天线阵面姿态调整系统的制作方法
本发明涉及天线调整系统,具体为天线阵面姿态调整系统。
背景技术:
1、无线基站天线的方位角、俯仰角是移动通信中重要的工程参数,其基本决定了无线信号的覆盖范围,目前电信运营商对基站天线的方位角、俯仰角的测量和调整还基本依靠传统人工方式,并在对天线进行测量调整工作时,都需要使用调整系统进行操作;
2、目前对天线进行测量检测工作时,往往通过调节机构辅助天线的活动调整,但天线在测量平台的活动范围有限,自由度较差,而通过传统人工方式对天线的俯仰角的测量和调整操作难度较大,增加操作难度以及劳动力,促使调整系统难以满足对天线阵面的精确测量与调整的指标要求。
技术实现思路
1、本发明的目的在于提供天线阵面姿态调整系统,以解决上述背景技术中提出的相关问题。
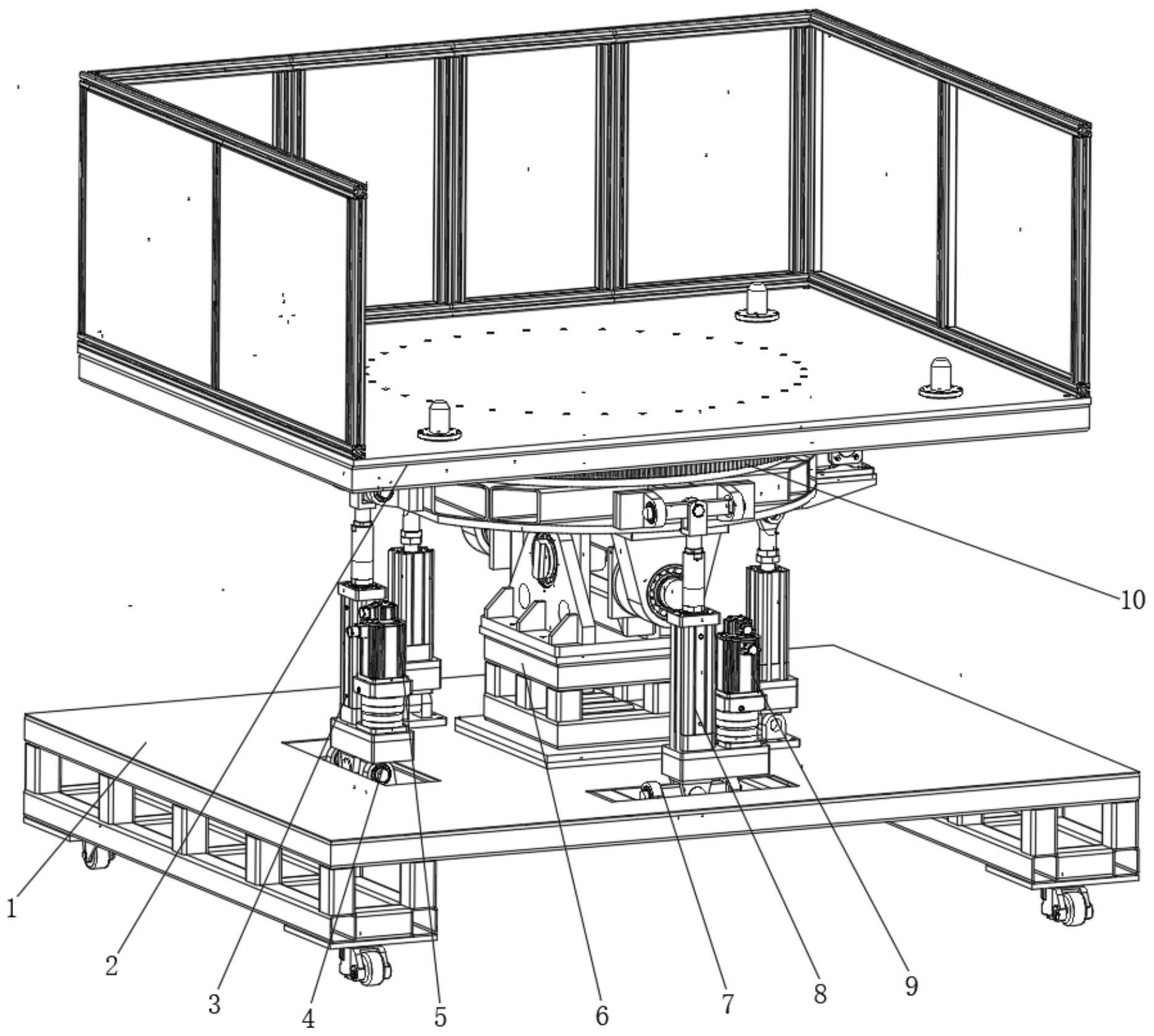
2、为实现上述目的,本发明提供如下技术方案:天线阵面姿态调整系统,包括下平台,所述下平台顶部的中间位置处安装有中部支撑柱,所述下平台顶部的两侧设有俯仰电缸下铰链,所述下平台顶部的两端设有横摇电缸下铰链,两组所述俯仰电缸下铰链的顶部分别设有俯仰电动缸与俯仰伺服驱动器,两组所述横摇电缸下铰链的顶部分别设有横摇电动缸和横摇伺服驱动器,所述中部支撑柱分别由支撑座和调节座组合而成,且调节座的两端设有中部铰链;
3、所述中部支撑柱内侧调节座的顶部套设有方位转台,所述中部支撑柱一侧的顶部设有伺服电机减速机,所述伺服电机减速机的输出端设有与方位转台啮合适配的齿轮,所述齿轮的顶部安装有回转平台,所述回转平台的顶部设有阵面装配平台,所述中部支撑柱内侧调节座的外侧分别设有两组横摇电缸上铰链与俯仰电缸上铰链,两组所述中部铰链与横摇电缸上铰链相互连接,两组所述俯仰电动缸与俯仰电缸上铰链活动连接。
4、优选的,所述阵面装配平台分别与俯仰电动缸和横摇电动缸以及方位转台组合构成完整的阵面姿态调整系统,且阵面姿态调整系统主要具备俯仰、摇摆及方位转台调节功能。
5、优选的,所述阵面装配平台顶部的边缘处设有防护围栏,且防护围栏的内侧为天线面装配空间。
6、优选的,所述方位转台与四轴平台调整系统相同,采用钢结构框架形式,伺服电机驱动。
