超洁净双柔性快速精确叠合的四指机器人的制作方法
本发明涉及晶圆运输,具体涉及超洁净双柔性快速精确叠合的四指机器人。
背景技术:
1、在晶圆加工的过程中,需要使用机械臂将晶圆从一个工位运输至另一个工位上,在这个过程中,机械臂需要高频次的重复运输,同时还要保证晶圆取放过程中的精准度,现有的晶圆运输臂,例如授权公告号为cn213124400u的专利公开的一种晶圆运输机械臂以及授权公告号为cn116504694b的专利公开的一种半导体晶圆输送设备,此类机械臂在高频重复运输晶圆的过程中,由于设备自身的疲劳,晶圆托盘对晶圆的取放精度会不断下降,导致在输送晶圆的过程中,无法精确的将晶圆输送至工位上。
技术实现思路
1、为了克服上述的技术问题,本发明的目的在于提供超洁净双柔性快速精确叠合的四指机器人,以解决现有技术中,机械臂在高频次的重复运输过程中,由于设备自身的疲劳,晶圆托盘对晶圆的取放精度会不断下降,导致晶圆在输送的过程中无法精确的将晶圆输送至工位上的问题。
2、本发明的目的可以通过以下技术方案实现:
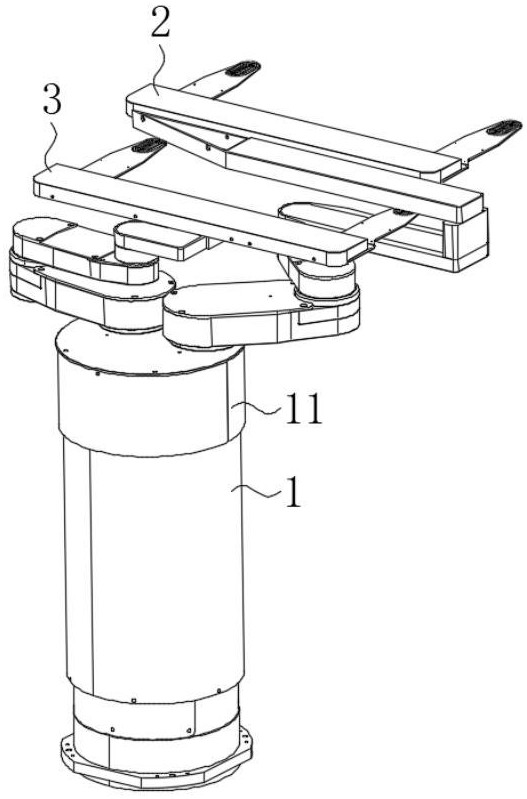
3、具体是提供一个超洁净双柔性快速精确叠合的四指机器人,包括机构底座,所述机构底座的顶面连接有第一机械臂和第二机械臂;所述机构底座控制第一机械臂和第二机械臂取放晶圆的同时采集晶圆的吸附点,根据晶圆的吸附点校准第一机械臂和第二机械臂的位移量。
4、作为本发明进一步的方案:所述第一机械臂包括第一大臂,第一大臂的顶面一端转动连接有第一小臂,第一小臂的顶面远离第一大臂的一端转动连接有第一折叠臂,第一折叠臂的顶面远离第一小臂的一端固定连接有第一悬臂,第一悬臂的底面两端固定连接有第一晶圆托盘。
5、作为本发明进一步的方案:所述第二机械臂包括第二大臂,第二大臂的顶面一端转动连接有第二小臂,第二小臂的顶面远离第二大臂的一端转动连接有第二折叠臂,第二折叠臂的顶面远离第二小臂的一端固定连接有第二悬臂,第二悬臂的底面两端固定连接有第二晶圆托盘。
6、作为本发明进一步的方案:所述第一晶圆托盘和第二晶圆托盘的顶面均设有晶圆吸盘。
7、作为本发明进一步的方案:所述第一晶圆托盘和第二晶圆托盘的顶面靠近晶圆吸盘的一侧位置设有光敏感应器。
8、作为本发明进一步的方案:所述第一大臂的底面固定连接有第一转轴,第二大臂的底面固定连接有第二转轴,机构底座的内腔顶端靠近第一转轴和第二转轴的中间位置设有定位块,第一转轴和第二转轴的侧面靠近定位块的位置固定连接有停止块。
9、作为本发明进一步的方案:所述定位块为电磁铁,停止块为磁铁,且停止块与定位块的接触面的磁极相反。
10、作为本发明进一步的方案:所述第一机械臂和第二机械臂上均设有若干组校准环,校准环的内侧固定连接有阻挡块,第一机械臂和第二机械臂上固定连接有与阻挡块相对应的限位块,校准环的侧面连接有液压缸。
11、作为本发明进一步的方案:所述机构底座上还装载有控制模块,控制模块以晶圆吸盘的顶面中心位置为原点建立直角坐标系。
12、作为本发明进一步的方案:所述控制模块通过液压缸控制校准环,预设阻挡块的初始位置;
13、所述机构底座控制第一机械臂和第二机械臂吸附晶圆后,控制模块通过光敏感应器采集晶圆的圆心坐标点,基于圆心坐标点和坐标原点的位置,控制模块使用校准环校准第一机械臂和第二机械臂的位移量,使得晶圆的圆心坐标点与坐标原点重合。
14、本发明的有益效果:
15、1、本发明中,在第一机械臂和第二机械臂取放晶圆的过程中,机构底座控制第一机械臂和第二机械臂采集晶圆的吸附点,根据晶圆的吸附点校准第一机械臂和第二机械臂的位移量,保证第一机械臂和第二机械臂每次都能精确的移动至晶圆的底面,同时也能将晶圆精确的放入另一个工位上,实现了晶圆的精准输送。
16、2、本发明中,通过设置的定位块,在第一大臂或者第二大臂启动时,机构底座会关闭定位块的电路,使定位块产生的磁场消失,这样定位块就不会对停止块产生磁吸力,保证第一转轴和第二转轴可以正常转动,当第一大臂或者第二大臂取放晶圆后返回至初始的位置时,机构底座会打开定位块的电路,使定位块产生磁场,由于停止块与定位块的接触面的磁极相反,所以定位块和停止块之间会产生吸附力,保证第一大臂或者第二大臂停止时,位置精确。
