一种具备永磁导轨支撑形式的直线电磁执行器的制作方法
1.本发明涉及一种直线电磁执行器的结构,尤其涉及具有非接触特征的磁导轨支撑结构的直线电磁执行器构型设计。
背景技术:
2.特征尺寸在mm量级的小型化的电磁执行器广泛应用于生物医疗,消费电子等领域,如胃镜胶囊中的摄像头旋转机构,智能手机中的镜头驱动器等。由于电磁执行器体积越来越小,转子与定子之间的支撑部件,如轴承、导轨等的加工和装配精度也面临着越来越高的要求,降低转子与导轨之间的摩擦与磨损是需要解决的关键技术点之一。
3.文献1(m.v.shutov,et.al,a microfabricated electromagnetic linear synchronous motor,sens.actuators a phys.121(2005)566
–
575, http://dx.doi.org/10.1016/j.sna.2005.03.022.)使用了单晶硅的湿法腐蚀制备了燕尾槽型导轨,设计复杂,材料也仅限于《100》取向的单晶硅。文献2(c.zhi,et.al, fabrication and characterization of micro electromagnetic linear actuators,j. micromech.microeng.30(2020)125011)使用了类似于滑动导轨的设计,进行了实验验证,保证了加工的通用性,但不可避免的存在着转子与导轨碰撞及“卡死”现象。文献3(c.zhi,et.al,a self-attachable and self-alignable electromagnetic linear actuator,j.micromech.microeng.31(2021)015001,)提出了一种非接触式的磁导轨,利用阵列磁铁和阵列铁芯,一方面实现了自吸附自定位,另一方面也有效避免了碰撞和导轨的摩擦,但由于阵列化的永磁体和铁芯的排布,使得转子受到的推力出现波动。
技术实现要素:
4.基于上述问题,本发明提出一种具备永磁导轨支撑形式的直线电磁执行器,其中转子为永磁体,通过在转子运动方向上设置永磁导轨,利用永磁体与永磁体的相互作用力形成非接触式的约束,使得转子在运动方向上可以不受磁力约束,无推力波动现象,在非运动方向上的运动被约束。
5.所采用的技术方案是:一种具备永磁导轨支撑形式的直线电磁执行器,包括定子、转子和永磁导轨;转子内含有线条状永磁体,设于定子的上方;永磁导轨固定在定子上方;永磁导轨有两根,分别位于转子的两侧且与转子相平行。
6.永磁导轨和转子的永磁体具有相同的磁化方向;以空间直角坐标系,x方向为转子运动方向;在z方向,永磁导轨的高度大于转子的高度;在y方向,转子的中心位于两个永磁导轨的中心点;在x方向,永磁导轨的长度大于转子的长度,且小于定子的长度;
7.根据对称原理,转子在y方向受到永磁导轨的作用力平衡,在z方向受到的作用力向下,转子贴于定子表面,此时转子的位置为平衡位置。
8.进一步的,磁化方向相同,为永磁导轨和转子的永磁体的磁化方向同时向上或向下。
9.本发明通过在转子运动方向上设置永磁导轨,利用永磁体与永磁体的相互作用力形成非接触式的约束,使得转子在运动方向上可以不受磁力约束,无推力波动现象,在非运动方向上的运动被约束。解决了执行器中转子与导轨间由于摩擦导致的性能底下等问题。
10.本发明中永磁导轨结构简单,一方面简化了加工与装配难度,另一方面避免了转子与导轨的摩擦,提升了执行器性能,减小了推力波动。
附图说明
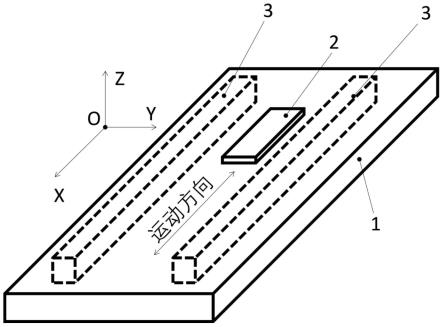
11.图1是本发明的结构示意图;
12.图2是本发明的截面图(yoc截面);
13.图3是本发明中转子发生y方向位置变化时受到的永磁导轨作用力;
14.图4是本发明中转子发生z方向位置变化时受到的永磁导轨作用力;
15.图5是本发明中转子发生x,y,z轴转动时受到永磁导轨的力矩。
具体实施方式
16.下面结合附图并通过实施例对本发明作进一步的详细说明,以下实施例是对本发明的解释而本发明并不局限于以下实施例。其中的定子,包括定子结构件及定子上的线圈绕组部分;转子,包括转子结构件和转子永磁体。
