上下料复合机器人的制作方法
本技术涉及机器人,具体而言,涉及一种上下料复合机器人。
背景技术:
1、目前,用于盛放晶圆的料盒主要的周转方式为人工周转,人工将料盒放置在手推式物料架上,人工推动手推式物料架在不同工位间移动,这种方式存在以下问题:晶圆的价值极高,而人工搬运容易损害晶圆,导致周转成本较高;人工搬运过程中较费力,且效率较低;人工运输比较依赖经验度,对工人专业要求较高,当前人工的招工、培训上岗的周期较长,不利于产业的大规模发展。
技术实现思路
1、本实用新型的目的在于提供一种上下料复合机器人,以缓解现有技术中的晶圆料盒上下料方式存在的转运成本高、费时费力、难以大规模发展的技术问题。
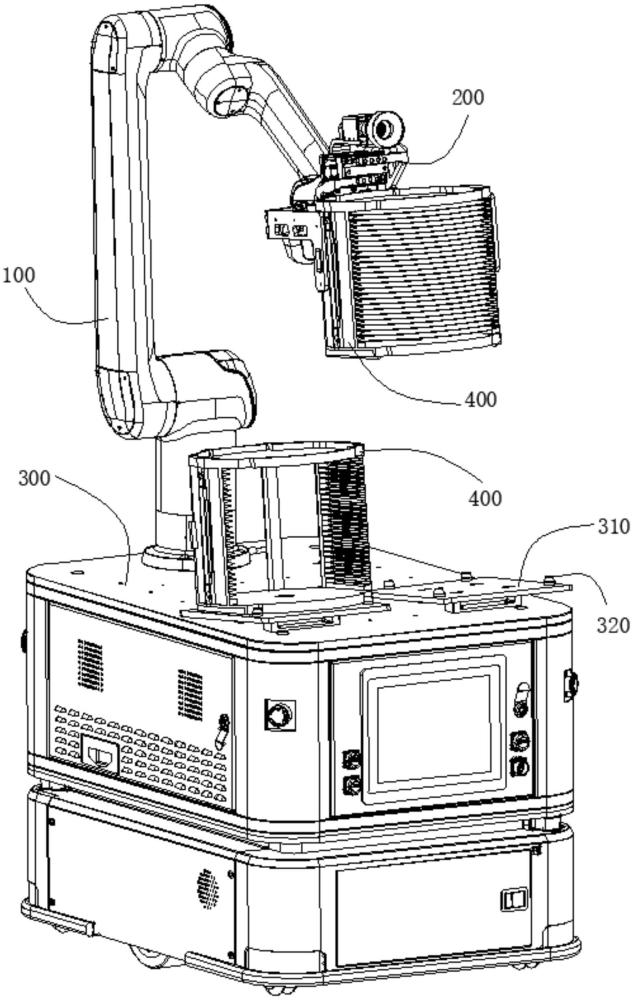
2、本实用新型提供的上下料复合机器人,包括机械臂和夹持机构。
3、所述夹持机构安装于所述机械臂,所述机械臂能够驱动所述夹持机构移动至目标位置;所述夹持机构包括夹爪和第一导向结构,所述夹爪包括第一动力源和两组相对设置的夹持件,所述第一动力源与所述夹持件连接,用于驱动两组所述夹持件朝相互靠近或相互背离的方向移动,以夹紧或释放料盒;所述第一导向结构与所述夹持件配合,所述第一导向结构的导引方向与所述夹持件的移动方向一致,且所述第一导向结构能够限制所述夹持件沿垂直于所述夹持件的移动方向的移动。
4、优选地,作为一种可实施方式,所述夹持件的移动方向为水平方向。
5、优选地,作为一种可实施方式,所述夹持件包括手指和夹持板,所述手指与所述第一动力源连接,所述夹持板与所述第一导向结构连接,所述夹持板与所述手指通过第二导向结构连接,所述夹持板用于夹紧所述料盒;所述第二导向结构的导引方向与所述手指的移动方向垂直,且所述第二导向结构能够限制所述夹持板沿所述手指的移动方向的移动。
6、优选地,作为一种可实施方式,所述第二导向结构包括开设于所述手指的腰形孔、以及安装于所述夹持板的第一销钉,或,所述第二导向结构包括开设于所述夹持板的腰形孔、以及安装于所述手指的第一销钉。
7、所述腰形孔的长度方向与所述夹持件的移动方向垂直,所述第一销钉与所述腰形孔配合且能够沿所述腰形孔的长度方向移动。
8、优选地,作为一种可实施方式,所述上下料复合机器人还包括移动底盘,所述移动底盘包括第二动力源,所述第二动力源能够驱动所述移动底盘在若干周转工位之间移动,所述机械臂安装于所述移动底盘。
9、优选地,作为一种可实施方式,所述移动底盘设有用于暂存所述料盒的料盒暂存区。
10、所述料盒暂存区至少为两个;和/或,所述料盒暂存区设有倾斜安装于所述移动底盘的倾斜固定板,所述倾斜固定板的顶部设有定位块,所述倾斜固定板用于放置所述料盒,所述定位块用于对所述料盒定位。
11、优选地,作为一种可实施方式,所述夹持机构安装有检测元件,所述检测元件用于检测目标位置处的所述料盒;所述检测元件与所述第一动力源通讯连接,用于在目标位置处存在所述料盒的状态下,控制所述第一动力源驱动所述夹持件朝相互靠近的方向移动;
