一种滑触供电受电弓的制作方法
1.本发明涉及机器人,具体涉及轨道式机器人的充电设备。
背景技术:
2.公路隧道等场景中的智能轨道式机器人,以充电电池作为动力驱动,当机器人电池的电量即将耗尽,控制平台检测到电池电量达到设定值,向系统发出指令,请求充电,在系统允许后自动到充电桩位置充电,此时,机器人不能工作,处于充电状态,大大降低生产效率。
技术实现要素:
3.本发明所解决的技术问题:解决机器人充电问题,实现机器人7*24小时巡检。
4.为解决上述技术问题,本发明提供如下技术方案:一种滑触供电受电弓,包括固定架、与固定架活动配合的活动模块,固定架上设有能够驱动活动模块相对固定架往复运动的偏心轮机构,活动模块上设有导体,固定架上设有与导体电连接的导电件。
5.固定架安装在机器人上,导电件与机器人运行轨道上的导电钢线接触。机器人需要充电时,偏心轮机构动作,驱动活动模块向远离固定架的方向位移,如此,活动模块上的导体与机器人电池电连接,供电系统通过导电钢线和受电弓向机器人电池充电。在电池充电过程中,机器人可以正常巡检,实现一周7*24小时不间断巡检,提高生产效率。
附图说明
6.下面结合附图对本发明做进一步的说明:
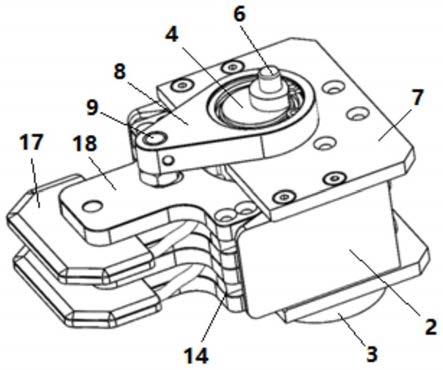
7.图1为一种滑触供电受电弓的示意图;
8.图2为图1中侧板2隐藏后的示意图;
9.图3为图1中偏心轮4转动,活动模块缩进固定架的示意图。
10.图中符号说明:
11.2、侧板;3、马达;4、偏心轮;6、马达轴;7、顶板;8、连杆;9、销件;14、电刷导杆;
12.17、导体;18、绝缘连接板;
13.20、导电件;21、弹簧。
具体实施方式
14.结合图1、图2,一种滑触供电受电弓,包括固定架、与固定架活动配合的活动模块,固定架上设有能够驱动活动模块相对固定架往复运动的偏心轮机构,活动模块上设有导体17,固定架上设有与导体电连接的导电件20。
15.实际操作中,机器人沿运行轨道滑行。所述固定架安装在机器人上,导电件20与机器人运行轨道上的导电钢线接触,实现导电件与导电钢线的电连接。初始,导体17与机器人的电池电极处于断开状态。当机器人电池的电量即将耗尽,控制平台检测到电池电量达到
设定值,向系统发出指令,请求充电,在系统允许后,控制平台驱动偏心轮机构正向旋转,偏心轮机构驱动活动模块向远离固定架的方向位移,如此,活动模块上的导体17与机器人电池电连接,供电系统通过导电钢线和受电弓向机器人电池充电,如图1所示。
16.在电池充电过程中,机器人可以正常巡检,实现一周7*24小时不间断巡检。充电结束,控制平台驱动偏心轮机构反向旋转,如图3,偏心轮机构驱动活动模块向接近固定架的方向位移,如此,活动模块上的导体17与机器人电池断开连接。
17.如图1,作为一种结构上的设计,固定架呈框形状,活动模块配合在固定架中。机器人内部空间有限,框形状的固定架内填充活动模块,充分利用空间,在偏心轮机构的驱动下,活动模块在固定架内腔的导向下实现线性位移,无需另设导向机构。
18.偏心轮机构包括设置在固定架底部的马达3、设置在固定架顶部且与马达连接的偏心轮4、与偏心轮配合的连杆8,连杆的一端与活动模块连接。其中,马达的上部可以设置在固定架内腔中,马达的下部可以因固定架内腔较小而向下外露出固定架底部。如此,可以进一步缩小受电弓的占用空间。为了避让马达3,活动模块位于固定架内腔的一端可以开设让位豁口,而活动模块位于固定架内腔的两边侧与固定架的一对侧板2接触,如此,在一对侧板2的导向下,活动模块能够相对固定架线性往复位移。所述偏心轮4可以直接安装在向上突出固定架顶板7的马达轴6上。
19.导体17包括正极导体和负极导体,活动模块包括夹持正极导体和负极导体的若干绝缘连接板18,若干绝缘连接板通过连接件固定连接。最顶部的绝缘连接板通过销件9与连杆8的一端连接。
20.结合图1、图2,每相邻两绝缘连接板18之间夹持有电刷导杆14,电刷导杆与导体17通过导线连接,电刷导杆通过弹簧21与导电件20连接。在偏心轮机构的驱动下,活动模块相对固定架线性位移,电刷导杆14相对导电件20线性位移,弹簧21作伸缩运动,使电刷导杆与导电件保持电连接。作为一种选择,导电件20为电刷,导体17为铜片。
21.以上内容仅为本发明的较佳实施方式,对于本领域的普通技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本发明的限制。
技术特征:
1.一种滑触供电受电弓,包括固定架、与固定架活动配合的活动模块,其特征在于:固定架上设有能够驱动活动模块相对固定架往复运动的偏心轮机构,活动模块上设有导体(17),固定架上设有与导体电连接的导电件(20)。2.如权利要求1所述的一种滑触供电受电弓,其特征在于:固定架呈框形状,活动模块配合在固定架中。3.如权利要求2所述的一种滑触供电受电弓,其特征在于:偏心轮机构包括设置在固定架底部的马达(3)、设置在固定架顶部且与马达连接的偏心轮(4)、与偏心轮配合的连杆(8),连杆的一端与活动模块连接。4.如权利要求2所述的一种滑触供电受电弓,其特征在于:导体(17)包括正极导体和负极导体,活动模块包括夹持正极导体和负极导体的若干绝缘连接板(18),若干绝缘连接板通过连接件固定连接。5.如权利要求4所述的一种滑触供电受电弓,其特征在于:每相邻两绝缘连接板(18)之间夹持有电刷导杆(14),电刷导杆与导体(17)通过导线连接,电刷导杆通过弹簧(21)与导电件(20)连接。
技术总结
本发明公开了一种滑触供电受电弓,包括固定架、与固定架活动配合的活动模块,固定架上设有能够驱动活动模块相对固定架往复运动的偏心轮机构,活动模块上设有导体,固定架上设有与导体电连接的导电件。固定架安装在机器人上,导电件与机器人运行轨道上的导电钢线接触。机器人需要充电时,偏心轮机构驱动活动模块,活动模块上的导体与机器人电池电连接,供电系统通过导电钢线和受电弓向机器人电池充电。在电池充电过程中,机器人可以正常巡检,实现7*24小时不间断巡检,提高生产效率。提高生产效率。提高生产效率。
技术研发人员:胡昌
受保护的技术使用者:深圳大仓机器人研发有限公司
技术研发日:2021.09.02
技术公布日:2021/11/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1