晶圆解键合装置的制作方法
本技术涉及半导体加工,尤其涉及一种晶圆解键合装置。
背景技术:
1、在3d堆叠技术中,针对临时键合晶圆,需开展解键合工作。在机械解键合过程中,需要准确地对键合的晶圆之间键合胶进行破坏以使晶圆能够分离,且需要恰当施力实现将晶圆完整分离开。
2、由于解键合操作的精度要求高,破坏键合胶层的过程耗时长,机械解键合的效率较低。因此,有必要提供一种能够进行高精度的快速解键合操作的设备。
技术实现思路
1、本实用新型的目的在于提供一种晶圆解键合装置,用以改善机械解键合效率低的问题。
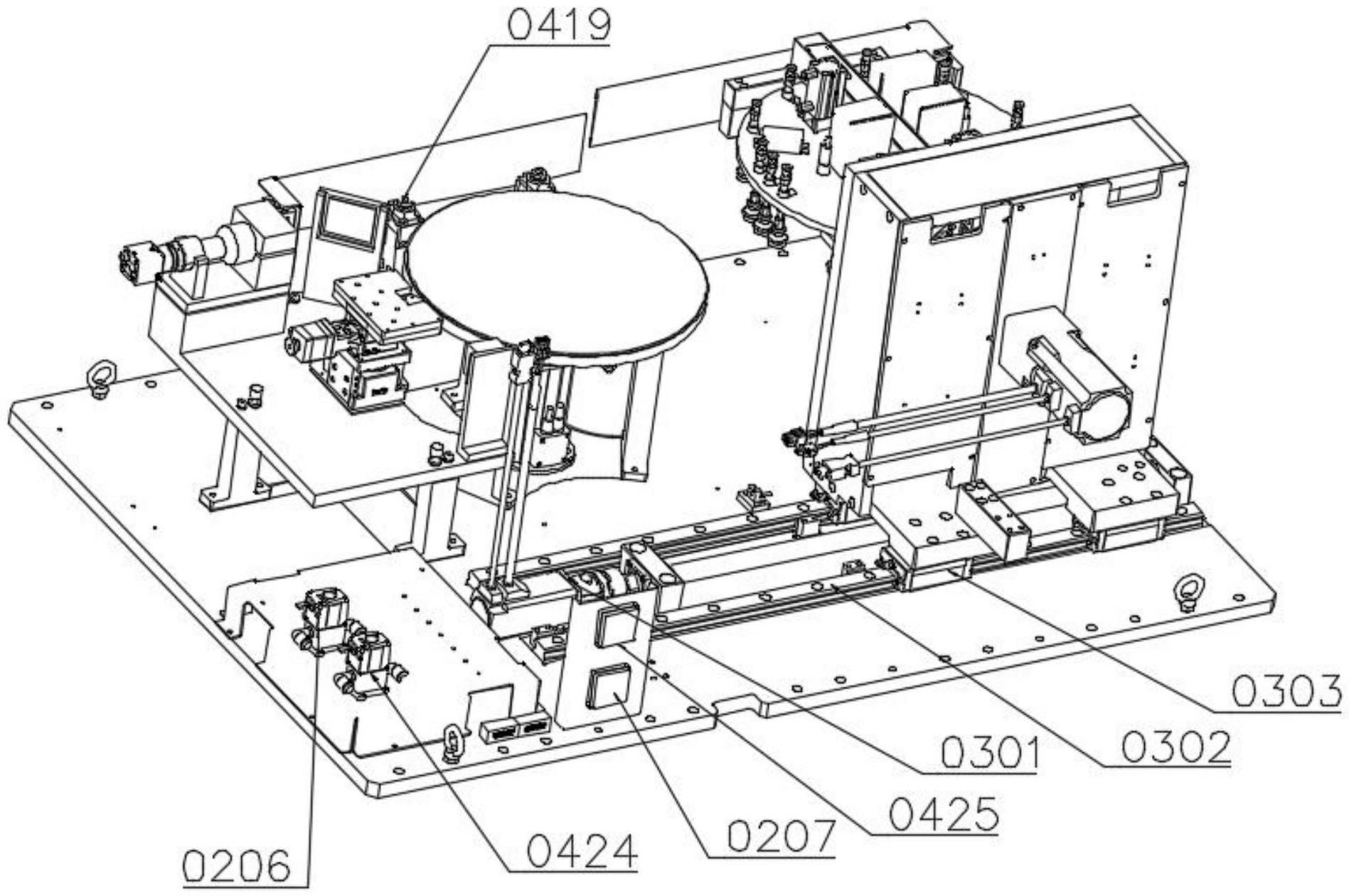
2、所述晶圆解键合装置包括:承载吸附部、移动部、拉拔翻转部和刀具对准部;所述承载吸附部用于承载键合片晶圆并吸附所述键合片晶圆的第一晶圆;所述移动部传动连接所述拉拔翻转部,用于带动所述拉拔翻转部在解键合位置和传出位置间移动;所述拉拔翻转部用于在所述解键合位置吸附所述键合片晶圆的第二晶圆,带动所述第二晶圆远离所述第一晶圆移动使所述第二晶圆和所述第一晶圆解键合,以及在所述传出位置翻转所述第二晶圆;所述刀具对准部用于对准所述第二晶圆和所述第一晶圆之间的键合胶层并刺出缺口。
3、一种可能的实施例中,所述拉拔翻转部包括顶板和拉拔吸盘,所述拉拔吸盘设置于所述顶板上,所述拉拔吸盘用于吸附所述第二晶圆,所述顶板距所述刀片对准部距离最小位置,所述拉拔吸盘的设置数量最多。
4、另一种可能的实施例中,所述拉拔翻转部包括顶板和距离传感器,所述距离传感器设置于所述顶板上,用于测量距所述第一晶圆的距离。
5、在其他可能的实施例中,所述拉拔翻转部包括吸附单元、拉拔单元和翻转单元,所述吸附单元用于吸附所述第二晶圆,所述拉拔单元连接所述吸附单元用于带动所述吸附单元和所述第二晶圆移动,所述翻转单元连接所述吸附单元用于带动所述吸附单元和所述第二晶圆翻转。
6、所述吸附单元包括拉拔吸盘、拉拔吸盘控制阀和拉拔吸盘真空表,所述拉拔吸盘控制阀和所述拉拔吸盘真空表均连接所述拉拔吸盘,所述拉拔吸盘控制阀用于打开或关闭所述拉拔吸盘真空,所述拉拔吸盘真空表用于检测所述拉拔吸盘的真空度。
7、所述拉拔翻转部还包括压力传感器,所述压力传感器连接所述吸附单元,用于测量所述拉拔单元带动所述吸附单元移动的力的大小。
