一种晶圆清洗干燥装置的制作方法
本技术属于半导体集成电路芯片制造领域,尤其是涉及一种晶圆清洗干燥装置。
背景技术:
1、随着半导体生产处理技术的不断进步,超洁净处理的重要性持续提高。在化学机械平坦化设备(chemical mechanical planarization,cmp设备)里对清洁干燥的要求也在不断提高。在干燥湿润晶圆的工艺中,一个基本要求就是使晶圆干燥,并且杜绝原来附着在溶液中的任何颗粒重新附着至晶圆。如果晶圆没有使用适合的方法实现完全的干燥,溶液中的颗粒有可能会对半导体元件的电性特性造成影响,从而导致设备无法正常工作。因此,如何正确地去除晶圆上的液体是十分有必要的。
2、在绝大多数的cmp设备中,干燥晶圆的设备主要使用旋转甩干方式,其原理是把晶圆固定在一个高速旋转的基台上,使用电机让其达到较高的转速,让附着在其上面的液体通过离心力甩到晶圆外部实现干燥的效果。在此基础上,晶圆干燥作为清洗工艺的最后一个步骤,对晶圆的洁净度要求极高,因此往往还需要再次对晶圆表面进行化学液清洗,洁净水冲淋以及氮气吹干。上述气液体作用于晶圆的位置需要由电机通过皮带驱动摆臂旋转进行控制。此方式对皮带可靠性有较高要求,若发生皮带断裂或打滑摆臂无法将气液输出口定位至所需位置,导致晶圆最终清洗以及干燥工艺效果变差;且气液体摆臂的位置影响装置的工艺效果以及稳定性,需要对其实时监测。
技术实现思路
1、为了克服现有技术的不足,本实用新型提供一种准确监控摆臂的相对位置,保证摆臂工作稳定性的晶圆清洗干燥装置。
2、本实用新型解决其技术问题所采用的技术方案是:一种晶圆清洗干燥装置,包括,
3、晶圆夹爪,用于夹持晶圆;
4、工艺摆臂机构,用于向晶圆传输工艺流体,其包括带有至少一出孔的摆臂,及用于驱动摆臂活动的驱动单元;还包括:
5、检测摆件,包括可随摆臂活动的固定主体,及连接于固定主体的触发件,该触发件包括第一触发部和第二触发部;
6、感应件,至少包括第一感应件和第二感应件;
7、所述摆臂的活动点位至少包括限位点位和工艺区域位,所述第一感应件可与所述第一触发部配合,用于判断驱动单元是否带动摆臂活动至限位点位,所述第二感应件可与所述第二触发部配合,用于判断驱动单元是否带动摆臂活动至工艺区域位。
8、本实用新型通过第一感应件和第一触发部的配合,可以实时监测摆臂是否活动至限位点位,通过第二感应件和第二触发部的配合,可以实时监测摆臂是否处于工艺区域位,在实现驱动单元是否正常工作的判断基础上,可以避免摆臂过渡摆动,实现对摆臂的有效限位作用;触发件包括第一触发部和第二触发部,可以有效区分限位点位和工艺区域位的触发时机。
9、进一步的,所述限位点位包括第一限位点位和第二限位点位,所述摆臂在该第一限位点位和第二限位点位之间周向摆动。第一限位点位和第二限位点位有效限定了摆臂的摆动行程,避免摆臂过渡摆动。
10、进一步的,所述摆臂的活动点位还包括初始化停留位,其与第一限位点位的夹角为α,则α=0.1~2°。初始化停留位为设备初始化时摆臂的停留位置,其与第一限位点位的夹角设置给摆臂提供了足够的停留空间。