12、和/或,所述夹持机构安装有视觉定位组件,所述视觉定位组件用于识别与目标位置相对固定的特征元素;所述视觉定位组件与所述机械臂通讯连接,用于控制所述机械臂驱动所述夹持机构以特定姿态移动至目标位置。
13、优选地,作为一种可实施方式,所述夹持件与所述料盒两者中的其中一者安装有第二销钉,另一者设有定位槽;所述第二销钉与所述定位槽配合,用于使所述料盒悬挂于所述夹持件。
14、优选地,作为一种可实施方式,所述夹持件与所述料盒两者中的其中一者安装有第三销钉,另一者设有防转槽;所述第三销钉与所述防转槽配合,用于阻止所述料盒绕所述第二销钉转动。
15、优选地,作为一种可实施方式,所述定位槽设于料盒的侧壁,所述定位槽具有u形槽部和v形槽部,所述v形槽部位于所述u形槽部的上方,所述u形槽部的u形开口与所述v形槽部的v形开口相通;
16、和/或,所述防转槽呈矩形,且所述防转槽的长度方向竖直设置。
17、与现有技术相比,本实用新型的有益效果在于:
18、本实用新型提供的上下料复合机器人,能够通过控制机械臂动作,利用机械臂将夹持机构送至目标位置(包括存料位置和供料位置)。在下料时,可控制机械臂将夹持机构送至供料位置,并控制夹爪的第一动力源动作,驱动两组夹持件朝相互靠近的方向移动,以夹紧供料位置处的空料盒;之后,控制机械臂将夹有空料盒的夹持机构送至存料位置,并控制夹爪的第一动力源动作,驱动两组夹持件朝相互背离的方向移动,以释放空料盒,将空料盒放至空闲的存料位置处,完成下料。在上料时,可控制机械臂将夹持机构送至带载的存料位置(即存在盛有晶圆或其他物料的带料料盒的存料位置),并控制夹爪的第一动力源动作,驱动两组夹持件朝相互靠近的方向移动,以夹紧存料位置处的带料料盒;之后,控制机械臂将夹有带料料盒的夹持机构送至供料位置,并控制夹爪的第一动力源动作,驱动两组夹持件朝相互背离的方向移动,以释放带料料盒,将带料料盒放至空的供料位置处,完成上料。
19、因此,本实用新型提供的上下料复位机器人,能够实现自动上下料工作,无需人工搬运料盒,可大大降低晶圆或其他物料被损坏的风险,降低周转成本;可节省人力,且效率较高;此外,还可降低对工人的专业要求,有利于大规模发展。
20、需要说明的是,因第一导向结构对夹持件的导引方向与第一动力源驱动夹持件移动的方向一致,故第一导向结构不会影响夹持件的正常夹紧和释放动作,且第一导向结构能够对夹持件形成一定的限位支撑效果,可提高夹持机构的结构可靠性,使得夹爪的夹持件与第一动力源之间不易产生其他非驱动方向的相互作用力,可提高夹爪的动作平稳性,延长夹爪的工作寿命。
技术特征:
1.一种上下料复合机器人,其特征在于,包括机械臂和夹持机构;
2.根据权利要求1所述的上下料复合机器人,其特征在于,所述夹持件的移动方向为水平方向。
