一种具有氮气流量监测功能的半导体晶圆搬运机器人的制作方法
本技术属于机器人,具体的说,涉及一种具有氮气流量监测功能的半导体晶圆搬运机器人。
背景技术:
1、随着半导体产业的快速发展,晶圆作为半导体产品的基础材料,其制造过程对环境的洁净度和气体的控制要求越来越高,氮气作为一种常用的保护气体,在晶圆制造过程中被广泛应用,因此,对氮气流量进行精确监测和控制对于保证晶圆质量和生产效率至关重要。
2、在半导体制造过程中,氮气通常用于创造一个无氧或低氧环境,以防止晶圆受到氧化,但现有的半导体晶圆搬运机器人可能无法监测氮气的流量并且无法及时释放氮气,容易存在氮气供应不足或中断的风险,这会导致晶圆暴露在空气中,从而增加氧化的风险,甚至可能引发安全问题。
3、有鉴于此,特提出本申请。
技术实现思路
1、本实用新型为了解决上述的技术问题,而提供了一种能够监测氮气流量并且及时释放氮气的装置。
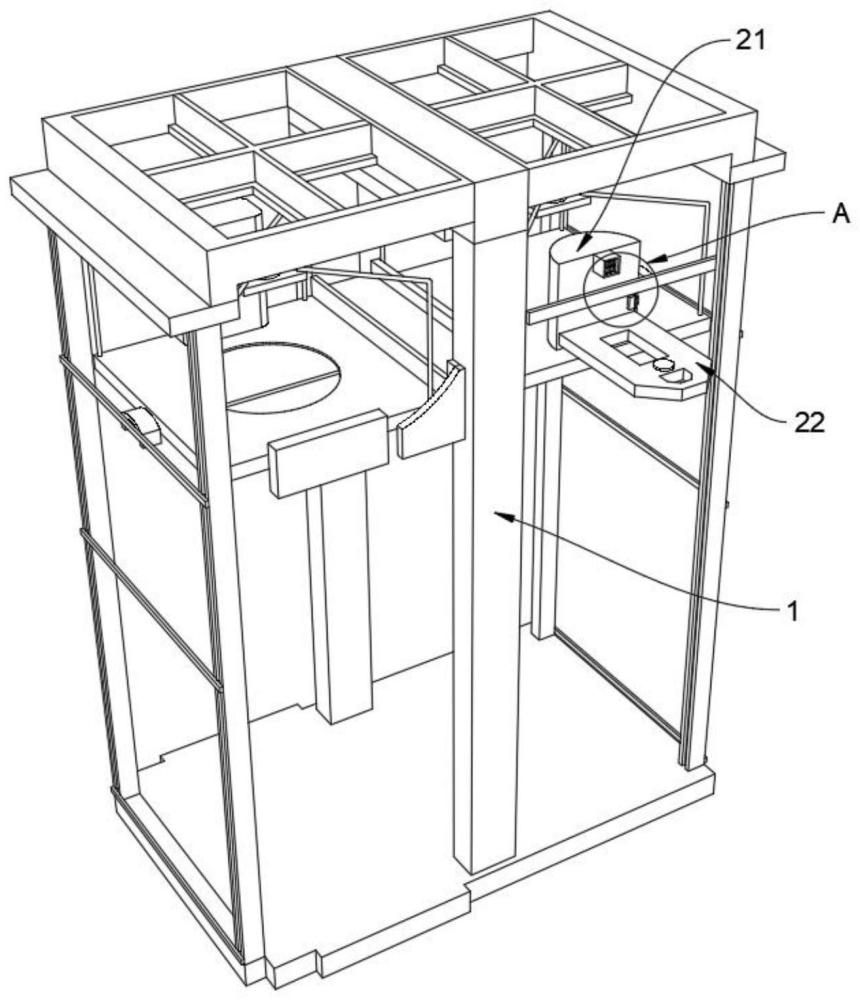
2、为解决上述技术问题,本实用新型提供的一种具有氮气流量监测功能的半导体晶圆搬运机器人,包括半导体晶圆搬运机器人本体、防护壳、出气口、氮气传感器、氮气罐,叉臂以及开合组件,所述氮气传感器用于检测晶圆盒氮气浓度,所述氮气罐用于储存氮气,所述开合组件用于控制出气口的开合,所述开合组件包括设置在出气口内部的液压杆,所述液压杆的伸缩端连接有第一齿条,所述防护壳的内壁连接有转杆,所述转杆的外壁安装有第一齿轮,所述第一齿轮与第一齿条相啮合连接,所述转杆的外壁安装有连接杆,所述连接杆的外壁连接有半圆形隔板。
3、进一步的,所述防护壳的内部转动连接有多个支撑杆,所述支撑杆的外壁安装有两个连接板,所述支撑杆的外壁连接有第二齿轮,所述第二齿轮位于两个连接板之间,所述防护壳的内部设置有电动伸缩杆,所述电动伸缩杆连接有与多个第二齿轮相啮合连接的第二齿条。
4、进一步的,所述防护壳的内壁安装有固定板,所述电动伸缩杆与固定板的外壁相连接,所述固定板与防护壳之间连接有多个螺栓。
5、进一步的,所述防护壳的内部安装有两个套杆,所述套杆的内壁滑动连接有套筒,所述套筒远离套杆的一端与第一齿条的底端相连接。
6、进一步的,所述防护壳的内壁开设有两个弧形滑槽,两个所述半圆形隔板的外壁均连接有插杆,所述插杆远离半圆形隔板的一端延伸至弧形滑槽的内部。
7、进一步的,所述插杆远离半圆形隔板的一端连接有滚珠,所述滚珠位于弧形滑槽的内部,所述滚珠与弧形滑槽相滑动连接。
8、进一步的,所述半圆形隔板与连接杆之间连接有固定环,所述固定环与半圆形隔板之间螺纹连接有螺钉,所述连接杆位于固定环的内部,所述固定环与半圆形隔板相抵。
9、进一步的,所述防护壳的内壁安装有固定块,所述液压杆安装在固定块的顶部,所述固定块位于两个套筒之间。
10、采用上述技术方案后,本实用新型与现有技术相比具有以下有益效果。
11、1、本实用新型中,通过氮气传感器实时监测晶圆盒氮气浓度,当氮气浓度不足时发送电信号至单片机,利用单片机控制液压杆运作,使两个半圆形隔板远离出气口后,即可使氮气从出气口飘向晶圆盒,进而降低了晶圆因氮气不足而氧化的风险。
12、2、本实用新型中,单片机同时控制电动伸缩杆运行,电动伸缩杆带动第二齿条移动,进而带动多个第二齿轮与支撑杆一同转动,使多个连接板形成左右摆动的效果,多个连接板摆动对防护壳内部的氮气进行分流,使氮气向外飘出时更加均匀,可以提高混合气体的稳定性和安全性。
