一种换行光伏板清扫机器人用搭接装置的制作方法
字型杆,所述边缘杆为角钢。
8.作为进一步的优化,本实用新型所述搭接杆与支撑板滑动连接,与中间杆相对应的支撑板的中部设置有滑槽,所述中间杆的中间突起卡到支撑板的滑槽内,与边缘杆相对应的支撑板上设置有限位螺栓,所述边缘杆上设置有长条孔,所述限位螺栓穿过长条孔螺接在支撑板上。
9.作为进一步的优化,本实用新型所述搭接杆的远离光伏板的一端设置有平板,所述支撑杆上的凹槽的长度大于平板的长度。
10.本实用新型具有以下优点:
11.1、本实用新型的搭接装置包括搭接杆,搭接杆的一端铰接在光伏板上,搭接杆的另一端能够通过安装组件能够进行高度调节,对换行装置的设计要求降低,也方便换行装置后期的扩展升级;
12.2、本实用新型的搭接杆通过弹簧设置在安装组件上,并且换行装置上用于支撑光伏板清扫机器人的支撑杆上设置只有凹槽,搭接杆的端部设置有与凹槽相对应平板,光伏板清扫机器人位于支撑杆上时,搭接杆的端部高于支撑板,不影响换行装置的移动,当光伏板清扫机器人由支撑杆行走至搭接杆上时,将搭接杆下压,搭接杆上的平板落入凹槽内,起到一定的限位作用,确保了光伏板清扫机器人在搭接杆上的行走稳定性。
附图说明
13.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例中描述中所需要使用的附图作简要介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
14.下面结合附图对本实用新型进一步说明:
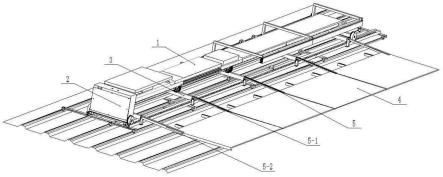
15.图1为本实用新型的设置工况设置意图;
16.图2为安装组件的结构示意图;
17.图3为其中一种支撑板的俯视示意图;
18.图4为另一支撑板的俯视示意图。
19.其中:1、光伏板清扫机器人,2、换行装置,3、支撑杆,4、光伏板,5、搭接杆,6、外套管,7、升降座,8、螺杆,9、弹簧,10、支撑板,11、导向柱,12、主动锥齿轮,13、旋转手柄,14、被动锥齿轮,15、限位螺栓,3-1、凹槽,5-1、中间杆,5-2、边缘杆,5-2-1、长条孔,10-1、滑槽。
具体实施方式
20.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好地理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定,在不冲突的情况下,本实用新型实施例以及实施例中的技术特征可以相互结合。
21.需要理解的是,在本实用新型实施例的描述中,“第一”、“第二”等词汇,仅用于区分描述的目的,而不能理解为指示或暗示相对重要性,也不能理解为指示或暗示顺序。在本实用新型实施例中的“多个”,是指两个或两个以上。
22.本实用新型实施例中的属于“和/或”,仅仅是一种描述关联对象的关联关系,表示
可以存在三种关系,例如,a和/或b,可以表示:单独存在a,单独存在b,同时存在a和b这三种情况。另外,本文中字符“/”一般表示前后关联对象是一种“或”关系。
23.本实施例提供一种换行光伏板清扫机器人用搭接装置,如图1所示,设置在换行装置2与光伏板4之间,光伏板4铺设在瓦楞板上,所述换行装置2设置在光伏板4的一端,换行装置2的下方设置有纵向方向的支撑轨道,换行装置为沿所述支撑轨道移动的小车,光伏板清扫机器人1从光伏板4移动至换行装置2上时,需要跨越本实施例的搭接装置,然后再由换行装置2带动光伏板清扫机器人1移动下下一行的光伏板4处,移动到位后,光伏板清扫机器人1由换行装置2跨入本实施例的搭接装置2后移动至光伏板4上,进行清扫作业。换行装置2上设置有若干支撑杆3,当光伏板清扫机器人1移动至换行装置2上时,光伏板清扫机器人1的行走轮位于支撑杆3上,当然的,这些支撑杆3也直接对接本实施例的搭接装置。
24.本实施例的搭接装置包括多组搭接杆5,所述搭接杆5的设置数量与光伏板清扫机器人1的行走轮相对应,所述搭接杆5的一端铰接在光伏板4上,所述搭接杆5的另一端通过安装组件设置瓦楞板上,且靠近换行装置的支撑杆3,所述安装组件包括外套管6、滑动设置在外套管6内的升降座7和用于驱动升降座7移动的调节组件,所述调节组件包括螺杆8、主动锥齿轮12和被动锥齿轮14,所述螺杆8沿竖直方向转动设置在外套管6内,所述主动锥齿轮12转动设置在外套管6的侧壁上,且主动锥齿轮12穿过外套管6的侧壁连接有旋转手柄13,所述被动锥齿轮14与螺杆8固定连接,被动锥齿轮13与主动锥齿轮12之间相啮合连接,所述升降座7与螺杆8之间相螺接,所述搭接杆5的另一端连接在升降座7上。
