一种分选机械臂自动识别空篮、自动调运装置的制作方法
本技术涉及硅片转运设备,尤其涉及一种分选机械臂自动识别空篮、自动调运装置。
背景技术:
1、在太阳能硅片自动加工制造流程中,需要对硅片花篮进行转运。但是硅片花篮在转运过程中容易出现重心不稳以及难以对接分选机的问题。
2、文献号为cn207367945u的中国实用新型专利公开了一种硅片花篮转运装置及硅片自动输送制造设备。硅片花篮转运装置,包括第一输送线和第二输送线,第二输送线包括单轴机器人及至少两个转运组件,至少两个转运组件固定连接为一体,且连接至单轴机器人,单轴机器人用于带动转运组件直线移动,以使至少两个转运组件分别移动至第一输送线的端部处;转运组件包括底座及设置于底座的同步带机构。该技术方案中,装满硅片的花篮竖直放置在不同的输送线之间转运容易出现重心不稳导致晃动,使得硅片从花篮中滑出,且该输送线难以和分选机对接。
3、因此需要设计一种机械臂自动识别空篮、自动调运装置以解决上述技术问题。
技术实现思路
1、针对上述现有技术的缺点,本实用新型的目的是提供一种分选机械臂自动识别空篮、自动调运装置,以解决现有技术中的一个或多个问题。
2、为实现上述目的,本实用新型的技术方案如下:
3、一种分选机械臂自动识别空篮、自动调运装置,所述分选机械臂自动识别空篮、自动调运装置包括三轴龙门平台以及设置在所述三轴龙门平台内的输送区和中转区,所述三轴龙门平台上可移动地连接抓取装置;
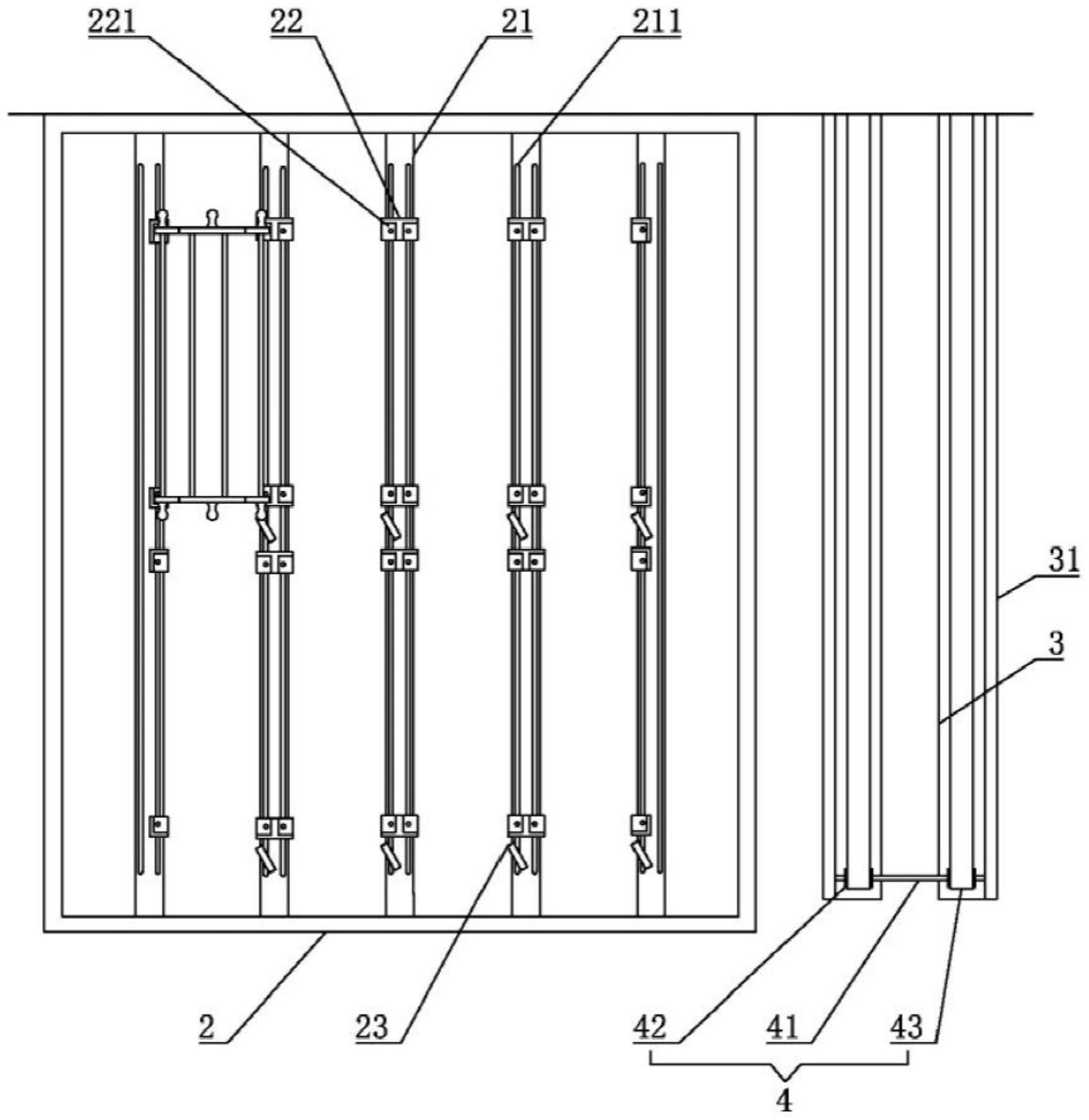
4、所述输送区包括平台,所述平台表面设置卡架,所述卡架远端侧面开设卡槽,四个相邻卡架之间的卡槽围合成容纳花篮的空间,所述平台上位于卡架一侧设置第一传感器,所述第一传感器用于检测卡槽内是否有花篮;
5、所述中转区包括支撑槽以及旋转设置在支撑槽上的输送机构,所述输送机构用于输送花篮;
6、所述抓取装置包括固定板以及设置在固定板远端两侧的气缸,两个气缸的输出端分别连接夹板,所述夹板近端设置第二传感器,所述第二传感器用于检测花篮中是否有硅片。
7、进一步的,所述平台远端设置若干轨道,每条所述轨道上开设两条腰型槽,所述卡架通过螺钉固定连接腰型槽。
8、进一步的,所述输送机构包括旋转连接在支撑槽上的转轴,所述转轴上还设置有两个带轮,所述带轮外侧设置传送带。
9、进一步的,所述传送带平行于所述轨道,且所述传送带长度大于花篮的长度。
10、进一步的,所述支撑槽侧面还设置围挡。
11、进一步的,所述三轴龙门平台包括底座、设置在底座远端的x轴移动组件、滑动设置在所述x轴移动组件远端的y轴移动组件、滑动设置在所述y轴移动组件远端侧面的z轴移动组件,所述z轴移动组件的近端连接固定板。
12、进一步的,所述夹板包括连接部以及设置在连接部近端两侧的勾部,所述连接部侧面设置第二传感器,当抓取装置位于花篮正上方且气缸输出端处于收缩状态时,两个第二传感器分别对准花篮中第一片硅片和最后一片硅片的位置。
13、进一步的,所述花篮包括两块底板以及设置在两块所述底板之间的齿杆,所述底板与齿杆围合成用于容纳硅片的空间。
14、进一步的,所述底板远离硅片一侧设置有至少三根限位杆。
15、与现有技术相比,本实用新型的有益技术效果如下:
16、(一)本实用新型的分选机械臂自动识别空篮、自动调运装置,通过第一传感器用于检测卡槽内是否有花篮,通过第二传感器用于检测花篮中是否有硅片,以此来决定抓取装置将空花篮或装满硅片的花篮在输送区、中转区、分选机之间转运,结构简单,自动化程度高,且转运精确性高。
17、(二)进一步的,设置中转区使得花篮硅片在分选时机械臂也能进行其他花篮的转运工作,提高花篮转运效率。
技术特征:
1.一种分选机械臂自动识别空篮、自动调运装置,其特征在于:所述分选机械臂自动识别空篮、自动调运装置包括三轴龙门平台以及设置在所述三轴龙门平台内的输送区和中转区,所述三轴龙门平台上可移动地连接抓取装置;
2.如权利要求1所述的一种分选机械臂自动识别空篮、自动调运装置,其特征在于:所述平台远端设置若干轨道,每条所述轨道上开设两条腰型槽,所述卡架通过螺钉固定连接腰型槽。
3.如权利要求2所述的一种分选机械臂自动识别空篮、自动调运装置,其特征在于:所述输送机构包括旋转连接在支撑槽上的转轴,所述转轴上还设置有两个带轮,所述带轮外侧设置传送带。
4.如权利要求3所述的一种分选机械臂自动识别空篮、自动调运装置,其特征在于:所述传送带平行于所述轨道,且所述传送带长度大于花篮的长度。
5.如权利要求1所述的一种分选机械臂自动识别空篮、自动调运装置,其特征在于:所述支撑槽侧面还设置围挡。
6.如权利要求1所述的一种分选机械臂自动识别空篮、自动调运装置,其特征在于:所述三轴龙门平台包括底座、设置在底座远端的x轴移动组件、滑动设置在所述x轴移动组件远端的y轴移动组件、滑动设置在所述y轴移动组件远端侧面的z轴移动组件,所述z轴移动组件的近端连接固定板。
7.如权利要求1所述的一种分选机械臂自动识别空篮、自动调运装置,其特征在于:所述夹板包括连接部以及设置在连接部近端两侧的勾部,所述连接部侧面设置第二传感器,当抓取装置位于花篮正上方且气缸输出端处于收缩状态时,两个第二传感器分别对准花篮中第一片硅片和最后一片硅片的位置。
8.如权利要求1所述的一种分选机械臂自动识别空篮、自动调运装置,其特征在于:所述花篮包括两块底板以及设置在两块所述底板之间的齿杆,所述底板与齿杆围合成用于容纳硅片的空间。
9.如权利要求8所述的一种分选机械臂自动识别空篮、自动调运装置,其特征在于:所述底板远离硅片一侧设置有至少三根限位杆。
技术总结
本技术涉及一种分选机械臂自动识别空篮、自动调运装置,所述分选机械臂自动识别空篮、自动调运装置包括三轴龙门平台以及设置在所述三轴龙门平台内的输送区和中转区,所述三轴龙门平台上可移动地连接抓取装置;所述输送区包括平台,所述平台表面设置卡架,所述卡架远端侧面开设卡槽,四个相邻卡架之间的卡槽围合成容纳花篮的空间,所述平台上位于卡架一侧设置第一传感器,所述第一传感器用于检测卡槽内是否有花篮;所述中转区包括支撑槽以及旋转设置在支撑槽上的输送机构,所述输送机构用于输送花篮;所述抓取装置包括固定板、气缸、夹板,所述夹板近端设置第二传感器,所述第二传感器用于检测花篮中是否有硅片。
技术研发人员:陈川南,周裕吉
受保护的技术使用者:无锡京运通科技有限公司
技术研发日:20230418
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!