自动纠偏装置和自动化生产设备的制作方法
本技术涉及自动化,特别涉及一种自动纠偏装置和自动化生产设备。
背景技术:
1、磁环由内部的磁芯和绕设在磁芯上的线圈组成,广泛应用于仪器仪表、通信设备和家用电器中。磁环需要经过多个工序完成组装,在工序衔接之间,需要输送磁环,每一工序都需要磁环以特定的姿态进入,然而,在输送磁环的过程中,磁环容易错位和偏移,造成下一工序中磁环的放料姿态难以适配该工序的生产需求,使得不同工序之间无法自动连接,影响磁环生产效率。
技术实现思路
1、本实用新型的主要目的是提供一种自动纠偏装置,旨在磁环生产的过程中实现自动纠偏,提高磁环的生产效率。
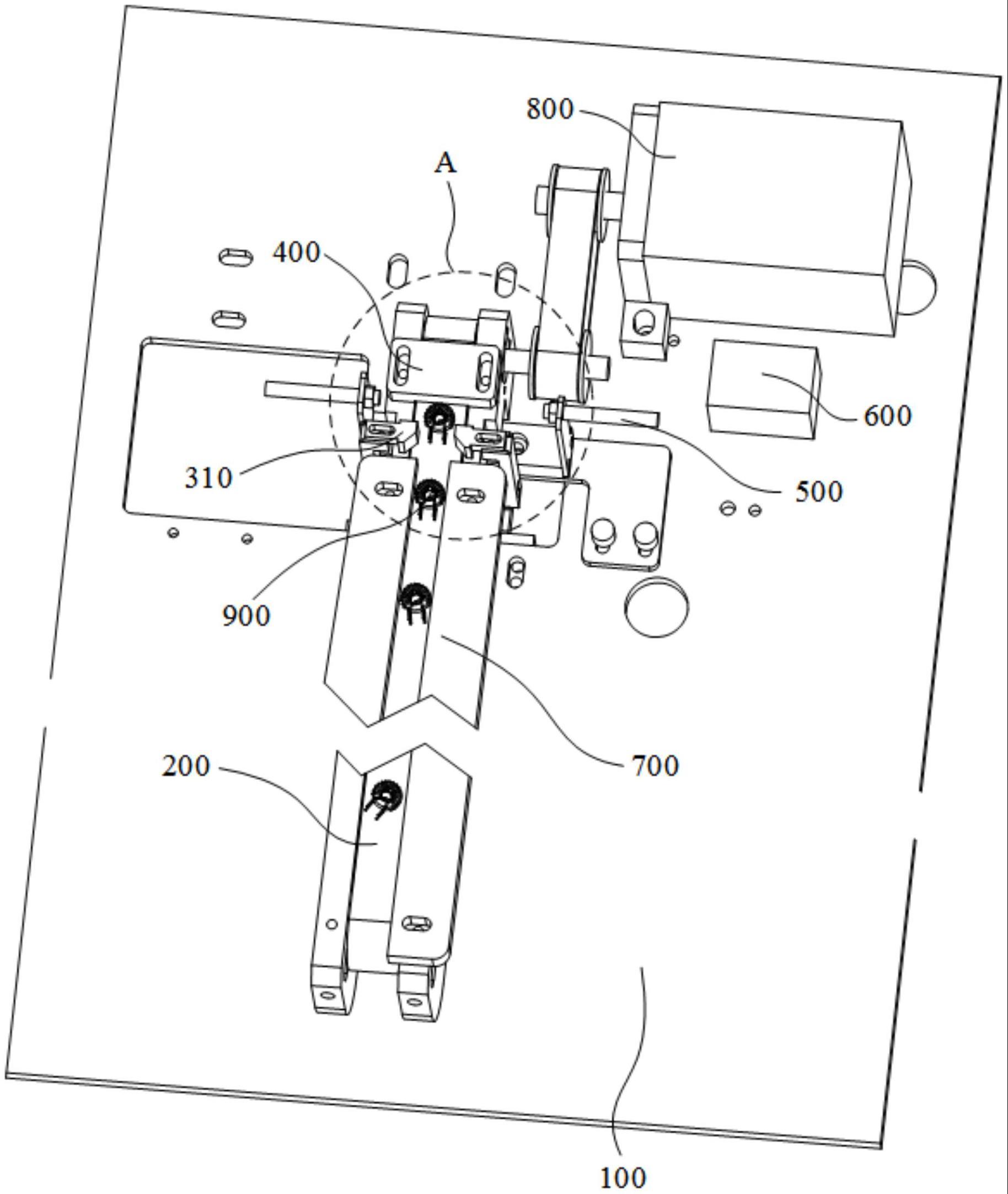
2、为实现上述目的,本实用新型提出一种自动纠偏装置,用于矫正磁环,所述磁环包括磁芯和绕组,所述绕组的引脚显露于所述磁芯,所述自动纠偏装置包括底座、传送件和矫正件;所述底座设有进料工位和矫正工位;所述传送件设于所述底座,所述传送件用于带动所述磁环自所述进料工位传送至矫正工位;所述矫正件设于所述矫正工位,所述矫正件具有可相对运动的两个活动部,两个所述活动部相向运动,能夹紧所述引脚,以将所述引脚与所述传送件的传送方向之间的夹角矫正为预设夹角。
3、可选地,所述矫正件还包括驱动件和两个安装臂,两个所述安装臂分设于所述传送件的相对两侧,所述安装臂与所述底座可活动连接,所述驱动件用于驱动两个所述安装臂做相对往复运动,一所述活动部可活动地设于一所述安装臂。
4、可选地,所述安装臂的上端设有调整槽,所述调整槽的延伸方向并行于两个所述活动部的分布方向,所述活动部适配安装于所述调整槽。
5、可选地,两个所述活动部的相对侧均设有导向斜面,自所述进料工位至所述矫正工位的方向,两个所述导向斜面的间距逐渐减少。
6、可选地,所述自动纠偏装置还包括定位件,所述传送件为传送皮带,所述定位件设于所述矫正工位,于所述传送皮带的传送方向,所述矫正件和所述定位件依次间隔设置,所述定位件与所述矫正件的间距适配所述磁芯的外径。
7、可选地,所述自动纠偏装置还包括设于所述底座的传感器和控制器,所述传感器、所述驱动件和所述传送皮带均与所述控制器电连接,所述传感器位于所述定位件和所述矫正件之间,所述传感器能够感应所述磁环,所述控制器用于根据所述传感器的感应结果控制所述驱动件和所述传送皮带。
8、可选地,所述定位件可活动地设于所述矫正工位,以使所述定位件与所述矫正件的间距可调节。
9、可选地,所述自动纠偏装置还包括分别设于所述传送皮带两侧的两个定位板,所述定位板沿所述进料工位和所述矫正工位的分布方向延伸,两个所述定位板的间距大于所述磁芯的外径,并小于所述引脚的长度与所述磁芯的外径之和。
10、可选地,两个所述定位板之间的间距可调节,以适配不同规格的所述磁环。
11、本实用新型还提出一种自动化生产设备,包括前述的自动纠偏装置。
12、本实用新型技术方案通过传送件将磁环自进料工位传送至矫正工位后,磁环上的引脚处于两个活动部的相对运动的直线上,然后,两个活动部相向活动,当活动部与引脚抵接后,活动部继续运动而推动引脚以调节磁环的姿态,当两个活动部夹紧引脚后,引脚与传送件之间的夹角即为预设夹角,也即,磁环处于预设的姿态,而后将该磁环取走至下一工序所在的工位,如此往复,任一一个磁环经过该自动纠偏装置后,都将以同样的预设的姿态被提取,并适配下一工序的放料姿态,从而实现在磁环的生产过程中自动纠偏,以提高磁环的生产效率。