7、优选的,所述方位转台的外侧设有一体式连接的外齿圈,且外齿圈与齿轮相互啮合,所述方位转台的内侧设有回转支撑轴承,且回转支撑轴承与中部支撑柱内侧的调节座套设连接。
8、优选的,所述两组所述俯仰电动缸与俯仰伺服驱动器在俯仰电缸下铰链的连接下活动倾斜,两组所述横摇电动缸和横摇伺服驱动器在横摇电缸下铰链的连接下活动倾斜。
9、优选的,所述下平台底部的四角处设有万向轮,且万向轮的外侧设有防滑纹。
10、优选的,所述方位转台与回转平台相互连接并旋转活动,所述回转平台与阵面装配平台固定连接。
11、与现有技术相比,本发明提供了天线阵面姿态调整系统,具备以下有益效果:
12、1、本发明通过将天线面姿态调整系统设计为三自由度运动平台,形成由计算机控制的高精度、多功能、多自由度运动设备,且利用该平台的组合式调节系统,能够实现俯仰、横摇、方位以及一系列复合运动环境模拟,并且在姿态变化范围内,俯仰、横摇、方位能同时各自独立地进行,彼此相互不干涉,以便让三自由度的平台实现绕坐标系类三轴旋转运动,从而满足三自由度的平台调整,利用姿态数据可收集上报,以便对运动系统状态信息和故障信息监控。
13、2、本发明通过阵面框架固定装置、可移动助力机械臂等组成,阵面装配单元力学平衡装置主要用于天线阵面装配过程中固定天线框架,辅助操作人员完成大型结构件的搬运、周转、安装对位等,减少操作人员数量和降低劳动强度、提高产品装配过程中的安全性,并利用万向节平台调整系统方位转台与四轴平台调整系统结构相符,从而在方位转台和回转转台连接配合下,采用电机通过大小齿轮传动,同时配有回转支撑,可承受大负载,增加系统调整状态的稳定性。
技术特征:
1.天线阵面姿态调整系统,包括下平台(1),其特征在于:所述下平台(1)顶部的中间位置处安装有中部支撑柱(6),所述下平台(1)顶部的两侧设有俯仰电缸下铰链(4),所述下平台(1)顶部的两端设有横摇电缸下铰链(7),两组所述俯仰电缸下铰链(4)的顶部分别设有俯仰电动缸(3)与俯仰伺服驱动器(5),两组所述横摇电缸下铰链(7)的顶部分别设有横摇电动缸(8)和横摇伺服驱动器(9),所述中部支撑柱(6)分别由支撑座和调节座组合而成,且调节座的两端设有中部铰链(13);
