一种用于输电线路的智能作业机器人的制作方法
1.本实用新型涉及输电线路技术领域,具体为一种用于输电线路的智能作业机器人。
背景技术:
2.由于输电线路分布点多、面广,绝大部分远离城镇,所处地形复杂,自然环境恶劣,且电力线及杆塔附件长期暴露在野外,会受到持续的机械张力、电气闪络、材料老化的影响而产生断股、磨损、腐蚀等损伤。为了及时对这些有损伤电路进行更换,目前人们会采用智能作业机器人。
3.现有技术下的输电线路的智能作业机器人会在线路上自动滑动并检测,而现有的智能作业机器人虽然采用滑轮在线路上运动,但其本身不具备防脱结构,并且滑轮在线路上不具备抓紧功能,因此智能作业机器人在作业的过程中,容易出现掉落风险,导致智能作业机器人出现损坏,并影响到线路的正常检测。
技术实现要素:
4.本实用新型的目的在于提供一种用于输电线路的智能作业机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种用于输电线路的智能作业机器人,所述锁定结构为机器人组件的上端一侧,其中机器人组件包括有机器人本体、支撑杆、固定挡杆、嵌入槽、内置槽与调节圆柱,所述支撑杆由螺钉固定在机器人本体的上端中侧,其中固定挡杆由螺钉固定在支撑杆的上端一侧,所述嵌入槽贯穿固定挡杆的一端布置,其中内置槽开设在支撑杆上端一侧,所述调节圆柱放置在内置槽的内部,所述调节圆柱上端中侧设置焊接连接的活动挡杆,其中活动挡杆一端中侧设置一体成型的嵌入块,所述嵌入块位于嵌入槽的内部。
6.优选的,所述固定挡杆布置的形状为半圆形管,其中调节圆柱与支撑杆之间进行转轴连接。
7.优选的,所述调节圆柱一端设置焊接连接的贴合板,其中贴合板的形状为矩形块,所述贴合板一端中侧设置一体成型的导入块。
8.优选的,所述锁定结构包括有增距柱、圆形槽、导向槽、暗槽与顶出弹簧,其中圆形槽开设在增距柱的上端,所述导向槽开设在增距柱的上端一侧,其中暗槽开设在增距柱的一端一侧,所述顶出弹簧位于圆形槽的内部。
9.优选的,所述增距柱与支撑杆之间为一体成型的结构,其中导向槽贯穿圆形槽开设,所述暗槽贯穿导向槽开设,其中顶出弹簧上端放置有顶块,所述顶块一端设置螺钉连接的滑动块,滑动块贯穿导向槽布置。
10.优选的,所述顶块上端放置有限制块,限制块与增距柱之间进行转轴连接,所述顶块上端设置螺钉连接的锁定杆,锁定杆贯穿限制块布置。
11.与现有技术相比,本实用新型的有益效果是:
12.1、通过对本实用的设置,可使得智能作业机器人在作业时,不会出现掉落的现象,有效的保证智能作业机器人进行正常的作业,即便滑动轮在线路上脱落,依靠防脱结构的支撑,智能作业机器人不会摔在地面上;
13.2、通过对固定挡杆与活动挡杆的布置,同时固定挡杆与活动挡杆均采用环形管,在防脱的同时,不会对线路造成损坏。
附图说明
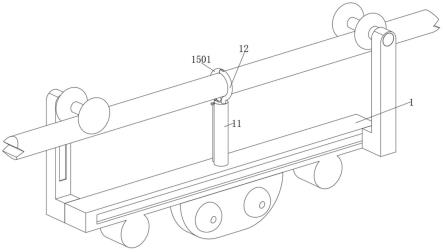
14.图1为本实用新型立体结构示意图;
15.图2为本实用新型支撑杆立体示意图;
16.图3为本实用新型支撑杆半剖立体示意图。
17.图中:机器人本体1、支撑杆11、固定挡杆12、嵌入槽13、内置槽14、调节圆柱15、活动挡杆1501、嵌入块1502、贴合板1503、导入块1504、增距柱2、导向槽21、暗槽22、顶出弹簧23、顶块2301、滑动块2302、限制块2303、锁定杆2304。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.请参阅图1至图3,本实用新型提供一种技术方案:包括具有防脱结构的机器人组件与具有定位功能的锁定结构,锁定结构为机器人组件的上端一侧,其中机器人组件包括有机器人本体1、支撑杆11、固定挡杆12、嵌入槽13、内置槽14与调节圆柱15,支撑杆11由螺钉固定在机器人本体1的上端中侧,其中固定挡杆12由螺钉固定在支撑杆11的上端一侧,嵌入槽13贯穿固定挡杆12的一端布置,利用嵌入槽13与嵌入块1502,可以加强固定挡杆12与活动挡杆1501 抵触,使得固定挡杆12与活动挡杆1501更好的套在线路上,其中内置槽14开设在支撑杆11上端一侧,固定挡杆12布置的形状为半圆形管,其中调节圆柱15与支撑杆11之间进行转轴连接,调节圆柱 15放置在内置槽14的内部,调节圆柱15上端中侧设置焊接连接的活动挡杆1501,其中活动挡杆1501一端中侧设置一体成型的嵌入块 1502,嵌入块1502位于嵌入槽13的内部,调节圆柱15一端设置焊接连接的贴合板1503,其中贴合板1503的形状为矩形块,贴合板1503 一端中侧设置一体成型的导入块1504,导入块1504为任意形状,例如:半圆形、方形等,锁定结构包括有增距柱2、圆形槽、导向槽21、暗槽22与顶出弹簧23,其中圆形槽开设在增距柱2的上端,导向槽 21开设在增距柱2的上端一侧,其中暗槽22开设在增距柱2的一端一侧,顶出弹簧23位于圆形槽的内部,增距柱2与支撑杆11之间为一体成型的结构,其中导向槽21贯穿圆形槽开设,暗槽22贯穿导向槽21开设,其中顶出弹簧23上端放置有顶块2301,顶块2301一端设置螺钉连接的滑动块2302,滑动块2302贯穿导向槽21布置,顶块2301上端放置有限制块2303,限制块2303与增距柱2之间进行转轴连接,顶块2301上端设置螺钉连接的锁定杆2304,锁定杆2304 贯穿限制块2303布置,锁定杆2304一端开设对应导入块1504的卡槽,这样利用锁定杆2304可以加强对调节圆柱15的位置限制。