3.根据权利要求1所述的上下料复合机器人,其特征在于,所述夹持件包括手指和夹持板,所述手指与所述第一动力源连接,所述夹持板与所述第一导向结构连接,所述夹持板与所述手指通过第二导向结构连接,所述夹持板用于夹紧所述料盒;所述第二导向结构的导引方向与所述手指的移动方向垂直,且所述第二导向结构能够限制所述夹持板沿所述手指的移动方向的移动。
4.根据权利要求3所述的上下料复合机器人,其特征在于,所述第二导向结构包括开设于所述手指的腰形孔、以及安装于所述夹持板的第一销钉,或,所述第二导向结构包括开设于所述夹持板的腰形孔、以及安装于所述手指的第一销钉;
5.根据权利要求1-4任一项所述的上下料复合机器人,其特征在于,所述上下料复合机器人还包括移动底盘,所述移动底盘包括第二动力源,所述第二动力源能够驱动所述移动底盘在若干周转工位之间移动,所述机械臂安装于所述移动底盘。
6.根据权利要求5所述的上下料复合机器人,其特征在于,所述移动底盘设有用于暂存所述料盒的料盒暂存区;
7.根据权利要求1-4任一项所述的上下料复合机器人,其特征在于,所述夹持机构安装有检测元件,所述检测元件用于检测目标位置处的所述料盒;所述检测元件与所述第一动力源通讯连接,用于在目标位置处存在所述料盒的状态下,控制所述第一动力源驱动所述夹持件朝相互靠近的方向移动;
8.根据权利要求1-4任一项所述的上下料复合机器人,其特征在于,所述夹持件与所述料盒两者中的其中一者安装有第二销钉,另一者设有定位槽;所述第二销钉与所述定位槽配合,用于使所述料盒悬挂于所述夹持件。
9.根据权利要求8所述的上下料复合机器人,其特征在于,所述夹持件与所述料盒两者中的其中一者安装有第三销钉,另一者设有防转槽;所述第三销钉与所述防转槽配合,用于阻止所述料盒绕所述第二销钉转动。
10.根据权利要求9所述的上下料复合机器人,其特征在于,所述定位槽设于料盒的侧壁,所述定位槽具有u形槽部和v形槽部,所述v形槽部位于所述u形槽部的上方,所述u形槽部的u形开口与所述v形槽部的v形开口相通;
技术总结
本技术涉及机器人技术领域,具体而言,涉及一种上下料复合机器人。上下料复合机器人包括机械臂和夹持机构;夹持机构安装于机械臂,夹持机构包括夹爪和第一导向结构,夹爪包括第一动力源和两组相对设置的夹持件,第一动力源与夹持件连接,用于驱动两组夹持件朝相互靠近或相互背离的方向移动;第一导向结构与夹持件配合,第一导向结构的导引方向与夹持件的移动方向一致,且第一导向结构能够限制夹持件沿垂直于夹持件的移动方向的移动。本技术提供的上下料复合机器人,可降低周转成本,节省人力,且效率较高;还可降低对工人的专业要求,有利于大规模发展;此外,夹持机构的结构可靠性强,夹爪的动作平稳,工作寿命较长。
技术研发人员:赵志强,陈兆芃,黎田,王争,闫以勋,方凯,刘江浩
受保护的技术使用者:北京思灵机器人科技有限责任公司
技术研发日:20240104
技术公布日:2025/1/28
- 还没有人留言评论。精彩留言会获得点赞!