11、进一步的,所述摆臂的活动点位还包括工艺停留位,其与初始化停留位的夹角为β,则β=5~15°。给摆臂提供了足够的停留空间。
12、进一步的,所述工艺区域位由工艺极点位一和工艺极点位二围设形成,两者的夹角为θ,则θ=20~40°。工艺区域位b为工艺过程摆臂的扫掠范围,上述角度设置保证晶圆各处都能达到良好的干燥效果。
13、进一步的,所述工艺停留位和工艺极点位一的夹角为γ,则γ=4~12°。工艺停留位为批量生产过程中工艺结束后摆臂的停留位置,此位置设置保证晶圆取放过程不会与摆臂干涉。
14、进一步的,所述工艺极点位二和第二限位点位的夹角为δ,则δ=0.1~2°。给摆臂提供了足够的停留空间。
15、进一步的,所述第一触发部的宽度小于第二触发部的宽度;所述第二触发部呈圆弧形,其圆心角小于等于θ角。保证第二触发部和第二感应件配合实现良好的监测效果,避免第二触发部过长导致误触发。
16、进一步的,所述第一感应件的数量为至少三个,其在第一限位点位、第二限位点位、工艺停留位与第一触发部配合。
17、进一步的,所述驱动单元至少包括动力源,及同步带,所述同步带套设在动力源的输出轴和固定主体外围,或者,所述同步带套设在动力源的输出轴和摆臂旋转轴的外围,所述固定主体与摆臂的旋转轴相连。检测摆件和感应件配合可以监测同步带是否断裂或发生滑移,当同步带断裂或同步带和摆臂旋转轴或固定主体发生滑动时,摆臂无法转至指定位置,反馈信号失常,以便及时采取防范措施。
18、进一步的,还包括升降机构和防水罩,所述升降机构用于驱动防水罩上下移动。工艺过程防水罩升起,达到防止液体飞溅的目的,工艺结束防水罩下落便于晶圆取放。
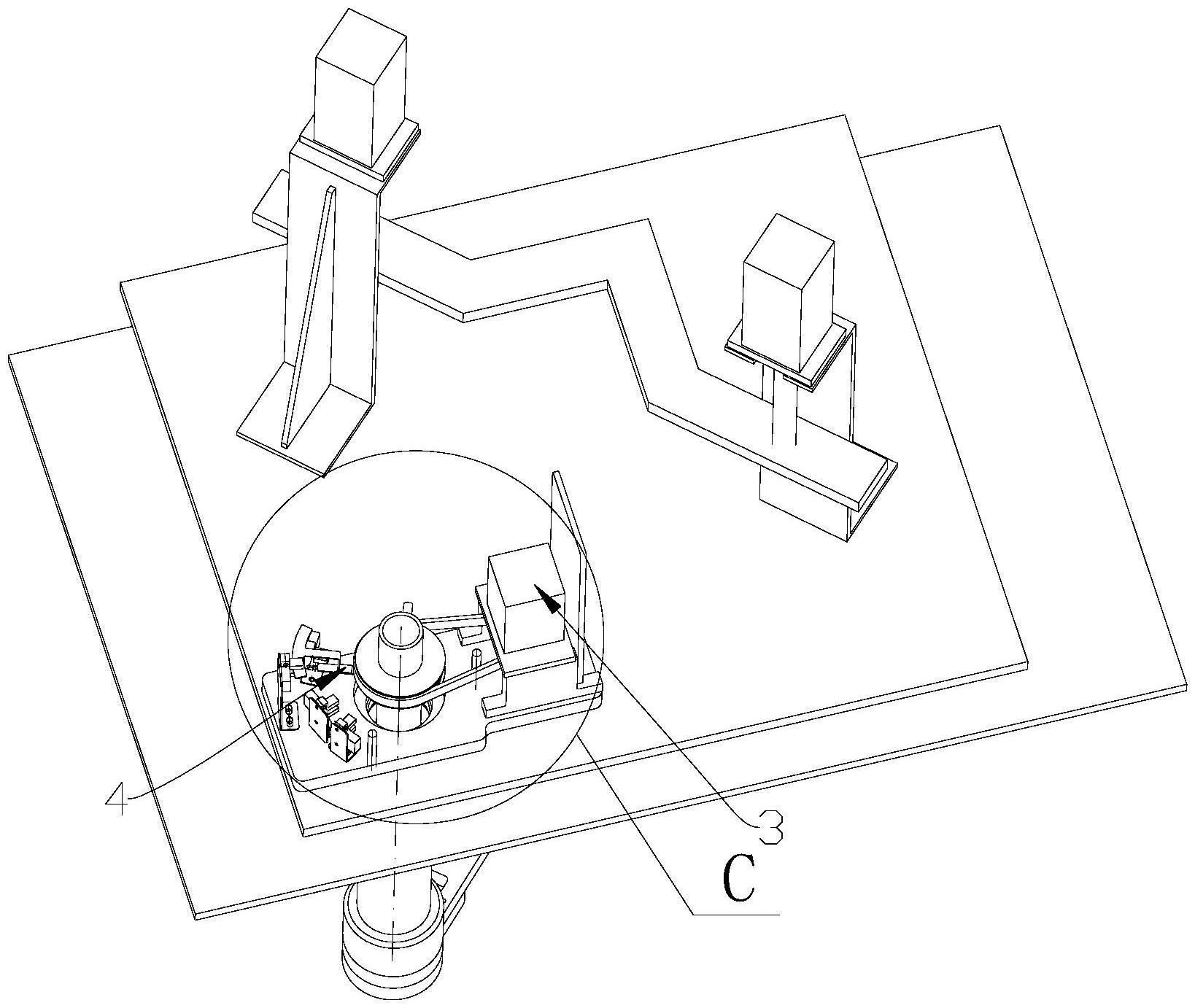
19、进一步的,还包括底座,所述晶圆夹爪、工艺摆臂机构和防水罩位于底座上方,所述驱动单元、升降机构、检测摆件和感应件位于底座下方。晶圆夹爪、工艺摆臂机构和防水罩处于洁净环境,驱动单元、升降机构、检测摆件与工艺空间隔离。
20、进一步的,所述出孔的数量为多个,至少一出孔的摆动轨迹经过晶圆的圆心。保证晶圆的径向各处均能接触工艺流体,实现良好的干燥效果。
21、进一步的,所述摆臂可与管路连接;所述工艺流体为化学液或洁净水或气体或其两种及以上的组合;所述工艺流体为氢氟酸,或为氨水,或为双氧水,或为臭氧,或为氮气。工艺流体可以为气体、液体或气液混合,使用形式多样。
22、本实用新型的有益效果是:通过感应件和触发件的配合,可以实时监测摆臂所处的活动点位,便于读取了解摆臂当前工艺状态;可监测同步带是否断裂或发生滑移,以便及时采取防范措施,保证摆臂运行的稳定可靠,保障良好的干燥工艺效果。
技术特征:
1.一种晶圆清洗干燥装置,包括,
2.根据权利要求1所述的晶圆清洗干燥装置,其特征在于:所述限位点位(a)包括第一限位点位(a1)和第二限位点位(a2),所述摆臂(22)在该第一限位点位(a1)和第二限位点位(a2)之间周向摆动。
3.根据权利要求2所述的晶圆清洗干燥装置,其特征在于:所述摆臂(22)的活动点位还包括初始化停留位(h),其与第一限位点位(a1)的夹角为α,则α=0.1~2°。