2.根据权利要求1所述的天线阵面姿态调整系统,其特征在于:所述阵面装配平台(2)分别与俯仰电动缸(3)和横摇电动缸(8)以及方位转台(10)组合构成完整的阵面姿态调整系统,且阵面姿态调整系统主要具备俯仰、摇摆及方位转台调节功能。
3.根据权利要求1所述的天线阵面姿态调整系统,其特征在于:所述阵面装配平台(2)顶部的边缘处设有防护围栏,且防护围栏的内侧为天线面装配空间。
4.根据权利要求1所述的天线阵面姿态调整系统,其特征在于:所述方位转台(10)与四轴平台调整系统相同,采用钢结构框架形式,伺服电机驱动。
5.根据权利要求1所述的天线阵面姿态调整系统,其特征在于:所述方位转台(10)的外侧设有一体式连接的外齿圈,且外齿圈与齿轮(16)相互啮合,所述方位转台(10)的内侧设有回转支撑轴承,且回转支撑轴承与中部支撑柱(6)内侧的调节座套设连接。
6.根据权利要求1所述的天线阵面姿态调整系统,其特征在于:所述两组所述俯仰电动缸(3)与俯仰伺服驱动器(5)在俯仰电缸下铰链(4)的连接下活动倾斜,两组所述横摇电动缸(8)和横摇伺服驱动器(9)在横摇电缸下铰链(7)的连接下活动倾斜。
7.根据权利要求1所述的天线阵面姿态调整系统,其特征在于:所述下平台(1)底部的四角处设有万向轮,且万向轮的外侧设有防滑纹。
8.根据权利要求1所述的天线阵面姿态调整系统,其特征在于:所述方位转台(10)与回转平台(11)相互连接并旋转活动,所述回转平台(11)与阵面装配平台(2)固定连接。
技术总结
本发明公开了天线阵面姿态调整系统,包括下平台,所述下平台顶部的中间位置处安装有中部支撑柱,所述下平台顶部的两侧设有俯仰电缸下铰链,所述下平台顶部的两端设有横摇电缸下铰链,两组所述俯仰电缸下铰链的顶部分别设有俯仰电动缸与俯仰伺服驱动器;本发明通过将天线面姿态调整系统设计为三自由度运动平台,形成由计算机控制的高精度、多功能、多自由度运动设备,且利用该平台的组合式调节系统,能够实现俯仰、横摇、方位以及一系列复合运动环境模拟,并且在姿态变化范围内,俯仰、横摇、方位能同时各自独立地进行,彼此相互不干涉,以便让三自由度的平台实现绕坐标系类三轴旋转运动,从而满足三自由度的平台调整。
技术研发人员:李康,张平华,沈杰
受保护的技术使用者:上海一航凯迈光机电设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!