一种基于脉冲信标光的激光相控阵系统及其控制方法与流程
本发明涉及激光相控阵、光束合成,更为具体的,涉及一种基于脉冲信标光的激光相控阵系统及其控制方法。
背景技术:
1、由于单台激光器的输出功率存在上限,一般需要采用多台子激光器合束方式的获得更高功率的激光输出。激光相控阵技术通过控制各路子光束指向,在每路子光束重合后进行相位锁定,实现多路激光高效相干合成,具有输出功率高、光束质量好等优点。
2、通常激光相控阵系统中的各路子激光波长相同,难以简单通过探测器上的子光束位置信息直接判断单路子激光的指向,因而现有技术一般基于优化算法控制光束指向。但是优化算法存在收敛速度慢、稳定性差的问题,降低了相干合成的效率,直接影响了光束合束的效果。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种基于脉冲信标光的激光相控阵系统及其控制方法,将高频脉冲信标光与窄线宽主激光相耦合,基于时分复用的方法,区分每路耦合后的子光束,通过探测信标光的光斑位置信息,确定每路信标光和主激光的方位和俯仰指向,解决了各子光束因波长一致无法分辨难以直接探测与控制指向的问题,能够有效提高激光合束的效果。
2、本发明的目的是通过以下方案实现的:
3、一种基于脉冲信标光的激光相控阵系统,包括:
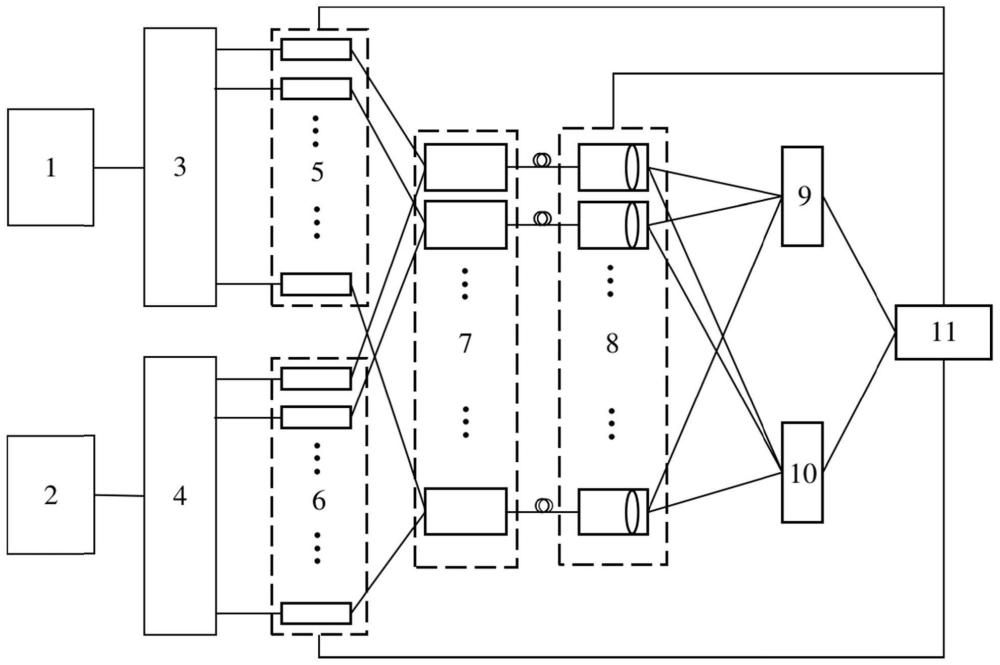
4、窄线宽光纤激光器、1×n主激光分束器、n个相位调制器、信标光纤激光器、1×n信标光分束器、n个强度调制器、n个光纤合束器、n个自适应光纤准直器、2个光电探测组件和信号处理机;
5、窄线宽光纤激光器输出光束经1×n主激光分束器后分为n路主激光,n是激光相控阵中子光束的数量;每路主激光经对应的相位调制器进行相位调制;信标激光器经1×n信标光分束器分为n路信标光;每路信标激光经对应的强度调制器进行强度调制;使用光纤合束器,将第i路信标光与第i路主激光耦合;通过信号处理机控制每路信标光的出光时序,使用光电探测组件探测信标光的光斑位置信息,同时用自适应光纤准直器调节每路信标光的指向以及聚焦位置;信号处理机与相位调制器、强度调制器、自适应光纤准直器和1号光电探测组件连接,用于接收1号光电探测组件采集到的图像信息,并将解算得到的控制信号传递至相位调制器、强度调制器和自适应光纤准直器。
6、进一步地,所述窄线宽光纤激光器输出的主激光波长与信标光纤激光器输出的信标光波长不同。
7、进一步地,当所述信号处理机发送第i+kn个触发信号时,i=1,2,....n,k为自然数,第i路强度调制器控制第i路信标光出光。
8、进一步地,所述自适应光纤准直器的致动部分包括压电陶瓷、电致伸缩材料、由电控镜、音圈电机、步进电机驱动方式中的任一种。
9、进一步地,所述光电探测组件包括成像光学组件与图像探测器。
10、进一步地,所述信号处理机通过随机并行梯度下降算法控制相位调制器。
11、进一步地,1号光电探测组件只探测信标光的指向,2号光电探测组件只探测主激光光强分布。
12、进一步地,图像探测器用于探测信标光的光斑位置信息和主激光的光强信息。
13、进一步地,随机并行梯度下降算法依据的性能评价函数包括光束质量因子、桶中功率和斯特列尔比。
14、一种基于脉冲信标光的激光相控阵系统的控制方法,包括如下步骤:
15、步骤1,指定基准位置:指定1号光电探测组件上的任意位置(x0,y0)作为光束照射基准位置,光束照射基准位置(x0,y0)通过目标识别与跟踪算法自动指定,或由操作员人工指定,所述基准位置包括探测器靶面中心;
16、步骤2,控制信标光出光时序:信号处理机向第i个强度调制器发送第i+kn个触发信号,i=1,2,....n且k为自然数,第i路强度调制器控制第i路脉冲信标光出光,其余子光束不出光;
17、步骤3,探测光班位置:使用1号光电探测组件,探测脉冲信标光的光斑位置(xi,yi),即为第i路信标光和第i路主激光的作用位置,光斑位置由质心算法计算得到,该位置信息传递至信号处理机;