17.参阅图1至图5,本发明一种具备永磁导轨支撑形式的直线电磁执行器,包括定子1、转子2和永磁导轨3,执行器的转子运动方向为图1中x方向,为方便说明,将图1中的坐标原点移动到转子中心处,选取yoz平面,截面图如图 2所示。
18.图2中,定子1中包含定子线圈和定子结构体,转子2中包含线条状永磁体,采用洛伦兹力驱动,基于相同构造的电磁执行器构型和驱动原理已在文献2 和文献3中有详细阐述,此处不再详细阐述,因此定子中线圈的作用在本专利中忽略,同时忽略重力作用,仅阐述永磁导轨的作用效果。
19.图2中,永磁导轨3固定在定子1上,永磁导轨3位于转子2的两侧,且与转子相平行;永磁导轨3和转子2的永磁体具有相同的向上的磁化方向,永磁导轨3在z方向尺寸高于转子2的尺寸。在y方向,转子2的中心位于两个永磁导轨3中心,根据对称原理,转子2此时在y方向受到永磁导轨3的作用力平衡,而在z方向受到的作用力向下,因而会贴于定子1表面,定义此时转子的位置为平衡位置。
20.当转子受到外界扰动,如过载加速度,振动、冲击等扰动作用时,转子2 的位置会发生变动,根据麦克斯韦方程式可以计算出转子所受到的作用力。如图3所示,转子的位置在y方向发生变化δy时,转子受到的永磁导轨的作用力,图3中可以看出δy为正时,y方向作用力为负;反之亦然,即永磁导轨的作用使转子回复到平衡位置。
21.同理可以计算出转子发生z方向位置变化δz时受到的作用力,如图4所示,设h2为永磁导轨的高度,h1为转子的高度,当0≤δz<(h2-h1)/2时,受到的z方向作用力为负,代表作用力向下,转子会回到定子表面,可被约束在定子上;当转子位置在δz=(h2-h1)/2时,在z方向受到的永磁导轨作用力为零,即为平衡位置,由此时的斜率可知,此平衡位置为不稳定平衡位置;一旦δz>(h2-h1)/2,转子受到的z方向的作用力为正,即脱离磁轴承约束。由此可知,当转子和永磁导轨基于定子位于相同位置时,为实现对转子的稳定约束,有
必要设计h2>h1。
22.同理可以计算出转子发生x,y,z轴转动时(即转子位置为θ
x
,θy,θz,)受到的永磁导轨的回复力矩,如图5所示,由图可以看出,在平衡位置附近产生一定程度的扰动时,永磁导轨对转子的约束力矩可以使得转子回复到平衡位置。
23.综上所述,通过此种形式的永磁导轨对转子在y轴,z轴的平动和绕xyz 轴的转动都有约束,在x轴上无约束力,即不影响转子在运动方向上的特性,且不产生推力波动,实现了导轨功能且具有非接触的特征。
技术特征:
1.一种具备永磁导轨支撑形式的直线电磁执行器,其特征在于包括定子、转子和永磁导轨;所述的转子设于定子的上方,转子内含有线条状永磁体;所述的永磁导轨固定在定子上方;永磁导轨有两根,分别位于转子的两侧且与转子相平行;所述的永磁导轨和转子的永磁体具有相同的磁化方向;以空间直角坐标系,x方向为转子运动方向;在z方向,永磁导轨的高度大于转子的高度;在y方向,转子的中心点位于两个永磁导轨之间距离的中点;在x方向,永磁导轨的长度大于转子的长度,且小于定子的长度;根据对称原理,所述的转子在y方向受到永磁导轨的作用力平衡,在z方向受到的作用力向下,转子贴于所述的定子表面,此时转子的位置为平衡位置。2.根据权利要求1所述的一种具备永磁导轨支撑形式的直线电磁执行器,其特征在于所述的磁化方向相同,为永磁导轨和转子的永磁体的磁化方向同时向上或向下。
技术总结
本发明公开一种具备永磁导轨支撑形式的直线电磁执行器,包括定子、转子和永磁导轨;转子内含有线条状永磁体,设于定子的上方;永磁导轨固定在定子上方;永磁导轨有两根,分别位于转子的两侧且与转子相平行,永磁导轨和转子的永磁体具有相同的磁化方向。本发明中的转子为永磁体,通过在转子运动方向上设置永磁导轨,利用永磁体与永磁体的相互作用力形成非接触式的约束,使得转子在运动方向上可以不受磁力约束,无推力波动现象,在非运动方向上的运动被约束。动被约束。动被约束。
技术研发人员:支钞 潘安远 王月
受保护的技术使用者:浙江德欧电气技术股份有限公司
技术研发日:2022.04.29
技术公布日:2022/8/12
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1