一种基于视觉定位的晶圆对位方法及控制系统与流程
本发明涉及半导体芯片制造,尤其涉及一种基于视觉定位的晶圆对位方法及控制系统。
背景技术:
1、在半导体设备中,晶圆是制造半导体芯片的一种基本材料,表面需要进行uv膜贴膜处理,此薄膜可以对晶圆表面起到良好的保护作用。而在进行贴膜之前,晶圆在置于平台上后,晶圆的圆心与平台的中心会出现偏离,故需要确定晶圆的位置,并对晶圆进行对位,以确保贴膜的准确性。
2、但是,现有技术的晶圆对位装置精准度较低,对位过程较为繁琐,耗时较长,导致晶圆的生产效率较低。
技术实现思路
1、本发明旨在解决上述现有技术中晶圆对位的精准度较低,对位过程较为繁琐,耗时较长,导致晶圆的生产效率较低的问题,提供一种基于视觉定位的晶圆对位方法及控制系统。
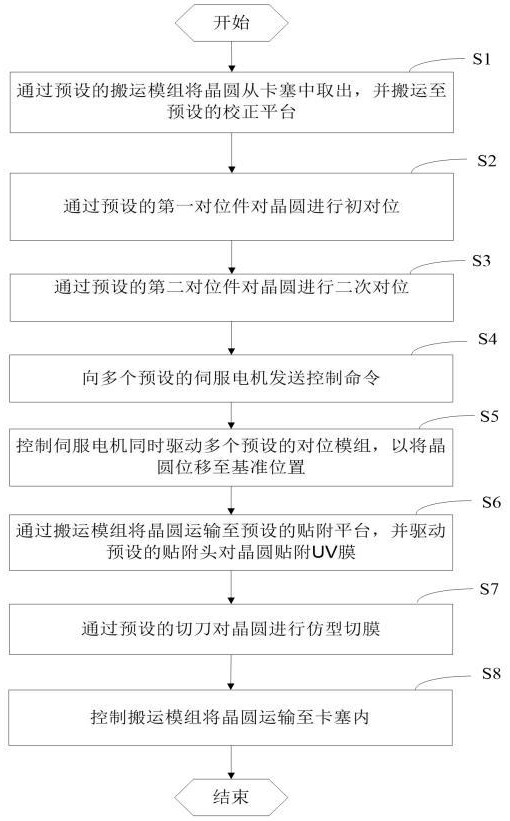
2、本发明提供一种基于视觉定位的晶圆对位方法,包括以下步骤:
3、通过预设的搬运模组将晶圆从卡塞中取出,并搬运至预设的校正平台;
4、通过预设的第一对位件对所述晶圆进行初对位;
5、通过预设的第二对位件对所述晶圆进行二次对位;
6、向多个预设的伺服电机发送控制命令;
7、控制所述伺服电机同时驱动多个预设的对位模组,以将所述晶圆位移至基准位置;
8、通过所述搬运模组将所述晶圆运输至预设的贴附平台,并驱动预设的贴附头对所述晶圆贴附uv膜;
9、通过预设的切刀对所述晶圆进行仿型切膜;
10、控制所述搬运模组将所述晶圆运输至所述卡塞内。
11、进一步的,所述晶圆设有至少一个缺口,用于与所述第一对位件和所述第二对位件对位。
12、进一步的,所述通过预设的第一对位件对所述晶圆进行初对位的步骤中,包括:
13、通过所述第一对位件获取所述晶圆的轮廓图像;
14、通过多个预设的处理器将所述轮廓图像进行图像预处理。
15、进一步的,所述通过多个预设的处理器将所述轮廓图像进行图像预处理的步骤中,包括:
16、将所述轮廓图像的焦点和亮度进行可视化处理,并与预设的正常图像作对比;
17、将所述焦点和所述亮度调整至与所述正常图像相同;
18、对所述轮廓图像进行锐化处理。
19、进一步的,所述对所述轮廓图像进行锐化处理的步骤后,包括:
20、对所述轮廓图像进行初步校正;
21、对所述轮廓图像进行二次校正。
22、进一步的,所述对所述轮廓图像进行二次校正的步骤之后,包括:
23、判断所述轮廓图像是否包含所述缺口;
24、若是,则控制所述第二对位件进行二次对位;
25、若否,则根据所述轮廓图像的坐标数据计算所述第一对位件的位移方向和移动量,直至所述轮廓图像包含所述缺口。
26、进一步的,所述通过预设的第二对位件对所述晶圆进行二次对位的步骤中,包括:
27、识别所述缺口的位置信息;
28、将所述缺口与预设的贴附基准点进行校正。
29、进一步的,所述将所述缺口与预设的贴附基准点进行校正的步骤中,包括:
30、根据所述位置信息和所述贴附基准点计算补正量和旋转角度。
31、进一步的,所述控制所述伺服电机同时驱动多个预设的对位模组的步骤中,包括:
32、驱动所述对位模组位移所述补正量,并旋转所述旋转角度。
33、进一步的,所述通过预设的切刀对所述晶圆进行仿型切膜的步骤中,包括:
34、控制所述切刀由所述缺口切入,并对所述晶圆进行仿型切割。