18、步骤4,调整光束指向:信号处理机根据接收到的光束位置信息控制第i路自适应光纤准直器方向,以xi-x0=0和yi-y0=0为目标,采用pid控制方法,使第i个自适应光纤准直器在x和y方向偏转,直至光束指向从(xi,yi)调整至(x0,y0);
19、步骤5,利用spgd算法控制光束相位:当各子光束指向均调整到位置(x0,y0)后,使用信号处理机对第i路相位调制器发送随机扰动电压δu信号,先计算正向电压u+m=um-1+δu,δu为扰动电压,um-1为第m-1迭代的电压,通过2号光电探测组件采集该电压下的主激光光斑,确定正向性能评价函数j+=j(u+m),然后计算反向电压u-m=um-1-δu,通过2号光电探测组件采集该反向电压下的主激光光斑,确定反向性能评价函数j-=j(u-m)以及性能评价函数变化量δj=j+-δj-,更新电压um=um-1+γδuδj,γ为增益系数,获得新的性能评价函数,多次迭代计算,直至性能评价函数到达极值,评价函数j包括光束质量因子或桶中功率或斯特列尔比其中ω、θ、i(x,y)、b、i0实际、i0理想分别为光束的束腰半径、远场发散角、光束峰值功率分布、桶半宽、实际光束峰值功率和理想光束峰值功率。
20、本发明的有益效果包括:
21、本发明解决了现有激光相控阵技术中各子光束在相同波长无法直接指向探测与控制的问题,结合随机并行梯度下降方法控制子光束的相位,实现相干合成,有效提高了激光合束的效果。
技术特征:
1.一种基于脉冲信标光的激光相控阵系统,其特征在于,包括:
2.根据权利要求1所述的基于脉冲信标光的激光相控阵系统,其特征在于,所述窄线宽光纤激光器输出的主激光波长与信标光纤激光器输出的信标光波长不同。
3.根据权利要求1所述的基于脉冲信标光的激光相控阵系统,其特征在于,当所述信号处理机发送第i+kn个触发信号时,i=1,2,....n,k为自然数,第i路强度调制器控制第i路信标光出光。
4.根据权利要求1所述的基于脉冲信标光的激光相控阵系统,其特征在于,所述自适应光纤准直器的致动部分包括压电陶瓷、电致伸缩材料、由电控镜、音圈电机、步进电机驱动方式中的任一种。
5.根据权利要求1所述的基于脉冲信标光的激光相控阵系统,其特征在于,所述光电探测组件包括成像光学组件与图像探测器。
6.根据权利要求1所述的基于脉冲信标光的激光相控阵系统,其特征在于,所述信号处理机通过随机并行梯度下降算法控制相位调制器。
7.根据权利要求2所述的基于脉冲信标光的激光相控阵系统,其特征在于,1号光电探测组件只探测信标光的指向,2号光电探测组件只探测主激光光强分布。
8.根据权利要求5所述的基于脉冲信标光的激光相控阵系统,其特征在于,图像探测器用于探测信标光的光斑位置信息和主激光的光强信息。
9.根据权利要求6所述的基于脉冲信标光的激光相控阵系统,其特征在于,随机并行梯度下降算法依据的性能评价函数包括光束质量因子、桶中功率和斯特列尔比。
10.一种基于脉冲信标光的激光相控阵系统的控制方法,其特征在于,包括如下步骤:
技术总结
本发明公开了一种基于脉冲信标光的激光相控阵系统及其控制方法,属于激光相控阵和光束合成领域,该系统包括窄线宽光纤激光器、脉冲信标光纤激光器、主激光分束器、信标光分束、相位调制器、强度调制器、光纤合束器、自适应光纤准直器、光电探测组件和信号处理机;该方法包括:在每路窄线宽主激光中耦合脉冲信标光,利用时分复用的方法区分多路信标光束出光时序;使用光电探测组件探测每路信标光的指向,调整各路自适应光纤准直器的偏转,控制信标光的指向同时校正主激光指向;利用随机并行梯度下降方法调整子光束的相位,使各路子光束共相。本发明解决了子光束难以直接实现指向探测与控制的问题,有效提高了激光合束的控制性能。
技术研发人员:武春风,张滢,董理治,王勋,刘子裕,江颖,吴丰阳
受保护的技术使用者:航天科工微电子系统研究院有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!