用于改变硅片姿态的旋转机构及搬运系统的制作方法
本技术涉及光伏,尤其是指一种用于改变硅片姿态的旋转机构及搬运系统。
背景技术:
1、光伏太阳能自动化设备的研发和改进,优化了太阳能电池片规模化生产的问题,使太阳能这一清洁能源得到普遍使用。而太阳能光伏电池的自动化制造设备与其主工艺设备之间在线连接传送的关键问题是解决硅片的变节距传送。
2、在对硅片传送变节距线体结构进行设计时,往往要根据现场的车间布局以及对接的自动化设备具体分析用哪一种变节距结构。
3、目前,变节距结构的通道数量分为偶数通道和奇数通道,但目前缺少既适配偶数通道和奇数通道的搬运硅片的机构,因此,亟需设计一款既适配偶数通道和奇数通道的搬运硅片的机构。
技术实现思路
1、针对现有技术的不足,本实用新型公开了一种用于改变硅片姿态的旋转机构及搬运系统。
2、本实用新型所采用的技术方案如下:
3、一种用于改变硅片姿态的旋转机构,包括:
4、分合机构,包括分合片驱动源和传动组件,所述分合片驱动源的输出端连接所述传动组件;
5、第一旋转机构,和所述传动组件连接并同步运动;所述第一旋转机构包括第一驱动组件、第一回转座和第一吸盘组件,所述第一驱动组件驱动第一回转座旋转,所述第一回转座连接所述第一吸盘组件;
6、第二旋转机构,和所述传动组件连接并同步运动;所述第二旋转机构包括第二驱动组件、第二回转座和第二吸盘组件,所述第二驱动组件驱动第一回转座旋转,所述第二回转座连接所述第二吸盘组件;其中,所述第一吸盘组件和所述第二吸盘组件均包括多个吸盘;
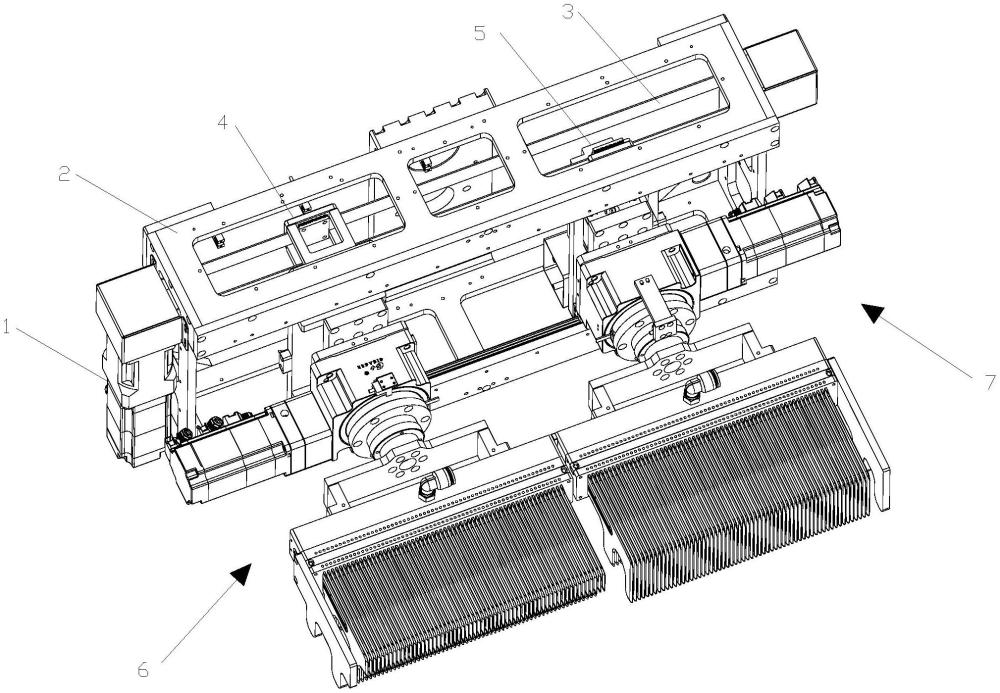
7、当所述分合机构驱动所述第一旋转机构和所述第二旋转机构相对靠近,且所述第一旋转机构和所述第二旋转机构均转动至指定位置时,所述第一吸盘组件的吸盘和所述第二吸盘组件的吸盘拼接形成取片台。
8、在本实用新型的一个实施例中,所述吸盘包括主体部和至少两个沿所述主体部延伸形成的卡合部,相邻两个所述卡合部之间预留间距。
9、在本实用新型的一个实施例中,所述第一驱动组件包括第一电机和第一减速机,所述第一电机的输出端连接所述第一减速机的输入端,所述第一减速机的输出端连接所述第一回转座。
10、在本实用新型的一个实施例中,所述第一旋转机构还包括第一磁栅,所述第一磁栅设于所述第一回转座,以监测所述第一回转座的旋转角度。
11、在本实用新型的一个实施例中,所述第二驱动组件包括第二电机和第二减速机,所述第二电机的输出端连接所述第二减速机的输入端,所述第二减速机的输出端连接所述第二回转座。
12、在本实用新型的一个实施例中,所述第二旋转机构还包括第二磁栅,所述第二磁栅设于所述第二回转座,以监测所述第二回转座的旋转角度。
13、在本实用新型的一个实施例中,所述传动组件包括第一同步轮、同步带和第二同步轮,所述同步带张紧于所述第一同步轮和所述第二同步轮,所述分合片驱动源的输出端连接第一同步轮。
14、在本实用新型的一个实施例中,还包括至少一纠偏机构,所述纠偏机构与所述第一旋转机构或所述第二旋转机构连接,被设置为调节所述第一旋转机构或所述第二旋转机构在垂直平面内的高度。
15、在本实用新型的一个实施例中,所述纠偏机构包括纠偏电机、滚珠丝杠和螺母座,所述纠偏电机的输出端连接所述滚珠丝杠,所述螺母座和所述滚珠丝杠螺纹连接,所述螺母座与所述第一旋转机构或所述第二旋转机构连接。
16、本实用新型还提供一种搬运系统,包括:
17、多轴机器人,具有多个通过关节连接的单轴机械臂;
18、如上述所述的用于改变硅片姿态的旋转机构,安装于所述多轴机器人的末节单轴机械臂的末端。
