一种晶圆清洗方法与流程
本发明属于晶圆后处理,具体而言,涉及一种晶圆清洗方法。
背景技术:
1、集成电路产业是信息技术产业的核心,在助推制造业向数字化、智能化转型升级的过程中发挥着关键作用。芯片是集成电路的载体,芯片制造涉及集成电路设计、晶圆制造、晶圆加工、电性测量、切割封装和测试等工艺流程。其中,化学机械抛光(chemicalmechanical polishing,cmp)是属于晶圆制造工序中的五大核心制程之一。
2、完成化学机械抛光的晶圆需要进行清洗、干燥等后处理,以避免微量离子和金属颗粒对半导体器件的污染,保障半导体器件的性能和合格率。常见的清洗方式有双流体喷射清洗、滚刷清洗和兆声波清洗等;常见的干燥方式有旋转干燥或马兰戈尼干燥等。
3、图1(a)是现有技术中晶圆清洗装置的示意图,该实施例中,采用软体的刷头10’擦洗晶圆表面。具体地,刷头10’设置于摆臂20’的端部并且刷头10’配置有独立驱动电机,使得刷头10’能够绕其中轴线旋转;摆臂20’设置于转轴30’的上端,其能够带动刷头10’绕转轴30’摆动,使得刷头10’能够擦洗旋转晶圆的表面。
4、在晶圆刷洗过程中,刷头10’在晶圆边缘位置和中心位置对应的晶圆的变形量不同,这会导致刷洗力不均匀,进而影响刷洗效果。
5、现有方案中,刷头10’配置有压力检测器(未示出),根据压力检测器的检测值来调整刷头10’的竖向位置,进而调整刷头10’作用于晶圆的刷洗力,但这种“先检测后调整”的控制方式存在一定滞后性,如图1(b)所示,因此,现有方案无法获取良好的清洗效果。
技术实现思路
1、本发明实施例提供了一种晶圆清洗方法,旨在至少解决现有技术中存在的技术问题之一。
2、本发明实施例的第一方面提供了一种
3、一种晶圆清洗方法,用于晶圆清洗的后处理装置包括箱体、设置于箱体的夹持机构和端部配置有刷头的摆臂,所述刷头能够随摆臂摆移动以清洁夹持机构固持的晶圆;其包括:
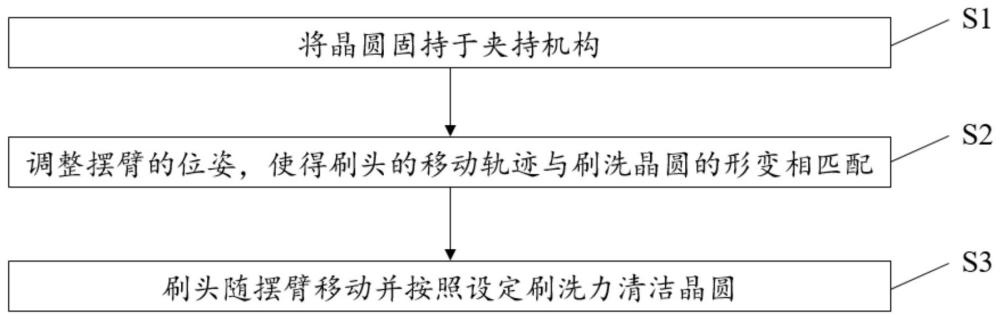
4、s1,将晶圆固持于夹持机构;
5、s2,调整摆臂的位姿,使得刷头的移动轨迹与刷洗晶圆的形变相匹配;
6、s3,刷头随摆臂移动并驱动摆臂摆动,随动的刷头按照设定刷洗力清洁晶圆。
7、进一步地,步骤s2中,利用摆臂下方转轴配置的调节销,调整摆臂的位置和姿态,以调节刷头的移动轨迹。
8、进一步地,步骤s2中,调整摆臂位姿的步骤包括:
9、s21,调整转轴的调节销,使得刷头在晶圆边缘的竖向位置相同;
10、s22,刷头抵压于晶圆并移动,将刷洗力维持恒定来调节摆臂的竖向位置,以获取刷头的移动轨迹;
11、s23,调整转轴的调节销,使得刷头自由摆动的移动轨迹与s22中的移动轨迹相吻合。
12、进一步地,s22中,刷头的刷洗力为晶圆刷洗的设定值,至少在晶圆中心处及两侧的边缘处获取摆臂的竖向位置。
13、进一步地,s23中,调整转轴的调节销时,摆臂的刷头处于自由状态。
14、进一步地,获取刷头的移动轨迹的步骤包括:
15、s221,移动刷头至晶圆边缘,将刷洗力维持恒定来调节摆臂的竖向位置,记录刷头的竖向位置;
16、s222,移动刷头至晶圆中心,将刷洗力维持恒定来调节摆臂的竖向位置,记录刷头的竖向位置;