技术特征:
1.一种具有氮气流量监测功能的半导体晶圆搬运机器人,包括:
2.根据权利要求1所述的一种具有氮气流量监测功能的半导体晶圆搬运机器人,其特征在于,所述防护壳(4)的内部转动连接有多个支撑杆(6),所述支撑杆(6)的外壁安装有两个连接板(7),所述支撑杆(6)的外壁连接有第二齿轮(8),所述第二齿轮(8)位于两个连接板(7)之间,所述防护壳(4)的内部设置有电动伸缩杆(9),所述电动伸缩杆(9)连接有与多个第二齿轮(8)相啮合连接的第二齿条(10)。
3.根据权利要求2所述的一种具有氮气流量监测功能的半导体晶圆搬运机器人,其特征在于,所述防护壳(4)的内壁安装有固定板(16),所述电动伸缩杆(9)与固定板(16)的外壁相连接,所述固定板(16)与防护壳(4)之间连接有多个螺栓(17)。
4.根据权利要求1所述的一种具有氮气流量监测功能的半导体晶圆搬运机器人,其特征在于,所述防护壳(4)的内部安装有两个套杆(13),所述套杆(13)的内壁滑动连接有套筒(12),所述套筒(12)远离套杆(13)的一端与第一齿条(202)的底端相连接。
5.根据权利要求1所述的一种具有氮气流量监测功能的半导体晶圆搬运机器人,其特征在于,所述防护壳(4)的内壁开设有两个弧形滑槽(18),两个所述半圆形隔板(206)的外壁均连接有插杆(19),所述插杆(19)远离半圆形隔板(206)的一端延伸至弧形滑槽(18)的内部。
6.根据权利要求5所述的一种具有氮气流量监测功能的半导体晶圆搬运机器人,其特征在于,所述插杆(19)远离半圆形隔板(206)的一端连接有滚珠(20),所述滚珠(20)位于弧形滑槽(18)的内部,所述滚珠(20)与弧形滑槽(18)相滑动连接。
7.根据权利要求1所述的一种具有氮气流量监测功能的半导体晶圆搬运机器人,其特征在于,所述半圆形隔板(206)与连接杆(205)之间连接有固定环(14),所述固定环(14)与半圆形隔板(206)之间螺纹连接有螺钉(15),所述连接杆(205)位于固定环(14)的内部,所述固定环(14)与半圆形隔板(206)相抵。
8.根据权利要求1所述的一种具有氮气流量监测功能的半导体晶圆搬运机器人,其特征在于,所述防护壳(4)的内壁安装有固定块(11),所述液压杆(201)安装在固定块(11)的顶部,所述固定块(11)位于两个套筒(12)之间。
技术总结
本技术公开了一种具有氮气流量监测功能的半导体晶圆搬运机器人,涉及机器人技术领域,包括半导体晶圆搬运机器人本体、防护壳、出气口、氮气传感器、氮气罐,叉臂以及开合组件,所述氮气传感器用于检测晶圆盒氮气浓度,所述氮气罐用于储存氮气,所述开合组件用于控制出气口的开合,所述开合组件包括设置在出气口内部的液压杆,所述液压杆的伸缩端连接有第一齿条,所述防护壳的内壁连接有转杆。本技术中,通过氮气传感器实时监测晶圆盒氮气浓度,当氮气浓度不足时发送电信号至单片机,利用单片机控制液压杆运作,使两个半圆形隔板远离出气口后,即可使氮气从出气口飘向晶圆盒,进而降低了晶圆因氮气不足而氧化的风险。
技术研发人员:邹春阳,侍素妹
受保护的技术使用者:艾媛永旭半导体(江苏)有限公司
技术研发日:20240325
技术公布日:2025/2/5
- 还没有人留言评论。精彩留言会获得点赞!