晶圆搬运取放料装置的制作方法
本技术涉及晶圆贴膜,特别涉及一种晶圆搬运取放料装置。
背景技术:
1、目前半导体晶圆搬运设备主要技术是由机械手来进行,在机械手抓取晶圆过程中,容易使晶圆表面损伤;而且存在设备采购价格高、交期长的问题。
技术实现思路
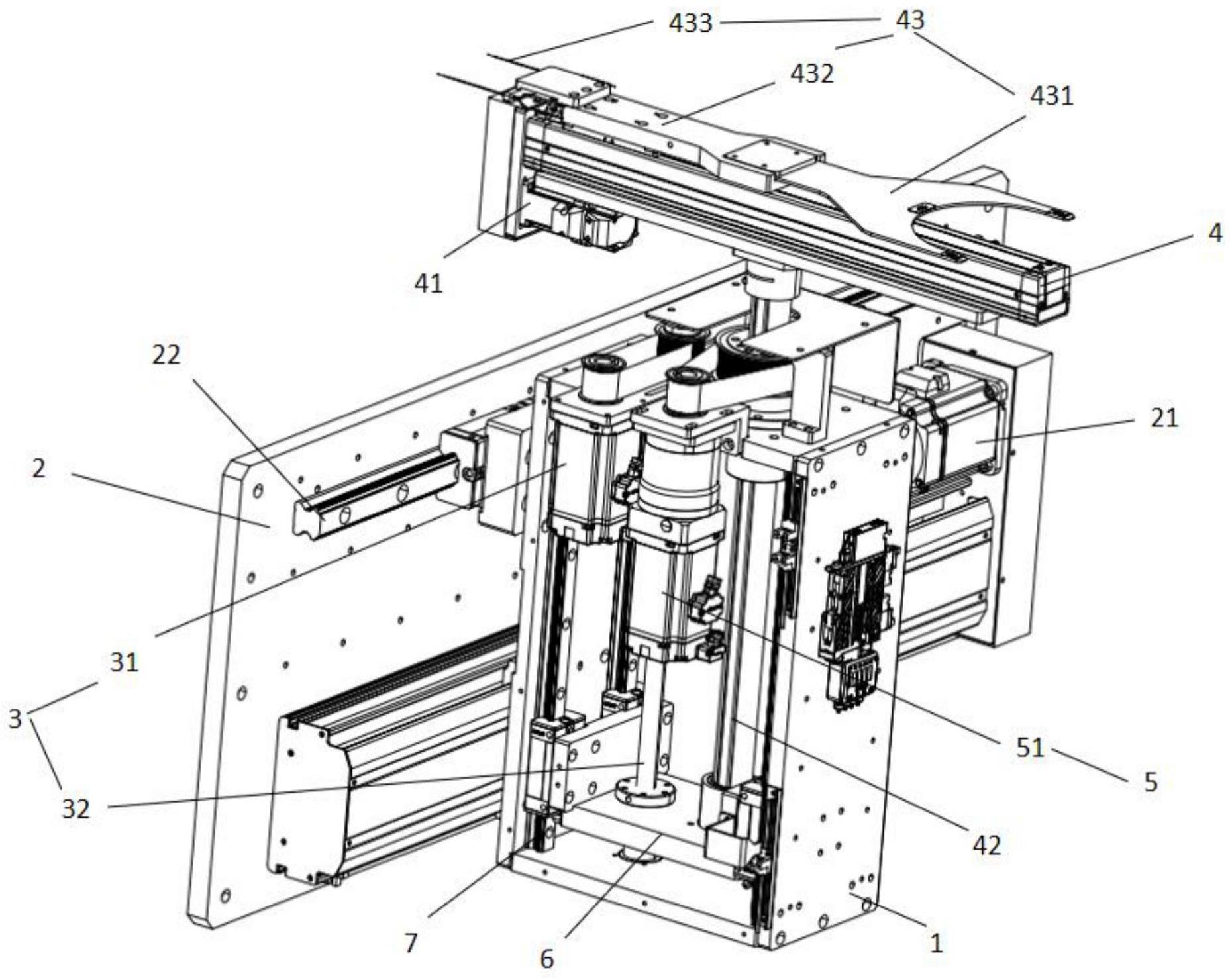
1、根据本实用新型实施例,提供了一种晶圆搬运取放料装置,包含架体,还包含:横向模组、升降模组、旋转模组和搬运模组;
2、横向模组与架体相连,可驱动架体往复运动;
3、升降模组分别与搬运模组、架体相连,可驱动搬运模组上下运动;
4、旋转模组与搬运模组相连,可驱动搬运模组旋转;
5、搬运模组用于搬运晶圆。
6、进一步,横向模组包含:横向驱动机构和横向导轨;
7、架体与横向导轨滑动连接;
8、横向驱动机构的输出端与架体相连,可驱动架体在横向导轨上往复运动。
9、进一步,升降模组包含:升降驱动机构和滚珠丝杠机构;
10、滚珠丝杠机构的输出端与搬运模组相连;
11、升降驱动机构的输出端与滚珠丝杠机构的输入端相连,可通过滚珠丝杠机构驱动搬运模组动作。
12、进一步,搬运模组包含:纵向驱动机构、旋转轴和取放料机构;
13、纵向驱动机构的输出端与取放料机构相连,可驱动取放料机构进行取放料动作;
14、旋转轴的一端与纵向驱动机构相连,另一端与升降模组的输出端相连;
15、旋转轴上沿轴向方向设置有若干滑槽,旋转模组的输出端通过若干滑槽与旋转轴相连。
16、进一步,取放料机构包含:夹爪、固定板和检测器;
17、夹爪与固定板相连;
18、固定板与纵向驱动机构的输出端相连;
19、检测器与固定板相连,用于检测晶圆位置。
20、进一步,夹爪上设置有若干吸附孔和内部通道;
21、若干吸附孔和内部通道相连通;
22、内部通道与外接气缸相连,外接气缸用于对内部通道抽真空。
23、进一步,夹爪一端设置有开口。
24、进一步,夹爪的材质为陶瓷材质。
25、进一步,还包含:固定架和若干导轨;
26、若干导轨分别设置在架体上,固定架两端分别与若干导轨滑动连接;
27、升降模组的输出端通过固定架与旋转轴相连。
28、进一步,旋转模组包含:旋转驱动机构和滚珠花键;
29、旋转驱动机构的输出端通过滚珠花键与旋转轴上的若干滑槽滑动连接,旋转轴可相对滚珠花键上下运动。
