一种用于飞机副翼的高性能机电作动器的制作方法
1.本发明涉及电控技术领域,具体是涉及一种用于飞机副翼的高性能机电作动器。
背景技术:
2.由于减少化石燃
料
和环境污染的双重压
力
,航空业提出了
更
多电动飞机的概念,该概念的目标是减轻飞机重量,从而提高能源效率,减少排放和维护成本。用电气控制来取代液压、机械和气动系统。机电作动器(ema)作为未来飞控作动系统的核心执行单元,其动态响应性能、稳定性和可靠性等直接影响整个飞控作动系统的性能。在飞
行
场景控制中,机电致作动器控制系统中,频率响应和执
行
器的补偿反馈非常重要,因为它们决定了响应时间和控制的精确性、安全性,但由于环境干扰因素较多,机电作动器控制器的控制性能降低,难以适用于高空飞行。
技术实现要素:
3.为了克服现有技术存在的缺点,本发明提出了一种用于飞机副翼的高性能机电作动器,在减轻重量、提升效率及提高可靠性的同时,降低外力干扰对机电作动器控制的影响。
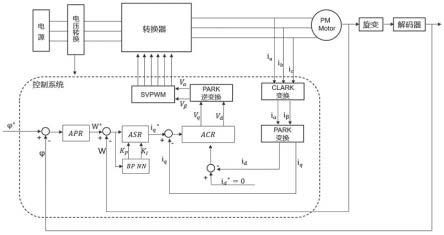
4.本发明提供一种用于飞机副翼的高性能机电作动器,涉及电控技术领域,包括电压变换器、功率转换器、电流传感器、无刷直流电机、旋转变压器、解码器、bp-pi控制系统;控制系统经过自动计算及参数调制后将信号发送至功率转换器,功率转换器按控制功率驱动永磁同步电机,进而控制输出转矩,从而实现线性控制;直线执
行
器通过减速后驱动丝杠进行直线运动;电流反馈通过电流传感器采集信号传输至控制系统,解码器将转子的转速和角度按要求反馈至控制系统。
5.所述的控制器为pi控制器,其控制回路采用三个嵌套环构成,由内而外依次为电流环、速度环、位置环,内环控制器参数设计完成后,简化并作为外环的一个调控环节,进行外环设计。
6.所述的电流环,其输入为速度环pi调整后的输出参考电流,此参考电流与电流反馈值的差值经过pi调整后输出电流,该输出电流与电机的转矩成正比。
7.所述的电流环,在运行时首先会通过电流传感器测得伺服电机的u、v、w三相电流,然后经过clarke变换计算得到正交的两相电流,再经过park变换获得电机当前的d、q轴电流;d、q轴电流分别与各自的给定值(0、电流给定值)相减,获得各自的误差值,该误差值通过pi控制器计算出当前修正的d、q轴电压,最终通过park及clarke逆变换得到u、v、w的三相电压目标值,然后经三相电桥逆变生成最终的u、v、w三相电压然后驱动电机。
8.所述的速度环,速度环的输入(即速度参考值)为位置环pi调节的输出,位置给定的前馈值为参考速度;此参考速度与解码器反馈值的差值,经pi调整,输出为电流环的参考电流。
9.所述的速度环bp-pi调整,设置有反向神经网络调节器,反向神经网络调节器按照
算法训练,为pi调整提供最优的kp、ki组合。
10.所述的位置环,位置环的输入为外部脉冲,外部脉冲经过平滑滤波处理和电子齿轮计算后作为参考位置,该参考位置与位置环反馈值的差值是在位置环中经过pi调整后,输出一个参考速度给速度控制环。
11.所述的电源,其电源经过电压转换器,转换为分别适用于驱动器的电压和适用于控制系统的电压。
12.所述的电流反馈为电机a、b、c三相电流;速度反馈为永磁同步电机转子的角速度;位置反馈为电机转子的转角,通过转子角度计算作动筒位移。
13.本发明的有益效果在于:本发明设计了一套可用于控制飞机副翼的机电制动器的控制系统,本专利的重点是利用三环控制回
路
来改善飞
行
器控制系统的死区现象。内环采用积分增益(pi)控制器对速度和电流进
行
补偿,外环采用位置控制器消除飞
行
面的位置差,可显着改善控制系统的动静态响应特性。
14.设计了一套ema伺服驱动系统,选取永磁同步电机直接驱动滚柱丝杠的作动方案。永磁同步电机相比于直流电机而言,有诸多优点:如体积更小、转动惯量更低、效率更高、更容易实现全数字化控制等。
15.同时本申请使用反向神经网络对速度环pi控制器进行参数整定,通过网络的学习来优化pi控制器参数,实现最佳的kp、ki组合输出,提高了机电作动器的抗干扰性能及安全性。
附图说明
16.图1为本发明机电作动器串级控制回路示意图。
具体实施方式
17.实施例1,提供一种用于飞机副翼的高性能机电作动器,涉及电控技术领域,包括电压变换器、功率转换器、电流传感器、无刷直流电机、旋转变压器、解码器、bp-pi控制系统。控制系统经过自动计算及参数调制后将信号发送至功率转换器,功率转换器按控制功率驱动永磁同步电机,进而控制输出转矩,从而实现线性控制。直线执
行
器通过减速后驱动丝杠进行直线运动。电流反馈通过电流传感器采集信号传输至控制系统,解码器将转子的转速和角度按要求反馈至控制系统。
18.所述的控制器为pi控制器,其控制回路采用三个嵌套环构成,由内而外依次为电流环、速度环、位置环,内环控制器参数设计完成后,简化并作为外环的一个调控环节,进行外环设计。
19.所述的电流环,其输入为速度环bp-pi调整后的输出参考电流,此参考电流与电流反馈值的差值经过pi调整后输出电流到永磁同步电机。