19、本实用新型的上述技术方案相比现有技术具有以下优点:
20、本实用新型所述的用于改变硅片姿态的旋转机构可以是分片姿态(有两组取放硅片的平台)或合片姿态(有一组取放硅片的平台),适配偶数通道和奇数通道的搬运硅片,提高搬运系统的搬运效率。
技术特征:
1.一种用于改变硅片姿态的旋转机构,其特征在于,包括:
2.根据权利要求1所述的用于改变硅片姿态的旋转机构,其特征在于,所述吸盘包括主体部和至少两个沿所述主体部延伸形成的卡合部,相邻两个所述卡合部之间预留间距。
3.根据权利要求1所述的用于改变硅片姿态的旋转机构,其特征在于,所述第一驱动组件包括第一电机(601)和第一减速机(602),所述第一电机(601)的输出端连接所述第一减速机(602)的输入端,所述第一减速机(602)的输出端连接所述第一回转座。
4.根据权利要求1所述的用于改变硅片姿态的旋转机构,其特征在于,所述第一旋转机构(6)还包括第一磁栅(603),所述第一磁栅(603)设于所述第一回转座,以监测所述第一回转座的旋转角度。
5.根据权利要求1所述的用于改变硅片姿态的旋转机构,其特征在于,所述第二驱动组件包括第二电机(701)和第二减速机(702),所述第二电机(701)的输出端连接所述第二减速机(702)的输入端,所述第二减速机(702)的输出端连接所述第二回转座。
6.根据权利要求1所述的用于改变硅片姿态的旋转机构,其特征在于,所述第二旋转机构(7)还包括第二磁栅(703),所述第二磁栅(703)设于所述第二回转座,以监测所述第二回转座的旋转角度。
7.根据权利要求1所述的用于改变硅片姿态的旋转机构,其特征在于,所述传动组件包括第一同步轮、同步带(3)和第二同步轮,所述同步带(3)张紧于所述第一同步轮和所述第二同步轮,所述分合片驱动源(1)的输出端连接第一同步轮。
8.根据权利要求1所述的用于改变硅片姿态的旋转机构,其特征在于,还包括至少一纠偏机构(8),所述纠偏机构(8)与所述第一旋转机构(6)或所述第二旋转机构(7)连接,被设置为调节所述第一旋转机构(6)或所述第二旋转机构(7)在垂直平面内的高度。
9.根据权利要求8所述的用于改变硅片姿态的旋转机构,其特征在于,所述纠偏机构(8)包括纠偏电机(801)、滚珠丝杠(802)和螺母座(803),所述纠偏电机(801)的输出端连接所述滚珠丝杠(802),所述螺母座(803)和所述滚珠丝杠(802)螺纹连接,所述螺母座(803)与所述第一旋转机构(6)或所述第二旋转机构(7)连接。
10.一种搬运系统,其特征在于,包括:
技术总结
本技术涉及一种用于改变硅片姿态的旋转机构及搬运系统,其中旋转机构包括:分合机构,分合片驱动源和与其连接的传动组件;第一旋转机构和传动组件连接;第一旋转机构包括第一驱动组件、第一回转座和第一吸盘组件,第一驱动组件驱动第一回转座旋转,第一回转座连接第一吸盘组件;第二旋转机构和传动组件连接;第二旋转机构包括第二驱动组件、第二回转座和第二吸盘组件,第二驱动组件驱动第一回转座旋转,第二回转座连接第二吸盘组件;当分合机构驱动第一旋转机构和第二旋转机构相对靠近,且第一旋转机构和第二旋转机构均转动至指定位置时,第一吸盘组件的吸盘和第二吸盘组件的吸盘拼接形成取片台。本技术将硅片搬至奇数通道的变节距机构。
技术研发人员:戴军,罗银兵,王政诗
受保护的技术使用者:罗博特科智能科技股份有限公司
技术研发日:20230809
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!