空间矢量调制方法、计算机存储介质及电机逆变器与流程
本发明涉及电机力矩调制领域,更具体而言,本发明涉及一种电机力矩的空间矢量调制方法,一种包括执行该方法的计算机程序指令的计算机存储介质,以及一种利用该空间矢量调制方法控制电机力矩的电机逆变器。
背景技术:
1、在新能源车辆(如电动车辆)中,空间矢量脉宽调制技术(space-vector plusewidth modulation,简称“svpwm”)由于其较高的直流母线电压利用率、较小的谐波含量以及利于数字化实现的特点而越来越多地应用在各种电气控制系统中,例如,在电机逆变器中,利用svpwm技术调节电机的输出力矩。
2、在实际应用中,至少存在以下的问题之一:
3、为了提高电机逆变器的输出电压以在电机控制中增大电机的输出力矩,通常需要使用到过调制技术,然而,由于在发生过调制现象时,空间矢量落在非线性调制区域,对应的计算难度大,采用现有的过调制方法大多计算方法较为复杂,并且不太适用于车辆中现有的处理器,现有的过调制技术在工程上的实际应用仍然面临很大的挑战,还存在逆变器/整个系统高效率使用的情况下力矩精度无法保证的问题。
技术实现思路
1、有鉴于此,根据本发明的第一方面,提出了一种电机力矩的空间矢量调制方法,该方法包括下述步骤:
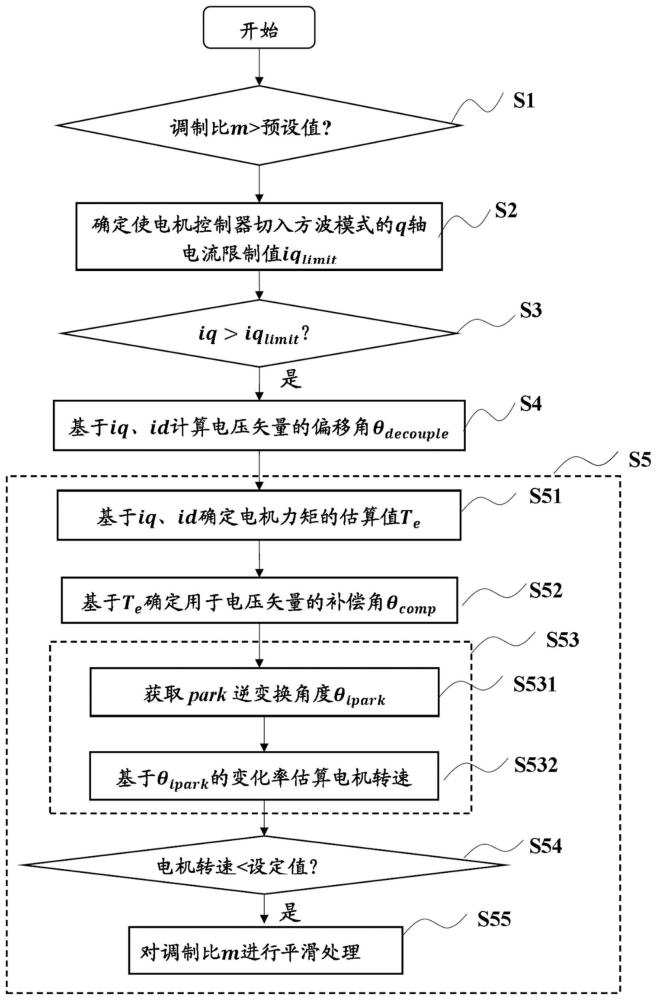
2、s1:获取电机逆变器的调制比m,并判断该调制比m是否超过预设值;
3、s2:如果所述调制比m超过所述预设值,则确定使电机逆变器切入方波模式的q轴电流限制值iqlimit;
4、s3:判断电机当前的q轴电流iq是否大于所述q轴电流限制值iqlimit;
5、s4:如果电机当前的q轴电流iq大于所述q轴电流限制值iqlimit,则使电机逆变器切入方波模式,并基于电机当前的q轴电流iq和d轴电流id计算电压矢量ur的偏移角θdecouple;以及
6、s5:基于计算得出的电压矢量ur的偏移角θdecouple调节电机在该方波模式下的输出力矩。
7、根据一个有利的实施例,在所述方波模式下,所述电压矢量ur的幅值为恒定值,并且通过调节该电压矢量ur的相位来调节电机的输出力矩。
8、根据一个有利的实施例,所述步骤s5包括:确定电机逆变器在方波模式下的电压矢量ur的目标矢量角θ,并且基于该目标矢量角来调节电压矢量ur的相位。
9、根据一个有利的实施例,在所述方波模式下,采用力矩闭环反馈控制或转速闭环反馈控制的方式来间接调节所述电压矢量ur的目标矢量角θ。
10、根据一个有利的实施例,所述力矩闭环反馈控制涉及如下步骤:
11、s51:基于所述q轴电流iq和d轴电流id确定电机力矩的估算值te;和
12、s52:基于电机力矩的估算值te与给定值之差确定用于所述电压矢量的补偿角θcomp。
13、根据一个有利的实施例,该转速闭环反馈控制涉及下述步骤:
14、s53:确定当前的电机转速;
15、s54:判断当前的电机转速是否低于设定值;以及
16、s55:如果当前的电机转速低于设定值,则对方波模式下的电机逆变器的调制比m进行平滑处理。
17、根据一个有利的实施例,所述步骤s53包括:
18、s531:利用角度传感器获取电压矢量ur的park逆变换角度θipark;和
19、s532:基于所获取的park逆变换角度θipark的变化率δθipark来估算电机转速。
20、根据一个有利的实施例,该方法还包括:
21、基于电压矢量ur的偏移角θdecouple、补偿角θcomp以及park逆变换角度θipark之和来确定电机逆变器在方波模式下的电压矢量ur的目标矢量角θ,并且基于该目标矢量角θ来调节电压矢量ur的相位。
22、根据本发明的第二方面,还提出了一种计算机存储介质,在该计算机存储介质上存储有计算机程序指令,该计算机程序指令在被处理器执行时实施如上所述的空间矢量调制方法的各个步骤。