技术特征:
1.一种自动纠偏装置,用于矫正磁环,其特征在于,所述磁环包括磁芯和绕组,所述绕组的引脚显露于所述磁芯,所述自动纠偏装置包括:
2.如权利要求1所述的自动纠偏装置,其特征在于,所述矫正件还包括驱动件和两个安装臂,两个所述安装臂分设于所述传送件的相对两侧,所述安装臂与所述底座可活动连接,所述驱动件用于驱动两个所述安装臂做相对往复运动,一所述活动部可活动地设于一所述安装臂。
3.如权利要求2所述的自动纠偏装置,其特征在于,所述安装臂的上端设有调整槽,所述调整槽的延伸方向并行于两个所述活动部的分布方向,所述活动部适配安装于所述调整槽。
4.如权利要求2所述的自动纠偏装置,其特征在于,两个所述活动部的相对侧均设有导向斜面,自所述进料工位至所述矫正工位的方向,两个所述导向斜面的间距逐渐减少。
5.如权利要求2所述的自动纠偏装置,其特征在于,所述自动纠偏装置还包括定位件,所述传送件为传送皮带,所述定位件设于所述矫正工位,于所述传送皮带的传送方向,所述矫正件和所述定位件依次间隔设置,所述定位件与所述矫正件的间距适配所述磁芯的外径。
6.如权利要求5所述的自动纠偏装置,其特征在于,所述自动纠偏装置还包括设于所述底座的传感器和控制器,所述传感器、所述驱动件和所述传送皮带均与所述控制器电连接,所述传感器位于所述定位件和所述矫正件之间,所述传感器能够感应所述磁环,所述控制器用于根据所述传感器的感应结果控制所述驱动件和所述传送皮带。
7.如权利要求5所述的自动纠偏装置,其特征在于,所述定位件可活动地设于所述矫正工位,以使所述定位件与所述矫正件的间距可调节。
8.如权利要求5所述的自动纠偏装置,其特征在于,所述自动纠偏装置还包括分别设于所述传送皮带两侧的两个定位板,所述定位板沿所述进料工位和所述矫正工位的分布方向延伸,两个所述定位板的间距大于所述磁芯的外径,并小于所述引脚的长度与所述磁芯的外径之和。
9.如权利要求8所述的自动纠偏装置,其特征在于,两个所述定位板之间的间距可调节,以适配不同规格的所述磁环。
10.一种自动化生产设备,其特征在于,包括权利要求1至9中任一项所述自动纠偏装置。
技术总结
本技术公开一种自动纠偏装置和自动化生产设备。所述自动纠偏装置用于矫正磁环,所述磁环包括磁芯和绕组,所述绕组的引脚显露于所述磁芯,所述自动纠偏装置包括底座、传送件和矫正件;所述底座设有进料工位和矫正工位;所述传送件设于所述底座,所述传送件用于带动所述磁环自所述进料工位传送至矫正工位;所述矫正件设于所述矫正工位,所述矫正件具有可相对运动的两个活动部,两个所述活动部相向运动,能夹紧所述引脚,以将所述引脚与所述传送件的传送方向之间的夹角矫正为预设夹角。本技术技术方案旨在磁环生产的过程中实现自动纠偏,提高磁环的生产效率。
技术研发人员:朱云青
受保护的技术使用者:深圳市伏特自动化科技有限公司
技术研发日:20230209
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!