20.工作原理:在转动活动挡杆1501之前,使得滑动块2302的一端位于暗槽当中,此时顶出弹簧23处于蓄力形变状态,锁定杆2304收缩,进一步的利用调节圆柱15对活动挡杆1501进行转动,使得嵌入块1502位于嵌入槽13的内部,随后转出滑动块2302,在顶出弹簧 23对顶块2301的顶动下,滑动块2302在导向槽21滑动,导入杆1504 顶出,并抵触贴合板1503,此时固定挡杆12与活动挡杆1501贴合固定,并套在线路上。
21.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种用于输电线路的智能作业机器人,包括具有防脱结构的机器人组件与具有定位功能的锁定结构,其特征在于:所述锁定结构为机器人组件的上端一侧,其中机器人组件包括有机器人本体(1)、支撑杆(11)、固定挡杆(12)、嵌入槽(13)、内置槽(14)与调节圆柱(15),所述支撑杆(11)由螺钉固定在机器人本体(1)的上端中侧,其中固定挡杆(12)由螺钉固定在支撑杆(11)的上端一侧,所述嵌入槽(13)贯穿固定挡杆(12)的一端布置,其中内置槽(14)开设在支撑杆(11)上端一侧,所述调节圆柱(15)放置在内置槽(14)的内部,所述调节圆柱(15)上端中侧设置焊接连接的活动挡杆(1501),其中活动挡杆(1501)一端中侧设置一体成型的嵌入块(1502),所述嵌入块(1502)位于嵌入槽(13)的内部。2.根据权利要求1所述的一种用于输电线路的智能作业机器人,其特征在于:所述固定挡杆(12)布置的形状为半圆形管,其中调节圆柱(15)与支撑杆(11)之间进行转轴连接。3.根据权利要求1所述的一种用于输电线路的智能作业机器人,其特征在于:所述调节圆柱(15)一端设置焊接连接的贴合板(1503),其中贴合板(1503)的形状为矩形块,所述贴合板(1503)一端中侧设置一体成型的导入块(1504)。4.根据权利要求1所述的一种用于输电线路的智能作业机器人,其特征在于:所述锁定结构包括有增距柱(2)、圆形槽、导向槽(21)、暗槽(22)与顶出弹簧(23),其中圆形槽开设在增距柱(2)的上端,所述导向槽(21)开设在增距柱(2)的上端一侧,其中暗槽(22) 开设在增距柱(2)的一端一侧,所述顶出弹簧(23)位于圆形槽的内部。5.根据权利要求4所述的一种用于输电线路的智能作业机器人,其特征在于:所述增距柱(2)与支撑杆(11)之间为一体成型的结构,其中导向槽(21)贯穿圆形槽开设,所述暗槽(22)贯穿导向槽(21)开设,其中顶出弹簧(23)上端放置有顶块(2301),所述顶块(2301)一端设置螺钉连接的滑动块(2302),滑动块(2302)贯穿导向槽(21)布置。6.根据权利要求5所述的一种用于输电线路的智能作业机器人,其特征在于:所述顶块(2301)上端放置有限制块(2303),限制块(2303)与增距柱(2)之间进行转轴连接,所述顶块(2301)上端设置螺钉连接的锁定杆(2304),锁定杆(2304)贯穿限制块(2303)布置。
技术总结
本实用新型涉及输电线路技术领域,具体为一种用于输电线路的智能作业机器人。所述锁定结构为机器人组件的上端一侧,其中机器人组件包括有机器人本体、支撑杆、固定挡杆、嵌入槽、内置槽与调节圆柱,所述支撑杆由螺钉固定在机器人本体的上端中侧,其中固定挡杆由螺钉固定在支撑杆的上端一侧,所述嵌入槽贯穿固定挡杆的一端布置,其中内置槽开设在支撑杆上端一侧,所述调节圆柱放置在内置槽的内部。可使得智能作业机器人在作业时,不会出现掉落的现象,有效的保证智能作业机器人进行正常的作业,即便滑动轮在线路上脱落,依靠防脱结构的支撑,智能作业机器人不会摔在地面上。智能作业机器人不会摔在地面上。智能作业机器人不会摔在地面上。
技术研发人员:李正佳 刘国特 戴锐
受保护的技术使用者:苏州华天国科电力科技有限公司
技术研发日:2021.10.20
技术公布日:2022/7/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1