光伏组件清洁方法和清洁机器人与流程
本涉及清洁设备,具体地,涉及一种光伏组件清洁方法和基于该光伏组件清洁方法的清洁机器人。
背景技术:
1、太阳能电池使用一段时间后会有灰尘覆盖于太阳能电池的表面,一方面影响太阳能电池的发电效率,另一方面影响太阳能电池的散热效率,所以需要定期对太阳能电池的表面清扫,相关技术中的光伏组件清洁方法对太阳能电池进行清扫的效率不高。
技术实现思路
1、本发明是基于发明人对以下事实和问题的发现和认识做出的:
2、相关技术中的光伏组件清洁方法设定好清洁路径和清洁策略后,对电站场地中的多个光伏组件具有相同的清扫策略,当多个光伏板上的积灰情况不同时,容易清洁不彻底或过度清洁,从而影响对电站场地中的多个光伏组件的清洁效率。
3、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的实施例提出一种光伏组件清洁方法,该光伏组件清洁方法具有场地适应性好、清洁效率较高的优点。
4、本发明实施例的光伏组件清洁方法包括以下步骤:
5、s1:获得光伏场地的场地信息;
6、s2:根据所述场地信息规划所述光伏场地内多个光伏板的整体清扫路径;
7、s3:沿着所述整体清扫路径对多个所述光伏板依次清扫,且每个所述光伏板的清扫包括以下步骤:
8、s31:获得单个所述光伏板的表面信息,所述表面信息包括积灰厚度;
9、s32:根据所述表面信息规划单个所述光伏板的局部清扫路径和清扫速度,其中,所述清扫速度和所述积灰厚度呈负相关;
10、s33:按照所述清扫速度并沿着所述局部清扫路径对单个所述光伏板进行至少一次清扫。
11、本发明实施例的光伏组件清洁方法具有场地适应性好、清洁效率较高的优点。
12、在一些实施例中,在步骤s33中,根据所述积灰厚度确定对单个所述光伏板进行清扫的次数,且所述积灰厚度和单个所述光伏板的清扫的次数呈正相关。
13、在一些实施例中,若所述积灰厚度小于设定阈值,则对单个所述光伏板进行单次清扫,若所述积灰厚度大于设定阈值,则对单个所述光伏板进行多次清扫。
14、在一些实施例中,所述表面信息包括图像信息,所述积灰厚度根据所述图像信息的颜色深浅度获得。
15、在一些实施例中,在所述步骤s31中,在距离每个所述光伏板相同的高度位置进行至少部分所述表面信息的采集。
16、在一些实施例中,在所述步骤s3中,在沿所述整体清扫路径对多个所述光伏板进行清扫时,首先清扫相邻的两个所述光伏板的其中一者,然后清扫其中另一者。
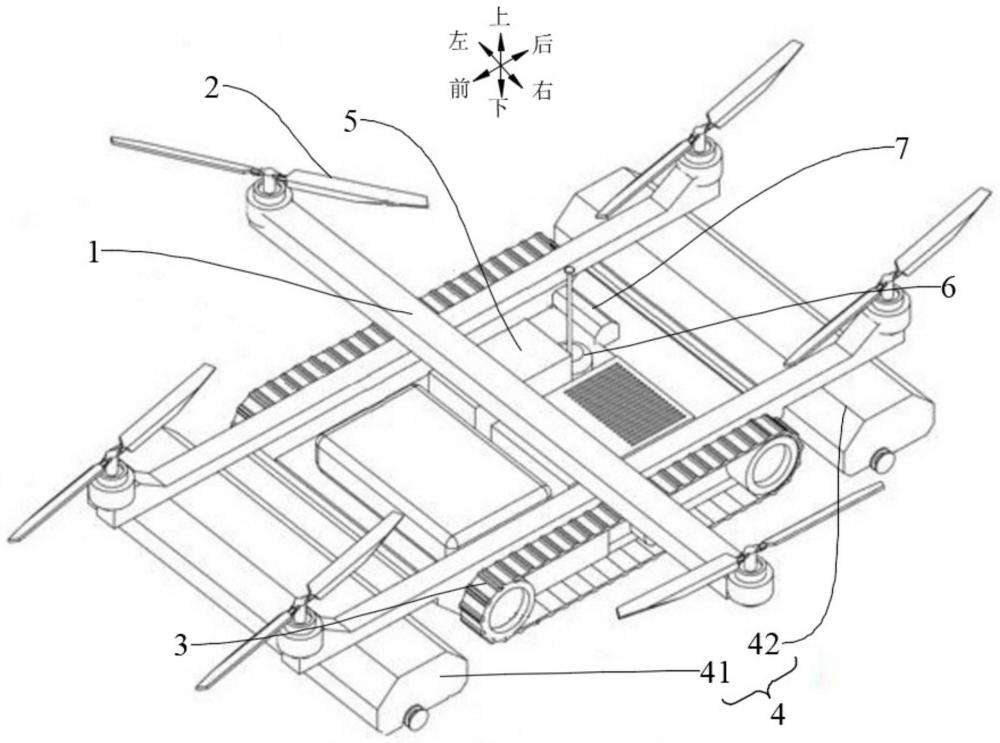
17、本发明实施例的清洁机器人基于上述任一项实施例所述的光伏组件清洁方法,所述清洁机器人包括机架;飞行组件,所述飞行组件设于所述机架以适于驱动所述清洁机器人飞行;行走组件和清扫组件,所述行走组件设于所述机架,所述清扫组件设于所述机架并与所述行走组件间隔布置,所述行走组件适于驱动所述清扫组件沿所述光伏板的表面行走;感知组件,所述感知组件设于所述机架,且所述感知组件适于获取光伏场地的场地信息。
18、在一些实施例中,所述清扫组件包括第一组件和第二组件,所述第一组件设于所述行走组件行进方向上的一侧,所述第二组件设于所述行走组件行进方向上的另一侧。
19、在一些实施例中,所述清洁机器人包括控制组件,所述感知组件、所述飞行组件、所述行走组件和所述清扫组件分别与所述控制组件电连接,所述控制组件适于根据所述感知组件获得光伏场地的场地信息并控制所述飞行组件、所述行走组件和所述清扫组件。