17、3、本发明中,控制模块通过液压缸控制校准环,预设阻挡块的初始位置,来预设第一机械臂和第二机械臂上各个阻挡块的初始位置,保证晶圆吸盘在经过预设的位移量后可以精确的停止在晶圆的正下方,控制模块先通过光敏感应器采集晶圆的边缘任意三个点的坐标数据,然后根据这三个点的坐标数据计算出该晶圆的圆心坐标点,若圆心坐标点与坐标原点重合或者误差在设置的范围内,则说明第一机械臂和第二机械臂的位移量是精确的,阻挡块的位置不需要调整,若圆心坐标点与坐标原点的误差超出设置的范围,则说明第一机械臂和第二机械臂的位移量是不够精确的,此时控制模块根据晶圆的圆心坐标点来调整第一机械臂和第二机械臂上的阻挡块的位置,保证第一机械臂和第二机械臂在下次拿取晶圆时,圆心坐标点与坐标原点的误差在设置的范围内,这样就能够保证第一机械臂和第二机械臂取放晶圆的精确度。
技术特征:
1.超洁净双柔性快速精确叠合的四指机器人,其特征在于,包括:
2.根据权利要求1所述的超洁净双柔性快速精确叠合的四指机器人,其特征在于,所述第一机械臂(2)包括第一大臂(21),第一大臂(21)的顶面一端转动连接有第一小臂(22),第一小臂(22)的顶面远离第一大臂(21)的一端转动连接有第一折叠臂(23),第一折叠臂(23)的顶面远离第一小臂(22)的一端固定连接有第一悬臂(24),第一悬臂(24)的底面两端固定连接有第一晶圆托盘(25)。
3.根据权利要求2所述的超洁净双柔性快速精确叠合的四指机器人,其特征在于,所述第二机械臂(3)包括第二大臂(31),第二大臂(31)的顶面一端转动连接有第二小臂(32),第二小臂(32)的顶面远离第二大臂(31)的一端转动连接有第二折叠臂(33),第二折叠臂(33)的顶面远离第二小臂(32)的一端固定连接有第二悬臂(34),第二悬臂(34)的底面两端固定连接有第二晶圆托盘(35)。
4.根据权利要求3所述的超洁净双柔性快速精确叠合的四指机器人,其特征在于,所述第一晶圆托盘(25)和第二晶圆托盘(35)的顶面均设有晶圆吸盘(6)。
5.根据权利要求4所述的超洁净双柔性快速精确叠合的四指机器人,其特征在于,所述第一晶圆托盘(25)和第二晶圆托盘(35)的顶面靠近晶圆吸盘(6)的一侧位置设有光敏感应器。
6.根据权利要求3所述的超洁净双柔性快速精确叠合的四指机器人,其特征在于,所述第一大臂(21)的底面固定连接有第一转轴(211),第二大臂(31)的底面固定连接有第二转轴(311),机构底座(1)的内腔顶端靠近第一转轴(211)和第二转轴(311)的中间位置设有定位块(4),第一转轴(211)和第二转轴(311)的侧面靠近定位块(4)的位置固定连接有停止块(41)。
7.根据权利要求6所述的超洁净双柔性快速精确叠合的四指机器人,其特征在于,所述定位块(4)为电磁铁,停止块(41)为磁铁,且停止块(41)与定位块(4)的接触面的磁极相反。
8.根据权利要求5所述的超洁净双柔性快速精确叠合的四指机器人,其特征在于,所述第一机械臂(2)和第二机械臂(3)上均设有若干组校准环(5),校准环(5)的内侧固定连接有阻挡块(51),第一机械臂(2)和第二机械臂(3)上固定连接有与阻挡块(51)相对应的限位块(52),校准环(5)的侧面连接有液压缸(53)。
9.根据权利要求8所述的超洁净双柔性快速精确叠合的四指机器人,其特征在于,所述机构底座(1)上还装载有控制模块,控制模块以晶圆吸盘(6)的顶面中心位置为原点建立直角坐标系。
10.根据权利要求9所述的超洁净双柔性快速精确叠合的四指机器人,其特征在于,所述控制模块通过液压缸(53)控制校准环(5),预设阻挡块(51)的初始位置;
技术总结
本发明公开了超洁净双柔性快速精确叠合的四指机器人,涉及晶圆运输技术领域,包括机构底座,所述机构底座的顶面连接有第一机械臂和第二机械臂;所述机构底座控制第一机械臂和第二机械臂取放晶圆的同时采集晶圆的吸附点,根据晶圆的吸附点校准第一机械臂和第二机械臂的位移量;在第一机械臂和第二机械臂取放晶圆的过程中,机构底座控制第一机械臂和第二机械臂采集晶圆的吸附点,根据晶圆的吸附点校准第一机械臂和第二机械臂的位移量,保证第一机械臂和第二机械臂每次都能精确的移动至晶圆的底面,同时也能将晶圆精确的放入另一个工位上,实现了晶圆的精准输送。
技术研发人员:林坚,王彭,吴国明,王栋梁
受保护的技术使用者:泓浒(苏州)半导体科技有限公司
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!