23、根据本发明的第三方面,还提出了一种电机逆变器,该电机逆变器利用如上所述的空间矢量调制方法来调节电机的输出力矩。
24、根据本发明的空间矢量调制方法,通过开环控制得到电压矢量的偏移角,随后输入力矩以执行力矩闭环反馈控制,从而间接调节电压矢量角,最终使电机实现方波模式下的稳定运行。该空间矢量调制方法尤其可应用于pmsm电机逆变器中,该电机逆变器可利用根据本发明的空间矢量调制方法来调节电机的输出力矩。总之,根据本发明的空间矢量调制方法能够实现以下优点中的至少一者:
25、–该空间矢量调制方法在过调制区能够保证磁场定向的准确性,并且在方波模式下能够将力矩控制精度保持在允许的误差范围内,因此,该方法不仅能够保证电机逆变器在全转速和全功率范围的最大能力输出,还能够提高力矩控制精度,并且能够抑制在过调制过程中产生的电流波动、力矩脉振以及由电流波动所带来的电磁噪音;
26、-相比于传统的过调制方法来说,根据本发明的空间矢量调制方法简化了原算法的运算量,提高了代码的执行效率,芯片资源占用少;以及
27、-该空间矢量调制方法在工程中易于实现且直观,具有很强的鲁棒性和通用性,能够容易地移植到其他应用场合。
技术特征:
1.一种电机力矩的空间矢量调制方法,其特征在于,该方法包括下述步骤:
2.根据权利要求1所述的空间矢量调制方法,其特征在于,在所述方波模式下,所述电压矢量ur的幅值为恒定值,并且通过调节该电压矢量ur的相位来调节电机的输出力矩。
3.根据权利要求2所述的空间矢量调制方法,其特征在于,所述步骤s5包括:确定电机逆变器在方波模式下的电压矢量ur的目标矢量角θ,并且基于该目标矢量角来调节电压矢量ur的相位。
4.根据权利要求3所述的空间矢量调制方法,其特征在于,
5.根据权利要求4所述的空间矢量调制方法,其特征在于,所述力矩闭环反馈控制涉及如下步骤:
6.根据权利要求5所述的空间矢量调制方法,其特征在于,该转速闭环反馈控制涉及下述步骤:
7.根据权利要求6所述的空间矢量调制方法,其特征在于,所述步骤s53包括:
8.根据权利要求7所述的空间矢量调制方法,其特征在于,该方法还包括:
9.一种计算机存储介质,在该计算机存储介质上存储有计算机程序指令,该计算机程序指令在被处理器执行时实施根据权利要求1至8中任一项所述的空间矢量调制方法的各个步骤。
10.一种电机逆变器,其特征在于,该电机逆变器利用根据权利要求1至8中任一项所述的空间矢量调制方法来调节电机的输出力矩。
技术总结
本发明涉及一种电机力矩的空间矢量调制方法,包括:获取电机逆变器的调制比m,并判断该调制比m是否超过预设值;如果所述调制比m超过所述预设值,则确定使电机逆变器切入方波模式的q轴电流限制值iq<subgt;limit</subgt;;判断电机当前的q轴电流iq是否大于所述q轴电流限制值iq<subgt;limit</subgt;;如果电机当前的q轴电流iq大于所述q轴电流限制值iq<subgt;limit</subgt;,则使电机逆变器切入方波模式,并基于电机当前的q轴电流iq和d轴电流id计算电压矢量U<subgt;r</subgt;的偏移角θ<subgt;decouple</subgt;;以及基于计算得出的电压矢量U<subgt;r</subgt;的偏移角θ<subgt;decouple</subgt;调节电机在该方波模式下的输出力矩。本发明还涉及包括执行该方法的计算机程序指令的计算机存储介质,和利用该空间矢量调制方法控制电机力矩的电机逆变器。
技术研发人员:丁杨
受保护的技术使用者:纬湃科技投资(中国)有限公司
技术研发日:
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!