一种寻找晶圆凹槽切口中心点的方法及系统与流程
本发明涉及半导体器件制造,尤其涉及一种寻找晶圆凹槽切口中心点的方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、晶圆定位技术是半导体制造领域中的关键技术之一,它确保离子束可以精确地注入晶圆的特定区域。在离子束注入过程中,机械手需频繁地在不同载盘上取放晶圆,这就要求有效解决可能出现的晶圆定位不精确、偏心以及缺口方向不一致等问题。
3、晶圆定位的精准性对于离子注入工艺至关重要,因为它直接关系到注入过程的均匀性和精确度,进而决定了最终产品的性能和制造良率。在离子注入过程中,任何定位上的偏差都可能导致注入的不均匀性。
4、现有技术中,对于晶圆的定位,往往采用以下方式:
5、(1)利用激光作为参考光源,结合光学识别系统来精确定位晶圆上的特征。但是,高精度激光发射器和相关的精密运动控制系统通常价格昂贵,增加成本。而且激光发射器的移动速度较慢,这可能会影响整体的加工速度。
6、(2)采取晶圆周向触抵的方式迫使其中心移动至与台面中心重合。这种方法通常涉及到使用机械装置接触晶圆的边缘,并通过施加轻微的压力来调整晶圆的位置,使其中心与定位台面的中心对齐。如果施加的压力过大,可能会导致晶圆弯曲或破裂;因此,需要逐点接触晶圆边缘,这可能会延长定位所需的时间,同时晶圆边缘的不规则性也可能会影响定位的准确性。
技术实现思路
1、为了解决上述问题,本发明提出了一种寻找晶圆凹槽(notch)切口中心点的方法及系统,能够确保晶圆定位的准确性,并且显著提高了生产过程中的定位质量和效率。
2、在一些实施方式中,采用如下技术方案:
3、一种寻找晶圆凹槽切口中心点的方法,包括:
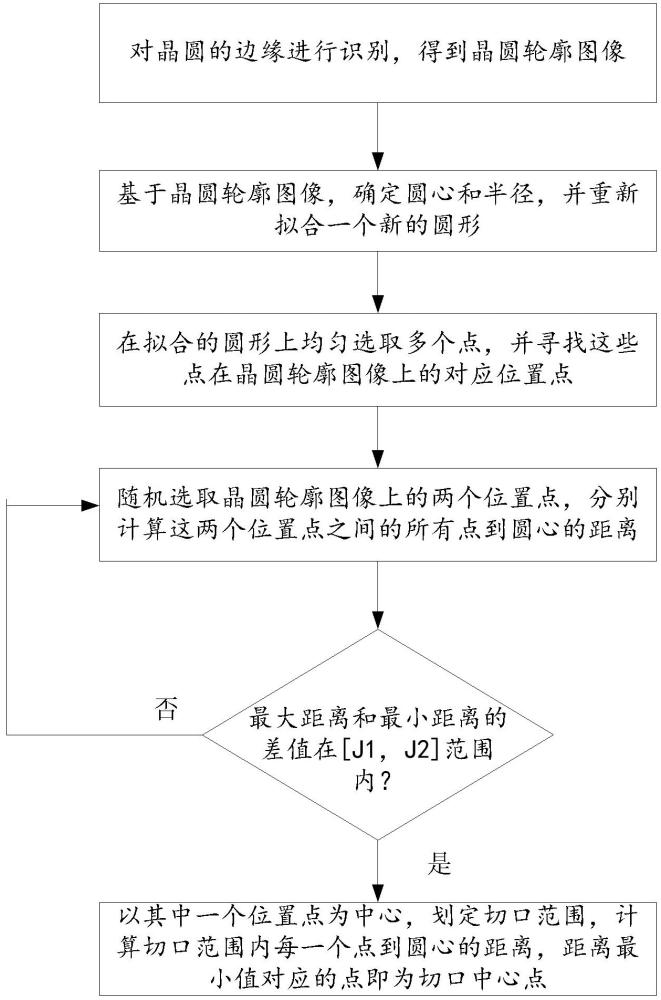
4、对晶圆的边缘进行识别,得到晶圆轮廓图像;
5、基于晶圆轮廓图像,确定圆心和半径,并重新拟合一个新的圆形;
6、在拟合的圆形上均匀选取多个点,并寻找这些点在晶圆轮廓图像上的对应位置点;
7、随机选取晶圆轮廓图像上的两个位置点,分别计算这两个位置点之间的所有点到圆心的距离,基于最大距离和最小距离的差值判断这两个位置点之间是否存在切口;
8、若存在切口,以所述的两个位置点中其中一个位置点为中心,划定切口范围,计算所述切口范围内每一个点到圆心的距离,距离最小值对应的点即为切口中心点。
9、若不存在切口,重新在晶圆轮廓图像上的其他位置选取两个位置点,重新判断这两个位置点之间是否存在切口。
10、作为进一步的方案,在拟合的圆形上均匀选取多个点,具体为:
11、在拟合的圆形上每隔设定距离g取一个点,所述距离g不大于晶圆凹槽的宽度,所述宽度指的是晶圆轮廓上缺失的圆弧部分长度。
12、作为进一步的方案,所述的寻找这些点在晶圆轮廓图像上的对应位置点,具体为:
13、将拟合的圆形划分为两两相对的四个区域,其中区域a和区域c上下相对,区域b和区域d左右相对;