35、本发明还提供一种基于视觉定位的晶圆对位控制系统,包括卡塞、搬运模组、校正平台、第一对位件、第二对位件、贴附平台、贴附头、主控制器、视觉控制器、显示屏、多个处理器、伺服电机和对位模组;所述主控制器与所述第一对位件和所述第二对位件电连接;所述处理器分别与所述第一对位件和所述第二对位件通信连接;所述卡塞设于所述搬运模组一侧;所述贴附头位于所述贴附平台一侧,并与所述主控制器电连接;所述主控制器与所述显示屏电连接;所述视觉控制器与所述第一对位件和所述第二对位件电连接,并用于控制所述第一对位件和所述第二对位件;所述对位模组设有对位感应器,并与所述伺服电机电连接,用于对所述对位模组的运动位置进行检测。
36、本发明提供了一种基于视觉定位的晶圆对位方法及控制系统,具有以下有益效果:
37、通过第一对位件和第二对位件对晶圆进行初对位和二次对位,能够实现高精度对位,且能够便于后续贴膜和切膜的进行,且能够同时驱动多个伺服电机将晶圆位移至基准位置,能够大幅度地提高晶圆的生产效率。能够在光照不足、光照较强或晶圆表面反射较强的情况下,对晶圆的轮廓图像进行调节,能够提高轮廓图像质量,且对轮廓图像进行初步校正和二次校正,进而提高了晶圆对位的精确度。
技术特征:
1.一种基于视觉定位的晶圆对位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于视觉定位的晶圆对位方法,其特征在于,所述晶圆设有至少一个缺口,用于与所述第一对位件和所述第二对位件对位。
3.根据权利要求2所述的基于视觉定位的晶圆对位方法,其特征在于,所述通过预设的第一对位件对所述晶圆进行初对位的步骤中,包括:
4.根据权利要求3所述的基于视觉定位的晶圆对位方法,其特征在于,所述通过多个预设的处理器将所述轮廓图像进行图像预处理的步骤中,包括:
5.根据权利要求4所述的基于视觉定位的晶圆对位方法,其特征在于,所述对所述轮廓图像进行锐化处理的步骤后,包括:
6.根据权利要求5所述的基于视觉定位的晶圆对位方法,其特征在于,所述对所述轮廓图像进行二次校正的步骤之后,包括:
7.根据权利要求2所述的基于视觉定位的晶圆对位方法,其特征在于,所述通过预设的第二对位件对所述晶圆进行二次对位的步骤中,包括:
8.根据权利要求7所述的基于视觉定位的晶圆对位方法,其特征在于,所述将所述缺口与预设的贴附基准点进行校正的步骤中,包括:
9.根据权利要求8所述的基于视觉定位的晶圆对位方法,其特征在于,所述控制所述伺服电机同时驱动多个预设的对位模组的步骤中,包括:
10.根据权利要求2所述的基于视觉定位的晶圆对位方法,其特征在于,所述通过预设的切刀对所述晶圆进行仿型切膜的步骤中,包括:
11.一种基于视觉定位的晶圆对位控制系统,其特征在于,包括卡塞、搬运模组、校正平台、第一对位件、第二对位件、贴附平台、贴附头、主控制器、视觉控制器、显示屏、多个处理器、伺服电机和对位模组;
技术总结
本发明提供一种基于视觉定位的晶圆对位方法及控制系统,通过搬运模组将晶圆从卡塞中取出,并搬运至校正平台;通过第一对位件对晶圆进行初对位;通过第二对位件对晶圆进行二次对位;向多个伺服电机发送控制命令;控制伺服电机同时驱动多个对位模组,以将晶圆位移至基准位置;通过搬运模组将晶圆运输至贴附平台;驱动贴附头对晶圆贴附UV膜;通过切刀对晶圆进行仿型切膜;控制搬运模组将晶圆运输至卡塞内。本发明通过第一对位件和第二对位件对晶圆进行初对位和二次对位,能够实现高精度对位,且能够便于后续贴膜和切膜的进行,且能够同时驱动多个伺服电机将晶圆位移至基准位置,能够大幅度地提高晶圆的生产效率。
技术研发人员:高军鹏,陈辉,黄瑞瑶
受保护的技术使用者:深圳市易天自动化设备股份有限公司
技术研发日:
技术公布日:2025/1/16
- 还没有人留言评论。精彩留言会获得点赞!