一种磁控软体机器人径向磁化装置及方法
本发明属于磁控软体机器人领域,更具体地,涉及一种磁控软体机器人径向磁化装置及方法。
背景技术:
1、软体机器人是一种主体或者主要功能结构由软体材料(弹性模量大小介于104pa-109pa之间的材料)构成的机器人。与传统刚体机器人相比,软体机器人具有自由度高,变形能力强,适应性好等优点,在生物工程、医疗等领域具有广阔的应用前景。软体机器人运动模态研究是软体机器人研究的一个重要方向。其中,驱动方式对软体机器人的运动模态研究的核心之一。软体机器人的驱动方式包括气体驱动、智能材料驱动、电磁驱动等。其中,电磁驱动具有非接触、可控性强和穿透性能好等显著优势,电磁驱动方式作用下的磁软体机器人,已成为当前软体机器人领域的研究前沿和热点。
2、目前,主流的磁控软体机器人采用在弹性体基质内嵌永磁粒子的制备方法,并通过调控其内部磁化分布特性实现在外部激励磁场作用下的多模态响应。其中,径向分布磁化模式因具有对称特性而在磁控软体机器人领域得到广泛关注,已被应用于进行微创医疗、柔性操控以及仿生研究等。
3、现有磁性软体机器人的径向磁化模式主要通过多步磁化或者模具辅助磁化来实现。其中,多步磁化法磁化精度高、可编程,且可应用于3d结构机器人磁化以及实现复杂磁化模式调控,但其磁化方式固有地耦合到材料制造工艺中,虽然磁化精度有保证,但对磁化系统设计要求高,磁化过程较为复杂。另外,模具辅助法通过特定模具来约束磁化前软体机器人形状,可以用于实现径向磁化,但该类方法存在磁化精度(包括磁化区域的磁场强度和磁场对称性)受限,重复性较差等问题。
技术实现思路
1、针对现有技术的缺陷和改进需求,本发明提供了一种磁控软体机器人径向磁化装置及方法,其目的在于实现高精度的磁控软体机器人径向磁化。
2、为实现上述目的,按照本发明的一个方面,提供了一种磁控软体机器人径向磁化装置,包括:
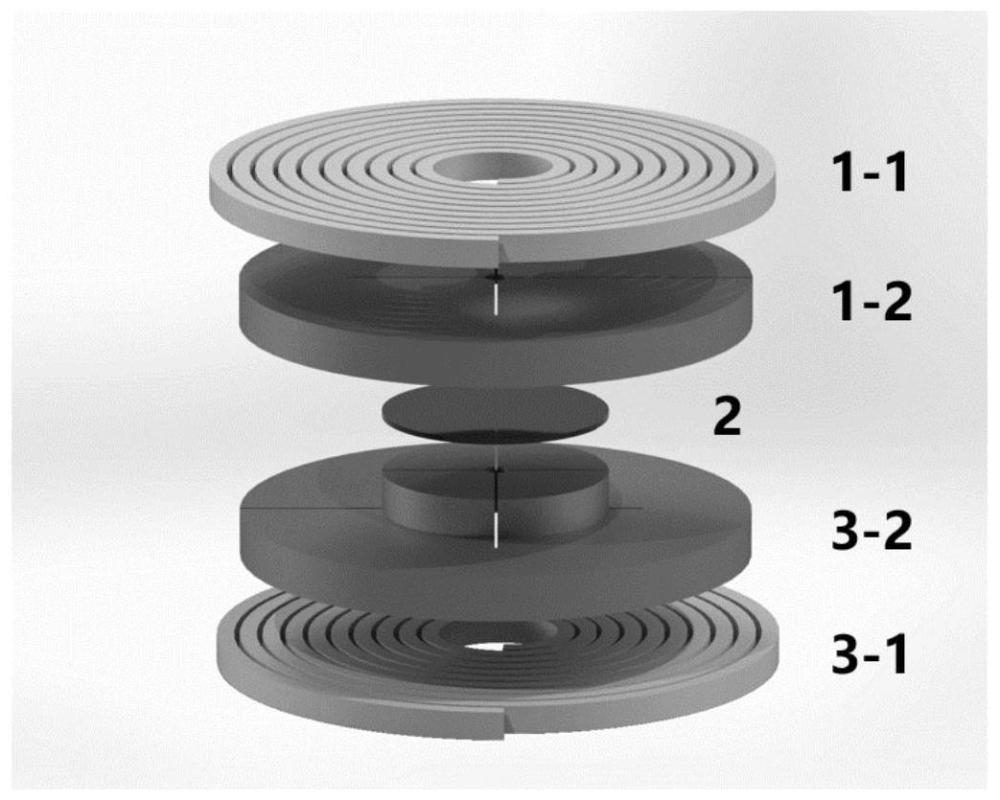
3、双线圈径向磁化模块,其包括顺序同轴设置的上线圈、上多缝异型集磁器、下多缝异型集磁器和下线圈;所述上多缝异型集磁器和所述上线圈之间的距离与所述下多缝异型集磁器和所述下线圈之间的距离相同,所述上多缝异型集磁器和下多缝异型集磁器之间的磁聚焦区域作为中间磁化区域,用于放置待径向磁化的磁控软体机器人样品;
4、脉冲电源模块,用于向所述上线圈和所述下线圈通入大小相等、方向相反的脉冲电流,此时所述上线圈和所述下线圈会分别产生磁场,所述上多缝异型集磁器会对上线圈所产生的磁场进行感应聚焦,所述下多缝异型集磁器会对下线圈所产生的磁场进行感应聚焦,两个集磁器所聚焦的位于所述中间磁化区域的磁场经叠加后形成较高强度和较高对称性的脉冲径向磁场,当磁控软体机器人样品几何中心位于所述中间磁化区域的中心位置时,能够实现所述磁控软体机器人样品的高强度和高对称性径向磁化。
5、进一步,用于固定双线圈径向磁化模块中各元件的固定构件为环氧骨架。
6、进一步,所述上多缝异型集磁器和所述下多缝异型集磁器均为四缝异型集磁器。
7、进一步,所述四缝异型集磁器上开有一条径向长缝和三条径向短缝。
8、进一步,所述脉冲电流的电流峰值在ka级、脉宽时间在微秒级及以上,根据实际所需的磁控软体机器人样品径向磁化强度需求进行确定调节。
9、本发明还提供一种基于如上所述的磁控软体机器人径向磁化装置进行磁控软体机器人径向磁化的方法,包括:
10、s1、将所述脉冲电源模块的电源线缆与所述双线圈径向磁化模块中的两个电源端子进行连接,实现在所述上线圈和所述下线圈中通入大小相等、方向相反的脉冲电流,将未充磁磁控软体机器人样品放置至所述中间磁化区域,对准样品和磁化区域的几何中心;
