基于VR的配网带电一体化作业方法及系统与流程
本发明涉及配网带电作业,具体地涉及一种基于vr的配网带电一体化作业方法及一种基于vr的配网带电一体化作业系统。
背景技术:
1、电力基础设施网络是稳定供电的基础,规模庞大且完善的电力基础设施网络是保证电力生产配送安全,促进电力企业良性循环的必要条件。除此之外,电力基础设施网络的运行稳定性同样直接影响着供电稳定性和安全性,只有在电力基础设施网络构建完善和运维稳定的双重保证下,供电网络的供电能力才能满足用户需求。目前进行电力基础设施网络运维,主要方式为人工带电检修作业。随着电力基础设施网络的建设规模越来越大,现有的运维作业方法将越来越无法满足需求,且其存在的安全性问题,一直无法解决。针对现有电力基础设施网络运维作业存在的安全风险高、作业难度大和作业效率低的问题,需要创造一种新的配网带电一体化作业方法。
技术实现思路
1、本发明实施方式的目的是提供一种基于vr的配网带电一体化作业方法,以至少解决现有电力基础设施网络运维作业存在的安全风险高、作业难度大和作业效率低的问题。
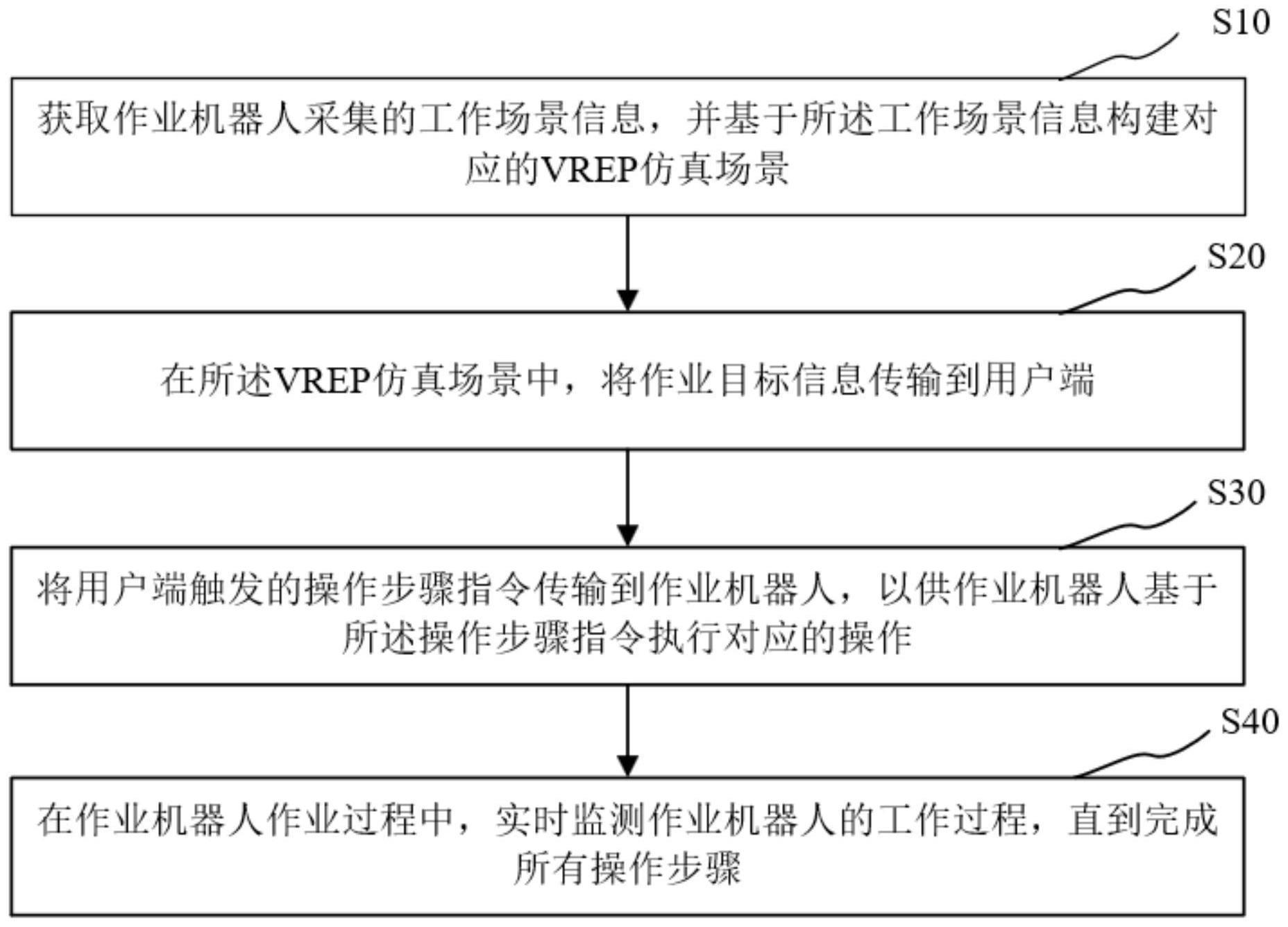
2、为了实现上述目的,本发明第一方面提供一种基于vr的配网带电一体化作业方法,所述方法包括:获取作业机器人采集的工作场景信息,并基于所述工作场景信息构建对应的vrep仿真场景;在所述vrep仿真场景中,将作业目标信息传输到用户端;将用户端触发的操作步骤指令传输到作业机器人,以供作业机器人基于所述操作步骤指令执行对应的操作;在作业机器人作业过程中,实时监测作业机器人的工作过程,直到完成所有操作步骤。
3、可选的,所述工作场景信息包括:作业环境信息、作业目标图像信息和作业目标位置信息;其中,所述作业环境信息包括:作业高度信息、作业温度信息、作业风力信息和作业能见度信息。
4、可选的,所述作业目标图像信息包括多角度作业目标图像信息;所述基于所述工作场景信息构建对应的vrep仿真场景,包括:基于多角度作业目标图像信息构建对应的vrep仿真场景。
5、可选的,还包括:将作业目标信息传输到用户端的同时,对所述作业目标进行特征识别,并基于特征识别结果进行操作步骤预测,获得所有操作步骤预测项;将所有操作步骤预测项与作业目标信息同步传输到用户端。
6、可选的,在作业机器人基于所述操作步骤指令执行对应的操作之前,所述方法还包括:进行作业机器人初始化,包括:设备初始化、设备动作调试和设备动作精度调式。
7、可选的,在作业机器人基于所述操作步骤指令执行对应的操作过程中,所述方法还包括:响应于用户端的操作干预指令,将所述操作干预指令实时转发到机器人端;所述操作干预指令具有高于操作步骤指令的执行优先级。
8、可选的,所述实时监测作业机器人的工作过程,包括:实时采集机器人的操作过程视频信息和操作动作日志信息;将所述操作过程视频信息和所述操作动作日志信息缓存到监测库中,并基于缓存信息生成实时操作全景图像信息;将所述实时操作全景图像信息同步到用户端。
9、本发明第二方面提供一种基于vr的配网带电一体化作业系统,所述系统包括:通信单元,用于获取作业机器人采集的工作场景信息;处理单元,用于基于所述工作场景信息构建对应的vrep仿真场景;所述通信单元还用于:在所述vrep仿真场景中,将作业目标信息传输到用户端;将用户端触发的操作步骤指令传输到作业机器人,以供作业机器人基于所述操作步骤指令执行对应的操作;监测单元,用于在作业机器人作业过程中,实时监测作业机器人的工作过程,直到完成所有操作步骤。