20.所述的电流环,在运行时首先会通过电流传感器测得伺服电机的u、v、w三相电流,然后经过clarke变换计算得到正交的两相电流,再经过park变换获得电机当前的d、q轴电流。d、q轴电流分别与各自的给定值(0、电流给定值)相减,获得各自的误差值,该误差值通过pi控制器计算出当前修正的d、q轴电压,最终通过park及clarke逆变换得到uvw的三相电
压目标值,然后经三相电桥逆变生成最终的uvw三相电压然后驱动伺服电机。
21.所述的速度环,速度环的输入(速度设定值)为位置环pi调节的输出,位置给定的前馈值为参考速度;此参考速度与速度环反馈值的差值,经pi调整,输出为电流环的参考电流。
22.所述的pi调整,还设置有反向神经网络调节器,反向神经网络调节器按照算法训练,为pi调整提供最优的kp、ki组合。
23.所述的位置环,位置环的输入为外部脉冲,外部脉冲经过平滑滤波处理和电子齿轮计算后作为参考位置,该参考位置与位置环反馈值的差值是在速度环中经过位置环的pi调整后,输出一个参考速度给速度控制环。
24.所述的电源,其电源经过电压转换器,转换为分别适用于驱动器的电压和适用于控制系统的电压。
25.所述的电流反馈为电机a、b、c三相电流;速度反馈为永磁同步电机转子的角速度;位置反馈为电机转子的转角,通过转子角度计算作动筒位移。
技术特征:
1.一种用于飞机副翼的高性能机电作动器,涉及电控技术领域,包括电压变换器、功率转换器、电流传感器、无刷直流电机、旋转变压器、解码器、bp-pi控制系统;控制系统经过自动计算及参数调制后将信号发送至功率转换器,功率转换器按控制功率驱动永磁同步电机,进而控制输出转矩,从而实现线性控制;直线执
行
器通过减速后驱动丝杠进行直线运动;电流反馈通过电流传感器采集信号传输至控制系统,解码器将转子的转速和角度按要求反馈至控制系统。2.根据权利要求1所述的一种用于飞机副翼的机电作动器,其特征在于,所述的控制器为pi控制器,其控制回路采用三个嵌套环构成,由内而外依次为电流环、速度环、位置环,内环控制器参数设计完成后,简化并作为外环的一个调控环节,进行外环设计。3.根据权利要求2所述的一种用于飞机副翼的机电作动器,其特征在于,所述的电流环,其输入为速度环pi调整后的输出参考电流,此参考电流与电流反馈值的差值经过pi调整后输出电流,该输出电流与电机的转矩成正比。4.根据权利要求3所述的一种用于飞机副翼的机电作动器,其特征在于,所述的电流环,在运行时首先会通过电流传感器测得伺服电机的u、v、w三相电流,然后经过clarke变换计算得到正交的两相电流,再经过park变换获得电机当前的d、q轴电流;d、q轴电流分别与各自的给定值相减,获得各自的误差值,该误差值通过pi控制器计算出当前修正的d、q轴电压,最终通过park及clarke逆变换得到u、v、w的三相电压目标值,然后经三相电桥逆变生成最终的u、v、w三相电压然后驱动电机。5.根据权利要求4所述的一种用于飞机副翼的机电作动器,其特征在于,所述的速度环,速度环的输入,即速度参考值,为位置环pi调节的输出,位置给定的前馈值为参考速度;此参考速度与解码器反馈值的差值,经pi调整,输出为电流环的参考电流。6.根据权利要求5所述的一种用于飞机副翼的机电作动器,其特征在于,所述的速度环bp-pi调整,设置有反向神经网络调节器,反向神经网络调节器按照算法训练,为pi调整提供最优的kp、ki组合。7.根据权利要求6所述的一种用于飞机副翼的机电作动器,其特征在于,所述的位置环,位置环的输入为外部脉冲,外部脉冲经过平滑滤波处理和电子齿轮计算后作为参考位置,该参考位置与位置环反馈值的差值是在位置环中经过pi调整后,输出一个参考速度给速度控制环。8.根据权利要求7所述的一种用于飞机副翼的机电作动器,其特征在于,所述的电源,其电源经过电压转换器,转换为分别适用于驱动器的电压和适用于控制系统的电压。9.根据权利要求8所述的一种用于飞机副翼的机电作动器,其特征在于,所述的电流反馈为电机a、b、c三相电流;速度反馈为永磁同步电机转子的角速度;位置反馈为电机转子的转角,通过转子角度计算作动筒位移。
技术总结
一种用于飞机副翼的高性能机电作动器,涉及电控技术领域,包括电压变换器、功率转换器、电流传感器、无刷直流电机、旋转变压器、解码器、BP-PI控制系统。控制器系统中速度环采用反向神经网络积分增益控制器对速度和电流进行补偿,外环采用位置控制器消除飞行面的位置差,可显着改善控制系统的动静态响应特性,选取永磁同步电机直接驱动滚柱丝杠的作动方。本发明的有益效果在于:使用基于BP-PI控制系统的机电作动器替换液压作动器,在减轻重量、提升效率及提高可靠性的同时,可以有效客服环境干扰,提升EMA系统整体伺服性能。提升EMA系统整体伺服性能。提升EMA系统整体伺服性能。
技术研发人员:尹香兰 何艺 范学琼 史杰
受保护的技术使用者:国网青海省电力公司 国家电网有限公司
技术研发日:2022.09.01
技术公布日:2022/10/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1