4.根据权利要求3所述的晶圆清洗干燥装置,其特征在于:所述摆臂(22)的活动点位还包括工艺停留位(p),其与初始化停留位(h)的夹角为β,则β=5~15°。
5.根据权利要求4所述的晶圆清洗干燥装置,其特征在于:所述工艺区域位(b)由工艺极点位一(b1)和工艺极点位二(b2)围设形成,两者的夹角为θ,则θ=20~40°。
6.根据权利要求5所述的晶圆清洗干燥装置,其特征在于:所述工艺停留位(p)和工艺极点位一(b1)的夹角为γ,则γ=4~12°。
7.根据权利要求5所述的晶圆清洗干燥装置,其特征在于:所述工艺极点位二(b2)和第二限位点位(a2)的夹角为δ,则δ=0.1~2°。
8.根据权利要求5所述的晶圆清洗干燥装置,其特征在于:所述第一触发部(421)的宽度小于第二触发部(422)的宽度;所述第二触发部(422)呈圆弧形,其圆心角小于等于θ角。
9.根据权利要求4所述的晶圆清洗干燥装置,其特征在于:所述第一感应件(51)的数量为至少三个,其在第一限位点位(a1)、第二限位点位(a2)、工艺停留位(p)与第一触发部(421)配合。
10.根据权利要求1所述的晶圆清洗干燥装置,其特征在于:所述驱动单元(3)至少包括动力源,及同步带(33),所述同步带(33)套设在动力源的输出轴和固定主体(41)外围,或者,所述同步带(33)套设在动力源的输出轴和摆臂(22)旋转轴(221)的外围,所述固定主体(41)与摆臂(22)的旋转轴(221)相连。
11.根据权利要求1所述的晶圆清洗干燥装置,其特征在于:还包括升降机构(6)和防水罩(61),所述升降机构(6)用于驱动防水罩(61)上下移动。
12.根据权利要求11所述的晶圆清洗干燥装置,其特征在于:还包括底座(62),所述晶圆夹爪(1)、工艺摆臂机构(2)和防水罩(61)位于底座(62)上方,所述驱动单元(3)、升降机构(6)、检测摆件(4)和感应件(5)位于底座(62)下方。
13.根据权利要求1所述的晶圆清洗干燥装置,其特征在于:所述出孔(21)的数量为多个,至少一出孔(21)的摆动轨迹经过晶圆(11)的圆心。
14.根据权利要求1所述的晶圆清洗干燥装置,其特征在于:所述摆臂(22)可与管路连接。
技术总结
本技术公开了一种晶圆清洗干燥装置,包括,晶圆夹爪;工艺摆臂机构,用于向晶圆传输工艺流体,其包括带有至少一出孔的摆臂,及驱动单元;还包括:检测摆件,包括可随摆臂活动的固定主体,及触发件,触发件包括第一触发部和第二触发部;感应件,至少包括第一感应件和第二感应件;摆臂的活动点位至少包括限位点位和工艺区域位,第一感应件可与第一触发部配合,用于判断驱动单元是否带动摆臂活动至限位点位,第二感应件可与第二触发部配合,用于判断驱动单元是否带动摆臂活动至工艺区域位。本技术通过感应件和触发件的配合,可实时监测摆臂所处的活动点位,便于读取了解摆臂当前工艺状态,保证摆臂运行的稳定可靠,保障良好的干燥工艺效果。
技术研发人员:殷骐
受保护的技术使用者:杭州众硅电子科技有限公司
技术研发日:20230214
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!