14、假定拟合的圆形上的点为pi,晶圆轮廓图像上对应的位置点为fi,i=1,2,…,n,n表示点的数量;
15、如果pi位于区域a或区域c内,以pi为起点,沿着y方向寻找像素点,当找到像素点的灰度值大于设定阈值h时,该像素点即为pi对应的晶圆轮廓图像上的位置点;
16、如果pi位于区域b或区域d内,以pi为起点,沿着x方向寻找像素点,当找到像素点的灰度值大于设定阈值h时,该像素点即为pi对应的晶圆轮廓图像上的位置点。
17、作为进一步的方案,基于最大距离和最小距离的差值判断这两个位置点之间是否存在切口,具体为:
18、计算最大距离和最小距离的差值,如果所述差值在设定的阈值范围(j1,j2)内,则判断两个位置点之间存在切口;
19、否则,重新在其他位置选择两个位置点,分别计算这两个位置点之间的所有点到圆心的距离,基于最大距离和最小距离的差值判断这两个位置点之间是否存在切口。
20、作为进一步的方案,若存在切口,以所述的两个位置点中其中一个位置点为中心点,划定切口范围,具体为:
21、如果所述的其中一个位置点位于区域a或区域c内,则以该位置点为中心,沿x方向向两边分别延伸e/2距离,通过构造矩形确定延伸后的线段所对应的晶圆轮廓图像中的弧段,所述弧段即为切口范围;e不小于晶圆凹槽的宽度;
22、如果所述的其中一个位置点位于区域b或区域d内,则以该位置点为中心,沿y方向向两边分别延伸e/2距离,通过构造矩形确定延伸后的线段所对应的晶圆轮廓图像中的弧段,所述弧段即为切口范围。
23、作为进一步的方案,所述切口中心点为切口弧段的中点。
24、在另一些实施方式中,采用如下技术方案:
25、一种寻找晶圆凹槽切口中心点的系统,包括:
26、图像识别模块,用于对晶圆的边缘进行识别,得到晶圆轮廓图像;
27、圆形拟合模块,用于基于晶圆轮廓图像,确定圆心和半径,并重新拟合一个新的圆形;
28、切口判断模块,用于在拟合的圆形上均匀选取多个点,并寻找这些点在晶圆轮廓图像上的对应位置点;随机选取晶圆轮廓图像上的两个位置点,分别计算这两个位置点之间的所有点到圆心的距离,基于最大距离和最小距离的差值判断这两个位置点之间是否存在切口;
29、切口中心点确定模块,用于在存在切口时,以所述的两个位置点中其中一个位置点为中心,划定切口范围,计算所述切口范围内每一个点到圆心的距离,距离最小值对应的点即为切口中心点。
30、在另一些实施方式中,采用如下技术方案:
31、一种终端设备,其包括处理器和存储器,处理器用于实现指令;存储器用于存储多条指令,所述指令适于由处理器加载并执行上述方法的步骤。
32、在另一些实施方式中,采用如下技术方案:
33、一种计算机可读存储介质,其上存储有计算机程序/指令,该计算机程序/指令被处理器执行时实现上述方法的步骤。
34、与现有技术相比,本发明的有益效果是:
35、(1)本发明方法通过准确寻找切口中心点,能够实现对晶圆的高精准度定位;切口中心点的确定过程简单,无需复杂的操作和计算,能够显著提高生产过程中的定位质量和定位效率,从而提升离子注入的准确度和制备效率。