10、可选的,所述监测单元包括:视频采集模块,设置在预设无人机上和作业机器人机械臂上,用于监测作业机器人的操作过程视频信息;日志模块,用于记录作业机器人的操作动作日志信息。
11、另一方面,本发明提供一种计算机可读储存介质,该计算机可读存储介质上储存有指令,其在计算机上运行时使得计算机执行上述的基于vr的配网带电一体化作业方法。
12、通过上述技术方案,本发明方案通过使用tcp协议连接在同一个局域网内的带电作业机器人,实时获取机器人各个传感器数据,监控机械臂当前位姿并显示在交互界面中。同时在vrep建立仿真场景,实时获取仿真场景的各项数据,通过仿真场景判断作业轨迹是否计算正确。在带电作业机器人平台上放置多个监控相机,通过局域网将实时视频流传输至交互界面,作为现场操作人员的实时监控画面。在此基础上,制定各项带电作业的作业步骤,通过的每项作业页面,最终实现机器人每项带电作业。本发明方案解决了现有电力基础设施网络运维作业存在的安全风险高、作业难度大和作业效率低的问题。
13、本发明实施方式的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种基于vr的配网带电一体化作业方法,其特征在于,所述方法包括:
2.根据权利要求1上所述的方法,其特征在于,所述工作场景信息包括:
3.根据权利要求2所述的方法,其特征在于,所述作业目标图像信息包括多角度作业目标图像信息;
4.根据权利要求1所述的方法,其特征在于,还包括:
5.根据权利要求1所述的方法,其特征在于,在作业机器人基于所述操作步骤指令执行对应的操作之前,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,在作业机器人基于所述操作步骤指令执行对应的操作过程中,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,所述实时监测作业机器人的工作过程,包括:
8.一种基于vr的配网带电一体化作业系统,其特征在于,所述系统包括:
9.根据权利要求8所述的系统,其特征在于,所述监测单元包括:
10.一种计算机可读储存介质,该计算机可读存储介质上储存有指令,其在计算机上运行时使得计算机执行权利要求1-7中任一项权利要求所述的基于vr的配网带电一体化作业方法。
技术总结
本发明实施例提供一种基于VR的配网带电一体化作业方法及系统,属于配网带电作业技术领域。所述方法包括:获取作业机器人采集的工作场景信息,并基于所述工作场景信息构建对应的VREP仿真场景;在所述VREP仿真场景中,将作业目标信息传输到用户端;将用户端触发的操作步骤指令传输到作业机器人,以供作业机器人基于所述操作步骤指令执行对应的操作;在作业机器人作业过程中,实时监测作业机器人的工作过程,直到完成所有操作步骤。本发明方案解决了现有电力基础设施网络运维作业存在的安全风险高、作业难度大和作业效率低的问题。
技术研发人员:邢应春,郭祥,胡俊伟,单晓锋,甄武东,韩先国,唐旭明,董二宝
受保护的技术使用者:国网安徽省电力有限公司淮南供电公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!