一种绝缘型高空作业车平台电池管理方法及管理系统与流程
本发明涉及高空作业车,具体涉及一种绝缘型高空作业车平台电池管理方法及管理系统。
背景技术:
1、随着市场经济的发展,绝缘型高空作业在电力系统带电作业领域得到了广泛的应用。绝缘型高空作业车需要对高压带电线路进行作业,所以必须保证绝缘平台(即承载工作人员的作业斗)的绝缘性能。在日常带电作业工作中,为了实现绝缘平台和下部控制的连续性,并且满足绝缘等级国标要求,通常对工作斗采用全缩臂进行充电方式和全液压控制方式。全缩臂充电时,由于有效绝缘段回缩,当对部分较低线路作业时,操作人员容易忘记伸出绝缘臂就开始作业,由于车辆有效绝缘段为零,很容易造成人员触电危险,造成重大人身伤亡;绝缘平台采用全液压控制方式时,通常会在绝缘平台上设置蓄电池,但由于蓄电池自身供电能力有限,无法满足高空作业车所需的大电流长时间连续供电,需要人工对蓄电池进行充电,容易影响绝缘高空作业的工作效率。因此,如何在保持有效绝缘段不回缩的情况下对蓄电池用电进行管理是亟待解决的问题。
技术实现思路
1、本发明的目的在于提供一种绝缘型高空作业车平台电池管理方法及管理系统,可实现绝缘型高空作业车平台控制系统的可靠供电,保证平台控制系统的连续作业,提升高空作业平台运行的稳定性。
2、为实现上述目的,本发明一方面保护了一种绝缘型高空作业车绝缘平台电池管理方法,包括:
3、由平台控制器实时采集蓄电池状态并检测液压系统是否处于空闲,在蓄电池电量不足时通过液压系统带动液压发电机组为蓄电池充电。
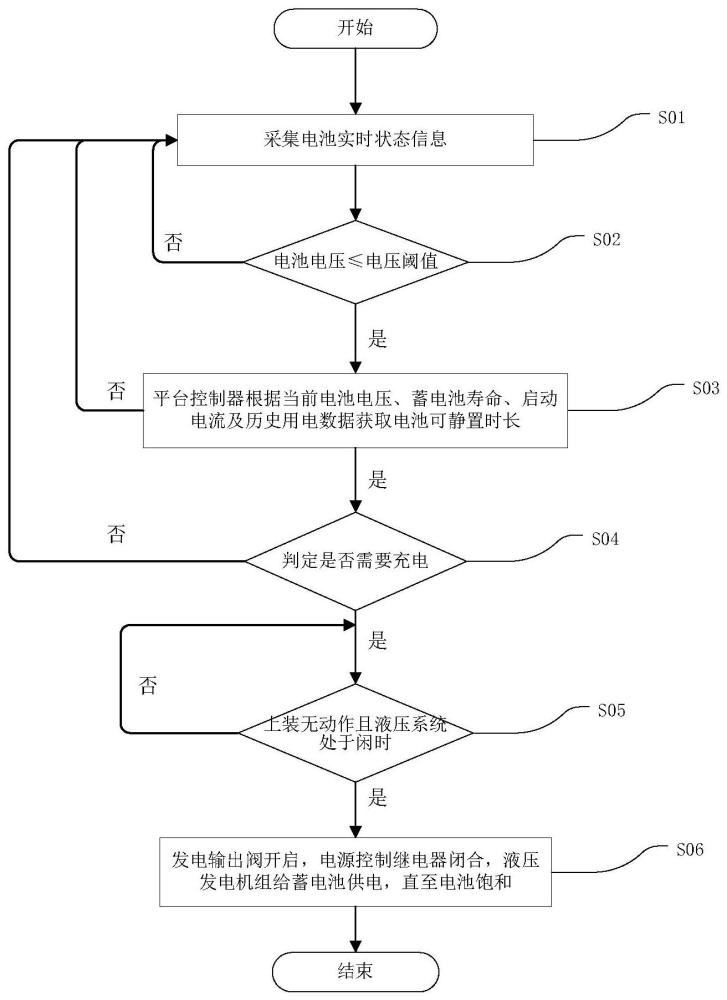
4、进一步地,判断蓄电池电量不足的方法为:将平台控制器获取的实时蓄电池电压与电压阈值比较,当蓄电池电压≤电压阈值时,即判定蓄电池电量不足,达到蓄电池充电条件。
5、进一步地,平台控制器进一步获取蓄电池电压、蓄电池寿命和启动电流及历史用电数据,并根据以上信息获取电池可工作时长。
6、进一步地,平台控制器检测到液压系统处于空闲状态后,控制液压系统带动液压发电机组为蓄电池充电。
7、进一步地,充电时,发电输出阀开启,电源控制继电器闭合,蓄电池充电直到饱和。
8、进一步地,通过整流器对蓄电池进行整流稳压,对蓄电池进行保护。
9、另一方面,本发明还保护了一种绝缘型高空作业车平台电池管理系统,包括整流器、液压发电机组、平台控制器、蓄电池、发电输出阀和电源控制继电器;所述液压发电机组通过所述整流器与所述蓄电池连接,所述平台控制器通过ai端口与所述蓄电池正极连接,所述平台控制器分别通过所述电源控制继电器和所述发电输出阀与所述蓄电池负极连接。
10、进一步地,所述液压发电机组通过液压马达带动电机给所述蓄电池充电。
11、进一步地,所述平台控制器通过a1端口采集蓄电池电压、蓄电池寿命、启动电流数据。
12、本发明的有益技术效果:
13、本发明通过设置缘型高空作业车平台电池管理系统,可以使绝缘段在不回缩的情况下,实时检测蓄电池的用电状态,在蓄电池需要充电的情况下,利用液压系统空闲时通过液压发电机组为蓄电池供电,从而可以实现蓄电池的自动充电补电,不需要操作人员人工现场看守,使绝缘平台能实现连续可靠作业,从而保证作业车的工作效率及安全性。
技术特征:
1.一种绝缘型高空作业车平台电池管理方法,其特征在于,包括:
2.根据权利要求1所述的绝缘型高空作业车平台电池管理方法,其特征在于,判断蓄电池电量不足的方法为:将平台控制器获取的实时蓄电池电压与电压阈值比较,当蓄电池电压≤电压阈值时,即判定蓄电池电量不足,达到蓄电池充电条件。
3.根据权利要求2所述的绝缘型高空作业车平台电池管理方法,其特征在于,平台控制器进一步获取蓄电池电压、蓄电池寿命和启动电流及历史用电数据,并根据以上信息获取电池可工作时长。
4.根据权利要求3所述的绝缘型高空作业车平台电池管理方法,其特征在于,平台控制器检测到液压系统处于空闲状态后,控制液压系统带动液压发电机组为蓄电池充电。
5.根据权利要求4所述的绝缘型高空作业车平台电池管理方法,其特征在于,充电时,发电输出阀开启,电源控制继电器闭合,蓄电池充电直到饱和。
6.根据权利要求5所述的绝缘型高空作业车平台电池管理方法,其特征在于,通过整流器对蓄电池进行整流稳压,对蓄电池进行保护。
7.一种绝缘型高空作业车平台电池管理系统,其特征在于,包括整流器、液压发电机组、平台控制器、蓄电池、发电输出阀和电源控制继电器;所述液压发电机组通过所述整流器与所述蓄电池连接,所述平台控制器通过ai端口与所述蓄电池正极连接,所述平台控制器分别通过所述电源控制继电器和所述发电输出阀与所述蓄电池负极连接。
8.根据权利要求7所述的绝缘型高空作业车平台电池管理系统,其特征在于,所述液压发电机组通过液压马达带动电机给所述蓄电池充电。
9.根据权利要求7所述的绝缘型高空作业车平台电池管理系统,其特征在于,所述平台控制器通过a1端口采集蓄电池电压、蓄电池寿命、启动电流数据。
技术总结
本发明公开了一种绝缘型高空作业车平台电池管理方法及管理系统,方法包括:通过平台控制器实时采集蓄电池电压;若采样到电池电压≤电压阈值,则蓄电池具备充电条件,进一步获取蓄电池可工作时长决定是否充电,然后获取液压系统处于空闲状态后,平台控制器通过DO端口控制发电输出阀开启,电源控制继电器闭合,液压发电机组给蓄电池供电,直至蓄电池饱和。本发明可对蓄电池进行实时监控并自动充电,使绝缘平台可连续工作,从而提高作业车的工作效率。
技术研发人员:商晓恒,赵瑞雪,满军,任路遥,崔腾霞
受保护的技术使用者:徐州徐工随车起重机有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!