17、s223,移动刷头至晶圆边缘与中心之间,将刷洗力维持恒定来调节摆臂的竖向位置,记录刷头的竖向位置。
18、本发明实施例的第二方面提供了一种后处理装置,执行上面所述的晶圆清洗方法,其还包括测距传感器,其可拆卸地设置于箱体中,以测量摆臂的竖向位置。
19、在一些实施例中,所述测距传感器的数量为多个,其设置于摆臂扫掠区域的上侧和/或下侧。
20、本发明实施例的第三方面提供了一种控制设备,其包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上面所述晶圆清洗方法的步骤。
21、本发明实施例的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上面所述晶圆清洗方法的步骤。
22、本发明的有益效果包括:在晶圆清洗之前,获取刷头的移动轨迹,使之与刷洗晶圆形变相匹配,再通过位姿调节组件调整摆臂的位姿,以通过机械的方式保证刷头的移动轨迹,解决现有清洗控制方法滞后的问题,保证晶圆的清洗效果。
技术特征:
1.一种晶圆清洗方法,用于晶圆清洗的后处理装置包括箱体、设置于箱体的夹持机构和端部配置有刷头的摆臂,所述刷头能够随摆臂移动以清洁夹持机构固持的晶圆;其特征在于,包括:
2.如权利要求1所述的晶圆清洗方法,其特征在于,步骤s2中,利用摆臂下方转轴配置的调节销,调整摆臂的位置和姿态,以调节刷头的移动轨迹。
3.如权利要求2所述的晶圆清洗方法,其特征在于,步骤s2中,调整摆臂位姿的步骤包括:
4.如权利要求3所述的晶圆清洗方法,其特征在于,s22中,刷头的刷洗力为晶圆刷洗的设定值,至少在晶圆中心处及两侧的边缘处获取摆臂的竖向位置。
5.如权利要求3所述的晶圆清洗方法,其特征在于,s23中,调整转轴的调节销时,摆臂的刷头处于自由状态。
6.如权利要求4所述的晶圆清洗方法,其特征在于,获取刷头的移动轨迹的步骤包括:
7.一种后处理装置,执行权利要求1至权利要求6任一项所述的晶圆清洗方法,其特征在于,还包括测距传感器,其可拆卸地设置于箱体中,以测量摆臂的竖向位置。
8.如权利要求7所述的后处理装置,其特征在于,所述测距传感器的数量为多个,其设置于摆臂扫掠区域的上侧和/或下侧。
9.一种控制设备,其特征在于,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至6中任一项所述晶圆清洗方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至6中任一项所述晶圆清洗方法的步骤。
技术总结
本发明公开了一种晶圆清洗方法,用于晶圆清洗的后处理装置包括箱体、设置于箱体的夹持机构和端部配置有刷头的摆臂,所述刷头能够随摆臂移动以清洁夹持机构固持的晶圆;其特征在于,包括:将晶圆固持于夹持机构;调整摆臂的位姿,使得刷头的移动轨迹与刷洗晶圆的形变相匹配;刷头随摆臂移动并按照设定刷洗力清洁晶圆。
技术研发人员:张丰达,王剑,李长坤,许振杰
受保护的技术使用者:华海清科股份有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!