涂覆机器回收系统的制作方法
[0001]
本申请涉及导线涂覆机器回收技术领域,特别是涉及一种涂覆机器回收系统。
背景技术:
[0002]
架空线路是我国电力传输的主要形式,架空线路的安全稳定运行直接影响到电网的安全性和供电的可靠性,利用架空线路绝缘涂覆机器对架空线路进行绝缘包裹可以解决架空线路裸导线腐蚀快、使用年限短和抵御外破能力弱等问题,还可以节约线路维护费用。然而涂覆机器作业场景较为复杂,容易出现故障停机或是添加涂覆材料需要对涂覆机器进行回收。
[0003]
现有方法中,通常是采用人在地面利用牵引绳将涂覆机器拉至电杆附近再拆卸维修,然而人为在地面进行牵引作业时通常会因为受到地理因素的影响,出现涂覆机器回收困难的问题。
技术实现要素:
[0004]
基于此,有必要针对上述技术问题,提供一种能够在涂覆机器作业时出现故障时,能够对涂覆机器进行快速回收的涂覆机器回收系统。
[0005]
一种涂覆机器回收系统,包括:
[0006]
牵引机构,设置于架空导线上,用于连接牵引待回收的涂覆机器;
[0007]
绕线机构,设置于地面,用于对所述牵引机构提供牵引动力;
[0008]
连接机构,用于将所述牵引机构与所述绕线机构进行连接;
[0009]
其中,所述牵引机构包括:
[0010]
连接装置,用于对所述待回收的涂覆机器进行连接;
[0011]
移动装置,用于带动所述牵引机构在架空导线上移动;
[0012]
第一通讯装置,用于接收第一控制指令并将所述第一控制指令传递至第一控制装置;
[0013]
第一控制装置,用于根据所述第一通讯装置传递的所述第一控制指令,对所述连接装置和所述移动装置进行控制。
[0014]
上述涂覆机器回收系统,包括牵引机构、绕线机构和连接机构,其中牵引机构具体包括了连接装置、移动装置、第一通讯装置和第一控制装置。当正在架空导线上作业的涂覆机器出现故障时,可以通过发送第一控制指令让控制该回收系统靠近待回收涂覆机器并对该机器进行牵引连接,并通过绕线机构和连接机构将该机器牵引到架空导线电杆旁进行修理。该涂覆机器回收系统可以免受架空导线区域的地理因素影响,更方便快捷的对故障的涂覆机器进行回收。
[0015]
在其中一个实施例中,所述移动装置包括行走轮、行走电机和电源;
[0016]
所述行走轮用于在所述架空导线上行走,为中间凹陷的尼龙轮;
[0017]
所述行走电机为所述行走轮提供行走动力;
[0018]
所述电源为所述行走电机提供电能。
[0019]
在其中一个实施例中,所述牵引机构包括壳体,所述壳体外侧设置有所述连接装置,所述连接装置为双舌卡簧夹头结构;
[0020]
所述牵引机构还包括绝缘提手,所述绝缘提手为设置于所述壳体的顶部。
[0021]
在其中一个实施例中,所述连接机构包括:
[0022]
绝缘绳,用于连接所述牵引机构和所述绕线机构;
[0023]
稳定装置,用于将绝缘绳托举至所述架空导线周围;
[0024]
导向装置,用于改变所述绝缘绳的牵引方向;
[0025]
固定装置,用于将所述导向装置固定在所述架空导线的电杆上。
[0026]
在其中一个实施例中,所述稳定装置包括多个绝缘挂钩,所述绝缘挂钩为s型钩状结构,所述绝缘挂钩一端设置于所述架空导线上,另一端对穿过所述绝缘挂钩的所述绝缘绳进行托举。
[0027]
在其中一个实施例中,所述固定装置包括能够固定于所述电杆上的电杆抱箍,所述电杆抱箍为双半圆弧结构,能够与所述电杆抱合紧固;所述导向装置为中间凹陷的尼龙轮,设置于所述电杆抱箍上。
[0028]
在其中一个实施例中,所述绕线机构包括:
[0029]
绕线装置,用于通过所述绝缘绳向所述牵引机构提供牵引动力;
[0030]
第二通讯装置,用于接收第二控制指令并将所述第二控制指令传递至第二控制装置;
[0031]
第二控制装置,用于根据所述第二通讯装置传递的所述第二控制指令,对所述绕线装置进行控制。
[0032]
在其中一个实施例中,所述绕线装置包括:
[0033]
绕线盘,用于通过自身转动收放所述绝缘绳;
[0034]
绕线电机,用于对所述绕线盘提供转动动力。
[0035]
在其中一个实施例中,还包括:
[0036]
所述第一通讯装置,具体用于接收移动终端发送的所述第一控制指令。
[0037]
在其中一个实施例中,还包括:
[0038]
所述第二通讯装置,具体用于接收移动终端发送的所述第二控制指令。
[0039]
当正在架空导线上作业的涂覆机器出现故障时,可以通过移动终端发送第一控制指令给牵引机构中的第一通讯装置,第一控制装置在接收到来自于第一通讯装置的第一控制指令后开始执行,在架空导线上移动至待回收涂覆机器旁并对该机器进行连接,并移动终端发送第二控制指令给绕线机构中第二通讯装置,第二控制装置在接收到第二通讯装置的第二控制指令后对绕线装置开始进行控制,并通过连接机构将该机器牵引到架空导线电杆旁进行修理。该涂覆机器回收系统解决了现有人工回收涂覆机器过程中受到架空导线区域的地理因素影响,更方便快捷的对故障的涂覆机器进行回收。
附图说明
[0040]
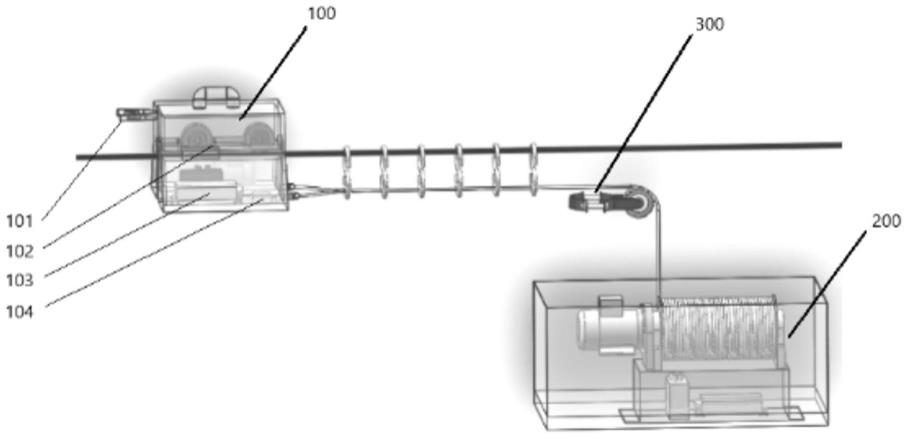
图1为本申请涂覆机器回收系统示意图;
[0041]
图2为本申请涂覆机器回收系统牵引机构示意图;
[0042]
图3为本申请涂覆机器回收系统连接机构示意图;
[0043]
图4为本申请涂覆机器回收系统绕线机构示意图;
[0044]
图5为涂覆机器回收系统进行回收作业时的示意图;
[0045]
附图标记:100-牵引机构、101-连接装置、102-移动装置、103-第一控制装置、104-第一通讯装置、105-电源、106-行走电机、107-行走轮、108-外壳、109-绝缘提手、200-连接机构、201-绝缘绳、202-稳定装置、203-固定装置、204-导向装置、300-绕线机构、301-绕线电机、302-绕线盘、303-第二通讯装置、304-第二控制装置、400-架空导线。
具体实施方式
[0046]
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
[0047]
本申请提供的一种涂覆机器回收系统,如图1所示,该系统包括:牵引机构100、连接机构200和绕线机构300。
[0048]
牵引机构100,如图2所示,设置于架空导线400上,用于连接牵引待回收的涂覆机器;其中,如图2,牵引机构100具体包括了连接装置101、移动装置102、第一通讯装置104和第一控制装置103。
[0049]
连接装置101,具体设置于牵引机构100外侧一端,用于将牵引机构100与待回收的涂覆机器进行连接,在本申请涂覆机器回收系统进行牵引工作时,通过连接装置101能够带动待回收的涂覆机器与牵引机构100同向移动。
[0050]
移动装置102,设置于牵引机构100内部,用于带动牵引机构100在架空导线400上移动;
[0051]
第一通讯装置104,用于接收第一控制指令并将第一控制指令传递至第一控制装置103。其中第一控制指令由移动终端发出,移动终端包括但不限于手机、笔记本电脑和pda(personal digital assistant)等。第一控制指令具体通过无线的方式进行传递,其中第一控制指令的具体内容包括了:
[0052]
(1)前进指令,当待回收涂覆机器在架空导线400的某处等待回收,对本申请涂覆机器回收系统在架空导线电杆处安装完毕,此时牵引机构100处于架空导线电杆附近的初始位置,操作者通过移动终端向第一通讯装置104发送前进指令,第一通讯装置104接收到前进指令并将前进指令传递至第一控制装置103,第一控制装置103控制移动装置102前进,直到本系统的牵引机构100到达待回收的涂覆机器旁。
[0053]
(2)连接指令,当本系统的牵引机构100位于待回收的涂覆机器旁边,操作者通过移动终端向第一通讯装置104发送连接指令,第一通讯装置104接收到连接指令并将连接指令传递至第一控制装置103,第一控制装置103控制连接装置101对待回收涂覆机器进行连接。
[0054]
(3)待机指令,待机指令用于在执行前进的过程中使牵引机构100稳定在架空导线400上进入待机状态,等待绕线机构300对牵引机构100实施牵引。
[0055]
第一控制装置103,用于根据所述第一通讯装置104传递的上述控制指令,对连接装置101和移动装置102进行控制,具体为:
[0056]
(1)第一控制装置103在接收到前进指令时,对移动装置102进行控制,具体包括控制行走电机106进行工作,行走电机106为一定功率的直流电机,为行走轮107提供动力,保证牵引机构100能够在架空导线400上能够前进。