8、所述翻转单元包括旋转组件、感应组件和安装件,所述感应组件包括位置传感器和传感器挡片,所述位置传感器安装在所述安装件上,所述传感器挡片连接所述旋转组件,所述旋转组件旋转带动所述传感器挡片运动以使所述传感器挡片接触所述位置传感器。
9、示例性地,所述晶圆解键合装置还包括机械手,所述机械手包括活动臂和设置于所述活动臂端部的取放器,所述取放器用于取放所述键合片晶圆、所述第一晶圆或所述第二晶圆,所述活动臂用于带动所述取放器移动。
10、所述刀具对准部包括图像获取装置,所述图像获取装置的镜头朝向所述承载吸附部,用于采集所述刀具对准部靠近所述键合片晶圆的图像。
11、所述刀具对准部包括具有进气孔和出气孔的刀具,所述进气孔与所述出气孔连通;所述进气孔连接有气体发生装置,所述出气口设置于所述刀具的刀头上,所述气体发生装置产生的气体从所述进气孔进入所述刀具内部并从所述出气孔吹出。
12、本实用新型提供的晶圆解键合装置的有益效果在于:通过刀具对准部精准对准键合胶层以刺出缺口,拉拔翻转部带动第二晶圆移动以使第一晶圆和第二晶圆解键合,能够通过晶圆解键合装置实现自动化的解键合操作,解键合精度高。拉拔翻转部带动解键合后的第二晶圆翻转,以及机械手对键合片晶圆、第一晶圆和第二晶圆的取放能够实现晶圆的放置、翻转和转移。晶圆解键合装置能够完成晶圆解键合的全自动流程,提高解键合效率。
技术特征:
1.一种晶圆解键合装置,其特征在于,包括:承载吸附部、移动部、拉拔翻转部和刀具对准部;
2.根据权利要求1所述的晶圆解键合装置,其特征在于,所述拉拔翻转部包括顶板和拉拔吸盘,所述拉拔吸盘设置于所述顶板上,所述拉拔吸盘用于吸附所述第二晶圆,所述顶板距所述刀具对准部距离最小位置,所述拉拔吸盘的设置数量最多。
3.根据权利要求1所述的晶圆解键合装置,其特征在于,所述拉拔翻转部包括顶板和距离传感器,所述距离传感器设置于所述顶板上,用于测量距所述第一晶圆的距离。
4.根据权利要求1所述的晶圆解键合装置,其特征在于,所述拉拔翻转部包括吸附单元、拉拔单元和翻转单元,所述吸附单元用于吸附所述第二晶圆,所述拉拔单元连接所述吸附单元用于带动所述吸附单元和所述第二晶圆移动,所述翻转单元连接所述吸附单元用于带动所述吸附单元和所述第二晶圆翻转。