25.本实施例所述升降座7的上设置有弹性支撑组件,所述弹性支撑组件包括弹簧9和支撑板10,所述支撑板10通过导向柱11与升降座7滑动连接,所述弹簧9的两端分别固定连接在升降座7与支撑板10上,所述支撑杆3靠近搭接杆的一端设置有凹槽3-1,所述搭接杆5远离光伏板4的一端位于凹槽3-1的上端,且搭接杆5的该端设置有平板,所述支撑杆3上的凹槽的长度大于平板的长度,为平板留有足够的移动余量,当光伏板清扫机器人1由支撑杆3行走至搭接杆5上时,所述搭接杆5平板被压在支撑杆3的凹槽内。
26.考虑到搭接杆5在铰接转动时,端部会存在位移的情况,因此需要将搭接杆5与支撑板10之间设置成滑动连接,作为不同的安装使用位置,所述搭接杆包括中间杆5-1和边缘杆5-2,所述中间杆5-1设置在同组内的相邻两片光伏板4之间,所述中间杆5-1为“几”字型杆,所述边缘杆5-2用于连接在每组光伏板4的边缘,因此边缘杆5-2为角钢,因为搭接杆5的类型不同,因此其滑动设置的方式也不同,与中间杆5-1相对应的支撑板10的中部设置有滑槽10-1,因为中间杆5-1为“几”字型,因此中间杆5-1的中间突起卡到支撑板10的滑槽10-1内,与边缘杆5-2相对应的支撑板10上设置有限位螺栓15,所述边缘杆5-2上设置有长条孔5-2-1,所述限位螺栓10穿过长条孔5-2-1螺接在支撑板10上。
27.以上所述实施例仅是为充分说明本实用新型而所举的较佳的实施例,本实用新型的保护范围不限于此。本技术领域的技术人员在本实用新型基础上所作的等同替代或变换,均在本实用新型的保护范围之内。本实用新型的保护范围以权利要求书为准。
技术特征:
1.一种换行光伏板清扫机器人用搭接装置,用于安装光伏板与换行装置之间,其特征在于:包括多组搭接杆,所述搭接杆的设置数量与光伏板清扫机器人的行走轮相对应,所述搭接杆的一端铰接在光伏板上,所述搭接杆的另一端通过安装组件设置在靠近换行装置处,所述安装组件包括外套管、滑动设置在外套管内的升降座和用于驱动升降座移动的调节组件,所述调节组件包括螺杆、主动锥齿轮和被动锥齿轮,所述螺杆沿竖直方向转动设置在外套管内,所述主动锥齿轮转动设置在外套管的侧壁上,且主动锥齿轮穿过外套管的侧壁连接有旋转手柄,所述被动锥齿轮与螺杆固定连接,被动锥齿轮与主动锥齿轮相啮合连接,所述升降座与螺杆之间相螺接,所述搭接杆的另一端连接在升降座上。2.根据权利要求1所述的换行光伏板清扫机器人用搭接装置,其特征在于:所述升降座的上设置有弹性支撑组件,所述弹性支撑组件包括弹簧和支撑板,所述支撑板通过导向柱与升降座滑动连接,所述弹簧的两端分别固定连接在升降座与支撑板上,所述换行装置通过支撑杆支撑光伏板清扫机器人,所述支撑杆靠近搭接杆的一端设置有凹槽,所述搭接杆远离光伏板的一端位于凹槽的上端,当光伏板清扫机器人由支撑杆行走至搭接杆上时,所述搭接杆原理光伏板的一端被压在支撑杆的凹槽内。3.根据权利要求2所述的换行光伏板清扫机器人用搭接装置,其特征在于:所述搭接杆包括中间杆和边缘杆,所述中间杆设置在相邻两片光伏板之间,所述边缘杆用于连接在每组光伏板的边缘,所述中间杆为“几”字型杆,所述边缘杆为角钢。4.根据权利要求3所述的换行光伏板清扫机器人用搭接装置,其特征在于:所述搭接杆与支撑板滑动连接,与中间杆相对应的支撑板的中部设置有滑槽,所述中间杆的中间突起卡到支撑板的滑槽内,与边缘杆相对应的支撑板上设置有限位螺栓,所述边缘杆上设置有长条孔,所述限位螺栓穿过长条孔螺接在支撑板上。5.根据权利要求3所述的换行光伏板清扫机器人用搭接装置,其特征在于:所述搭接杆的远离光伏板的一端设置有平板,所述支撑杆上的凹槽的长度大于平板的长度。
技术总结
本实用新型公开了一种换行光伏板清扫机器人用搭接装置,本实用新型包括多组搭接杆,所述搭接杆的设置数量与光伏板清扫机器人的行走轮相对应,所述搭接杆的一端铰接在光伏板上,所述搭接杆的另一端通过安装组件设置在靠近换行装置处,所述安装组件包括外套管、滑动设置在外套管内的升降座和用于驱动升降座移动的调节组件,所述调节组件包括螺杆、主动锥齿轮和被动锥齿轮,所述螺杆沿竖直方向转动设置在外套管内,所述主动锥齿轮转动设置在外套管的侧壁上。本实用新型的搭接装置包括搭接杆,搭接杆的一端铰接在光伏板上,搭接杆的另一端能够通过安装组件能够进行高度调节,对换行装置的设计要求降低,也方便换行装置后期的扩展升级。扩展升级。扩展升级。
技术研发人员:曹国民 苏冰 韩军伟 王珂
受保护的技术使用者:郑州德瑞智能科技有限公司
技术研发日:2021.12.20
技术公布日:2022/9/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1