[0057]
(2)第一控制装置103在接收到连接指令时,对连接装置101进行控制,使得连接装置101与待回收涂覆机器能够进行连接,连接装置101为牵引夹头,具体是双舌卡簧夹头结构,能够对待回收涂覆机器的端部进行夹合实现连接。
[0058]
(3)第一控制装置103在接收到待机指令时,对移动装置102进行控制,具体包括控制行走电机106暂停工作,使牵引机构100稳定在架空导线400上。
[0059]
在一个实施例中,移动装置102包括行走轮107、行走电机106和电源105,行走轮107为中间凹陷的尼龙轮,用于在架空导线400上滚动行走,行走电机106为一定功率的直流电机,为行走轮107的转动提供力矩,电源105是高倍率锂电池,为行走电机106的转动提供动力来源。
[0060]
在一个实施例中,牵引机构100外部设置有外壳108,外壳108具体为倒u型结构外壳,用于保护内部零部件,连接装置,101设置于外壳108的外侧,连接装置具体为双舌卡簧夹头结构的牵引夹头,外壳108的顶部设置有绝缘提手109,便于作业人员搬运本装置。
[0061]
在一个实施例中,如图3所示,连接机构200包括:绝缘绳201,用于连接牵引机构100和绕线机构300,是本系统中绕线机构300拉回牵引架构的拉力载体,稳定装置202为多个s型绝缘挂钩,绝缘挂钩一端设置于架空导线400上,另一端对穿过绝缘挂钩的绝缘绳201进行托举,保证绝缘绳201在实际作业过程中相对稳定,固定装置203为双半圆弧结构的电杆抱箍,工作时电杆抱箍固定于架空导线电杆上,导向装置204为中间凹陷的尼龙轮,固定在固定装置203上作为定滑轮为绝缘绳201改变牵引方向。
[0062]
在一个实施例中,如图4所示,绕线机构300包括了绕线装置、第二通讯装置303和第二控制装置304,同时绕线机构300外部设置有箱体,绕线装置具体包括了绕线电机301、绕线盘302和绕线电源,绕线电机301位一定功率的直流电机,为绕线盘302的转动提供力矩,绕线盘302为一定直径的中轴连杆,用于通过转动收放绝缘绳201。
[0063]
第二通讯装置303,用于将第二控制指令通过无线的方式发送后对第二控制装置304进行控制,然后对上述绕线装置进行控制,第二控制指令的具体内容包括了:
[0064]
(1)启动指令,即启动绕线电机301,当牵引机构100中连接装置101已经与待回收的涂覆机器连接完成且牵引机构100处于待机状态,第二控制装置304通过控制绕线电机301进行工作,绕线电机301带动绕线盘302进行转动,将绝缘绳201收回绕线盘302中,绝缘绳201拉取牵引机构100和待回收的涂覆机器到架空导线电杆位置。
[0065]
(2)停止指令,,即停止绕线电机301,当牵引机构100和待回收的涂覆机器回到架空导线电杆附近位置,停止电机。
[0066]
本系统中用于进行控制的第一控制装置103和第二控制装置304为集成化pcb板以及可以完成本系统相关控制功能的电气化元器件。
[0067]
在一个实施例中,可以通过移动终端发送给第一通讯装置104第一控制指令,发送给第二通讯装置104第二控制指令,即在本系统中可以人为远程对本系统进行操作。
[0068]
图5为本涂覆机器回收系统的实际工作示意图,在实际回收工作前将连接机构200设置于待回收涂覆机器最近的架空导线电杆旁,并在该架空导线电杆上设置固定装置203
与导向装置204,并在架空导线400上搭建牵引机构100,搭建完毕之后利用绝缘绳201将牵引机构100和绕线机构300进行连接,并根据实际情况设置固定装置203与导向装置204的位置,最后通过本系统对待回收的涂覆机器进行牵引回收,利用本涂覆机器回收系统去完成涂覆机器回收方便作业人员远程操作,避免了直接接触带电物体的危险性,同时有利于涂覆机器绝缘作业的推广,推进了电力系统智能化建设。
[0069]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0070]
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1