5.根据权利要求4所述的晶圆解键合装置,其特征在于,所述吸附单元包括拉拔吸盘、拉拔吸盘控制阀和拉拔吸盘真空表,所述拉拔吸盘控制阀和所述拉拔吸盘真空表均连接所述拉拔吸盘,所述拉拔吸盘控制阀用于打开或关闭所述拉拔吸盘真空,所述拉拔吸盘真空表用于检测所述拉拔吸盘的真空度。
6.根据权利要求4所述的晶圆解键合装置,其特征在于,所述拉拔翻转部还包括压力传感器,所述压力传感器连接所述吸附单元,用于测量所述拉拔单元带动所述吸附单元移动的力的大小。
7.根据权利要求4所述的晶圆解键合装置,其特征在于,所述翻转单元包括旋转组件、感应组件和安装件,所述感应组件包括位置传感器和传感器挡片,所述位置传感器安装在所述安装件上,所述传感器挡片连接所述旋转组件,所述旋转组件旋转带动所述传感器挡片运动以使所述传感器挡片接触所述位置传感器。
8.根据权利要求1所述的晶圆解键合装置,其特征在于,还包括机械手,所述机械手包括活动臂和设置于所述活动臂端部的取放器,所述取放器用于取放所述键合片晶圆、所述第一晶圆或所述第二晶圆,所述活动臂用于带动所述取放器移动。
9.根据权利要求1所述的晶圆解键合装置,其特征在于,所述刀具对准部包括图像获取装置,所述图像获取装置的镜头朝向所述承载吸附部,用于采集所述刀具对准部靠近所述键合片晶圆的图像。
10.根据权利要求1所述的晶圆解键合装置,其特征在于,所述刀具对准部包括具有进气孔和出气孔的刀具,所述进气孔与所述出气孔连通;
技术总结
本技术提供了一种晶圆解键合装置,包括:承载吸附部、移动部、拉拔翻转部和刀具对准部;承载吸附部用于承载键合片晶圆并吸附键合片晶圆的第一晶圆;移动部传动连接拉拔翻转部,用于带动拉拔翻转部在解键合位置和传出位置间移动;拉拔翻转部用于在解键合位置吸附键合片晶圆的第二晶圆,带动第二晶圆远离第一晶圆移动使第二晶圆和第一晶圆解键合,以及在传出位置翻转第二晶圆;刀具对准部用于对准第二晶圆和第一晶圆之间的键合胶层并刺出缺口。该晶圆解键合装置的各部分结构配合能够实现键合片晶圆的放置、晶圆解键合、转移及翻转和晶圆的取出,通过晶圆解键合装置完成晶圆解键合的全自动流程,提高解键合效率。
技术研发人员:王金龙,温海涛,孙璞,徐晓伟,孙振聪
受保护的技术使用者:沈阳芯源微电子设备股份有限公司
技术研发日:20230404
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!