20、在一些实施例中,所述清洁机器人包括通信组件,所述通信组件设于所述机架并与所述控制组件电连接,所述通信组件适于与所述远程操控设备远程连接以远程操控设备远程控制所述控制组件。
21、在一些实施例中,其特征在于,所述清洁机器人包括电源组件,所述电源组件可拆卸地设于所述机架以适于为所述清洁机器人提供电源。
技术特征:
1.一种光伏组件清洁方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的光伏组件清洁方法,其特征在于,在步骤s33中,根据所述积灰厚度确定对单个所述光伏板进行清扫的次数,且所述积灰厚度和单个所述光伏板的清扫的次数呈正相关。
3.根据权利要求2所述的光伏组件清洁方法,其特征在于,若所述积灰厚度小于设定阈值,则对单个所述光伏板进行单次清扫,若所述积灰厚度大于设定阈值,则对单个所述光伏板进行多次清扫。
4.根据权利要求1所述的光伏组件清洁方法,其特征在于,所述表面信息包括图像信息,所述积灰厚度根据所述图像信息的颜色深浅度获得。
5.根据权利要求1所述的光伏组件清洁方法,其特征在于,在所述步骤s31中,在距离每个所述光伏板相同的高度位置进行至少部分所述表面信息的采集。
6.根据权利要求1-5中任一项所述的光伏组件清洁方法,其特征在于,在所述步骤s3中,在沿所述整体清扫路径对多个所述光伏板进行清扫时,首先清扫相邻的两个所述光伏板的其中一者,然后清扫其中另一者。
7.一种基于权利要求1-6中任一项所述的光伏组件清洁方法的清洁机器人,其特征在于,包括:
8.根据权利要求7所述的清洁机器人,其特征在于,所述清扫组件包括第一组件和第二组件,所述第一组件设于所述行走组件行进方向上的一侧,所述第二组件设于所述行走组件行进方向上的另一侧。
9.根据权利要求8所述的清洁机器人,其特征在于,包括控制组件,所述感知组件、所述飞行组件、所述行走组件和所述清扫组件分别与所述控制组件电连接,所述控制组件适于根据所述感知组件获得光伏场地的场地信息并控制所述飞行组件、所述行走组件和所述清扫组件。
10.根据权利要求9所述的清洁机器人,其特征在于,包括通信组件,所述通信组件设于所述机架并与所述控制组件电连接,所述通信组件适于与所述远程操控设备远程连接以远程操控设备远程控制所述控制组件。
技术总结
本发明公开了一种光伏组件清洁方法和基于该光伏组件清洁方法的清洁机器人,所述光伏组件清洁方法包括以下步骤:获得光伏场地的场地信息;根据所述场地信息规划所述光伏场地内多个光伏板的整体清扫路径;沿着所述整体清扫路径对多个所述光伏板依次清扫,且每个所述光伏板的清扫包括以下步骤:获得单个所述光伏板的表面信息,所述表面信息包括积灰厚度;根据所述表面信息规划单个所述光伏板的局部清扫路径和清扫速度,其中,所述清扫速度和所述积灰厚度呈负相关;按照所述清扫速度并沿着所述局部清扫路径对单个所述光伏板进行至少一次清扫。本发明实施例的光伏组件清洁方法具有场地适应性好、清洁效率较高的优点。
技术研发人员:陈炼,田道贵,韩昆,郑童申,杨雨薇
受保护的技术使用者:国家电投集团科学技术研究院有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!