11、s2、设置放电电压,通过脉冲电源模块,完成双线圈径向磁化模块放电操作,使得在所述中间磁化区域产生一个高强度和高对称性的脉冲径向磁场;
12、s3、取出磁化完成后的磁软体机器人样品,完成一次径向磁化过程。
13、进一步,通过改变所述脉冲电源模块的放电电压、电源电容、续流电阻等参数,分别进行充磁,获得不同磁化强度的磁软体机器人样品。
14、总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
15、(1)本发明提供了一种磁控软体机器人径向磁化装置,通过脉冲电源模块,对双线圈径向磁化模块供电,产生径向磁场。具体的,双线圈径向磁化模块包括顺序同轴设置的上线圈、上多缝异型集磁器、下多缝异型集磁器和下线圈,在双线圈所产生的磁场区域,利用多缝异型集磁器分别对相应线圈所产生的磁场进行磁聚焦,增强了小区域内的磁场强度,同时多缝结构的引入也提升了磁化区域的磁场对称性,能够实现高强度、高对称性的磁软体机器人的高精度径向磁化,该装置无需模具辅助且为单步直接径向磁化,解决了磁软体机器人现有径向磁化方法相对复杂的问题。
16、(2)本发明中采用多缝异型集磁器,多缝集磁器在保证聚焦磁场强度的同时,磁化区域的磁场对称性较高。其中,四缝异型集磁器因其特定的90°缝隙夹角,能够在磁化区域产生对称性更好的径向磁化磁场,优选四缝异型集磁器。通过四缝异型集磁器进行磁聚焦,增强了磁化区域的磁场强度,提升了磁化区域的径向磁场对称性。
17、(3)提供了一种无模具辅助的磁软体机器人单步直接径向磁化方法。与现有的径向磁化方法相比,本发明提出的磁化方法在磁化区域直接产生径向磁场,无需模具辅助或多步磁化步骤,对磁化环节进行了简化。
技术特征:
1.一种磁控软体机器人径向磁化装置,其特征在于,包括:
2.根据权利要求1所述的一种磁控软体机器人径向磁化装置,其特征在于,用于固定双线圈径向磁化模块中各元件的固定构件为环氧骨架。
3.根据权利要求1所述的一种磁控软体机器人径向磁化装置,其特征在于,所述上多缝异型集磁器和所述下多缝异型集磁器均为四缝异型集磁器。
4.根据权利要求3所述的一种磁控软体机器人径向磁化装置,其特征在于,所述四缝异型集磁器上开有一条径向长缝和三条径向短缝。
5.根据权利要求1所述的一种磁控软体机器人径向磁化装置,其特征在于,所述脉冲电流的电流峰值在ka级、脉宽时间在微秒级及以上,根据实际所需的磁控软体机器人样品径向磁化强度需求进行确定调节。
6.一种基于如权利要求1至5任一项所述的磁控软体机器人径向磁化装置进行磁控软体机器人径向磁化的方法,其特征在于,包括:
7.根据权利要求6所述的方法,其特征在于,通过改变所述脉冲电源模块的放电电压、电源电容和续流电阻,分别进行充磁,获得不同磁化强度的磁软体机器人样品。
技术总结
本发明属于磁控软体机器人领域,具体涉及一种磁控软体机器人径向磁化装置及方法,包括:双线圈径向磁化模块,其包括顺序同轴设置的上线圈、上多缝异型集磁器、下多缝异型集磁器和下线圈;上集磁器和上线圈之间的距离与下集磁器和下线圈之间的距离相同,上下集磁器之间的磁聚焦区域作为中间磁化区域,用于放置待径向磁化的磁控软体机器人样品;脉冲电源模块,用于向上下线圈通入大小相等方向相反的脉冲电流,上下集磁器分别会对对应的上下线圈产生的磁场进行感应聚焦,两个集磁器所聚焦的位于中间磁化区域的磁场经叠加后形成高强度和高对称性的径向磁场,当样品几何中心位于中间磁化区域的中心位置时,能实现样品的高强度和高对称性径向磁化。
技术研发人员:曹全梁,文昊,朱鑫辉,李亮
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!