36、(2)本发明通过拟合新的标准圆形,与晶圆轮廓图像进行位置点的匹配,利用晶圆轮廓图像上位置点到圆心的距离,筛选出切口范围,然后基于切口范围内各点到圆心的距离最小值,确定切口中心点位置;整个过程无需复杂的对准过程,计算过程简单且易于实现,得到的切口中心点的位置准确可靠。
37、本发明的其他特征和附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本方面的实践了解到。
技术特征:
1.一种寻找晶圆凹槽切口中心点的方法,其特征在于,包括:
2.如权利要求1所述的一种寻找晶圆凹槽切口中心点的方法,其特征在于,若不存在切口,重新在晶圆轮廓图像上的其他位置选取两个位置点,重新判断这两个位置点之间是否存在切口。
3.如权利要求1所述的一种寻找晶圆凹槽切口中心点的方法,其特征在于,在拟合的圆形上均匀选取多个点,具体为:
4.如权利要求1所述的一种寻找晶圆凹槽切口中心点的方法,其特征在于,所述的寻找这些点在晶圆轮廓图像上的对应位置点,具体为:
5.如权利要求1所述的一种寻找晶圆凹槽切口中心点的方法,其特征在于,基于最大距离和最小距离的差值判断这两个位置点之间是否存在切口,具体为:
6.如权利要求1所述的一种寻找晶圆凹槽切口中心点的方法,其特征在于,若存在切口,以所述的两个位置点中其中一个位置点为中心点,划定切口范围,具体为:
7.如权利要求1所述的一种寻找晶圆凹槽切口中心点的方法,其特征在于,所述切口中心点为切口弧段的中点。
8.一种寻找晶圆凹槽切口中心点的系统,其特征在于,包括:
9.一种终端设备,其包括处理器和存储器,处理器用于实现指令;存储器用于存储多条指令,其特征在于,所述指令适于由处理器加载并执行权利要求1-7任一项所述方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序/指令,其特征在于,该计算机程序/指令被处理器执行时实现权利要求1-7任一项所述方法的步骤。
技术总结
本发明涉及半导体器件制造技术领域,具体公开了一种寻找晶圆凹槽切口中心点的方法及系统,方法包括:基于晶圆轮廓图像,确定圆心和半径,并重新拟合一个新的圆形;在拟合的圆形上均匀选取多个点,并寻找这些点在晶圆轮廓图像上的对应位置点;随机选取晶圆轮廓图像上的两个位置点,分别计算这两个位置点之间的所有点到圆心的距离,基于最大距离和最小距离的差值判断这两个位置点之间是否存在切口;若存在切口,以两个位置点中其中一个位置点为中心,划定切口范围,计算切口范围内每一个点到圆心的距离,距离最小值对应的点即为切口中心点。本发明能够显著提高生产过程中的定位质量和定位效率,从而提升离子注入的准确度和制备效率。
技术研发人员:李更兰,杨晓琳
受保护的技术使用者:艾恩(山东)半导体科技有限公司
技术研发日:
技术公布日:2024/10/21
- 还没有人留言评论。精彩留言会获得点赞!