30、根据本实用新型实施例的晶圆搬运取放料装置,通过夹爪深入晶圆下表面,从下端抬起晶圆,并将晶圆吸附在夹爪上,不容易使晶圆表面损伤;且该装置制造周期短、成本低。
31、要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并 且意图在于提供要求保护的技术的进一步说明。
技术特征:
1.一种晶圆搬运取放料装置,包含架体,其特征在于,还包含:横向模组、升降模组、旋转模组和搬运模组;
2.如权利要求1所述的晶圆搬运取放料装置,其特征在于,所述横向模组包含:横向驱动机构和横向导轨;
3.如权利要求1所述的晶圆搬运取放料装置,其特征在于,所述升降模组包含:升降驱动机构和滚珠丝杠机构;
4.如权利要求1所述的晶圆搬运取放料装置,其特征在于,所述搬运模组包含:纵向驱动机构、旋转轴和取放料机构;
5.如权利要求4所述的晶圆搬运取放料装置,其特征在于,所述取放料机构包含:夹爪、固定板和检测器;
6.如权利要求5所述的晶圆搬运取放料装置,其特征在于,所述夹爪上设置有若干吸附孔和内部通道;
7.如权利要求6所述的晶圆搬运取放料装置,其特征在于,所述夹爪一端设置有开口。
8.如权利要求5所述的晶圆搬运取放料装置,其特征在于,所述夹爪的材质为陶瓷材质。
9.如权利要求4所述的晶圆搬运取放料装置,其特征在于,还包含:固定架和若干导轨;
10.如权利要求4所述的晶圆搬运取放料装置,其特征在于,所述旋转模组包含:旋转驱动机构和滚珠花键;
技术总结
本技术公开了一种晶圆搬运取放料装置,包含架体,还包含:横向模组、升降模组、旋转模组和搬运模组;其中,横向模组与架体相连,可驱动架体往复运动;升降模组分别与搬运模组、架体相连,可驱动搬运模组上下运动;旋转模组与搬运模组相连,可驱动搬运模组旋转;搬运模组用于搬运晶圆。本技术能够通过夹爪深入晶圆下表面,从下端抬起晶圆,并将晶圆吸附在夹爪上,不容易使晶圆表面损伤;且该装置制造周期短、成本低。
技术研发人员:余俊成
受保护的技术使用者:上海铭沣科技股份有限公司
技术研发日:20230706
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!