机器人自动充电系统、充电装置和机器人的制作方法
本申请涉及机器人充电,具体而言,涉及一种机器人自动充电系统、充电装置和机器人。
背景技术:
1、随着机器人技术的不断发展,越来越多的智能工厂需要配置大量机器人运输物料。目前,机器人的电池续航能力不足,仅能支撑大约半天到一天的时间,因此,需要频繁的更换电池或者接上充电器进行充电。
2、然而,在机器人数量较多的情况下,需要较多的人力对机器人更换电池或充电,耗费大量人力,也无法达到智能工厂的自动化需求。
技术实现思路
1、本实用新型提供一种机器人自动充电系统,以解决需较多人力维护机器人充电,耗费人力、成本高等问题。
2、本实用新型的实施例是这样实现的:
3、一种机器人自动充电系统,包括:
4、机器人、充电装置和中控模块,所述中控模块通信连接所述机器人和所述充电装置;
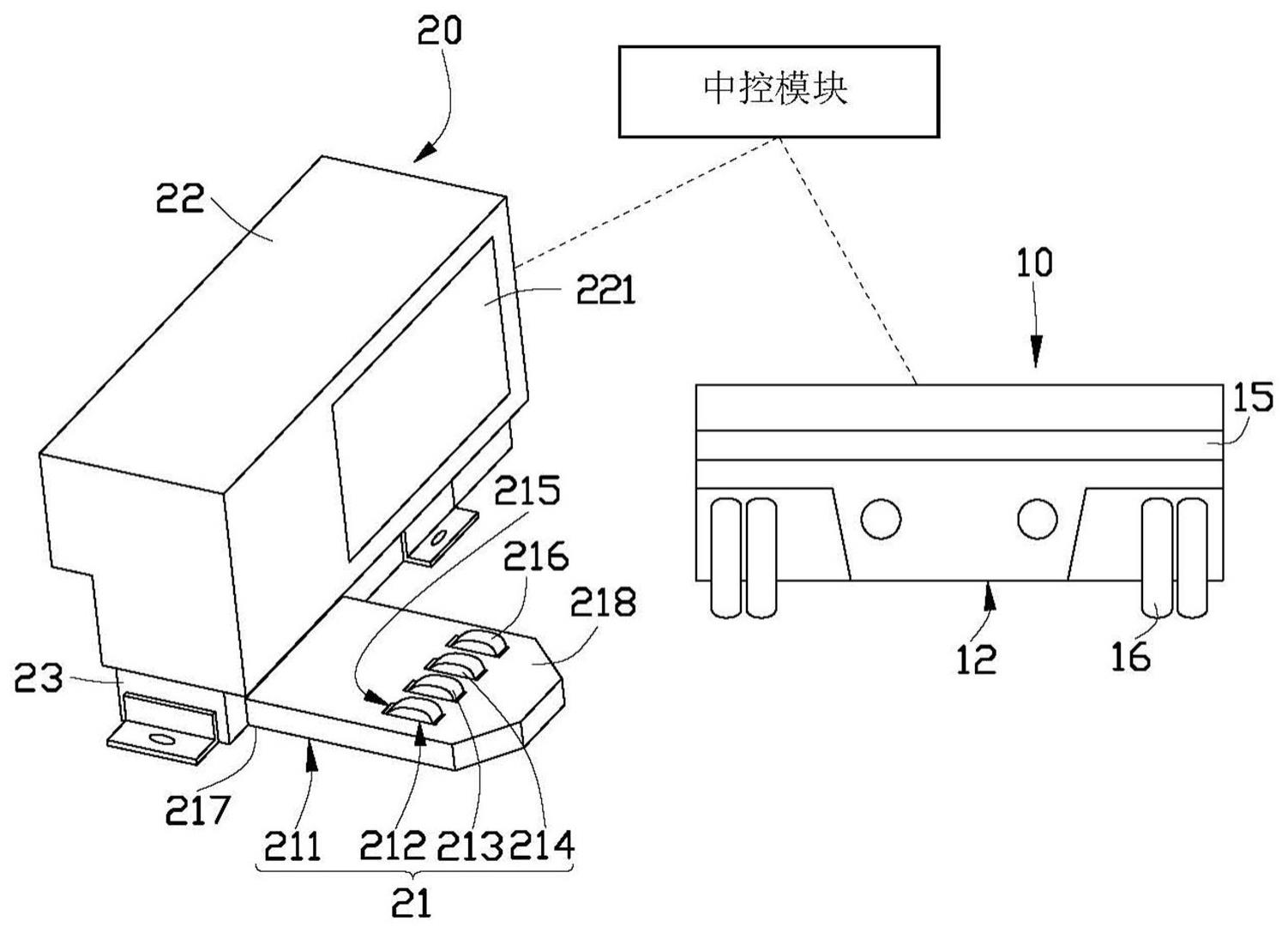
5、所述充电装置包括第一充电组件,所述第一充电组件包括第一充电底板、充电端口、第一检测端口和第二检测端口,所述充电端口、所述第一检测端口和所述第二检测端口间隔设置在所述第一充电底板一侧;
6、所述机器人包括第二充电组件、底盘、控制模块和导航模块,所述第二充电组件设置在所述底盘一侧,所述第二充电组件包括充电导电件、第一检测导电件和第二检测导电件,所述充电导电件、所述第一检测导电件和所述第二检测导电件分别电连接所述充电端口、所述第一检测端口和所述第二检测端口,所述中控模块电连接所述导航模块,所述导航模块用于控制所述机器人自动寻路至所述充电装置,所述控制模块电连接所述第二充电组件,所述控制模块用于控制所述第二充电组件连通至所述第一充电组件。
7、在一种可能的实施方式中,所述充电端口包括第一充电端口和第二充电端口,所述第一检测端口为第一电平检测端口,所述第二检测端口为第二电平检测端口,所述第一充电端口、第一电平检测端口、所述第二检测端口和所述第二充电端口依次间隔设置,所述第一检测端口的电平大于等于所述第二检测端口的电平,所述第一充电端口和所述第二充电端口设置在所述第一充电底板的相对两端。
8、在一种可能的实施方式中,所述充电导电件包括第一充电导电件和第二充电导电件,所述第一充电导电件、所述第一检测导电件、所述第二检测导电件和第二充电导电件依次间隔设置,所述第一充电导电件和所述第二充电导电件设置在所述底盘的相对两端。
9、在一种可能的实施方式中,所述第二充电组件包括还包括连接件和储电组件,所述第一充电导电件、所述第一检测导电件、所述第二检测导电件和所述第二充电导电件分别通过所述连接件电连接所述储电组件。
10、在一种可能的实施方式中,所述第一充电导电件、所述第一检测导电件、所述第二检测导电件和所述第二充电导电件可拆卸连接所述底盘。
11、在一种可能的实施方式中,所述机器人还包括控制开关,所述控制开关电连接所述第二充电组件和所述储电组件之间。
12、在一种可能的实施方式中,所述第一充电导电件、所述第一检测导电件、所述第二检测导电件和所述第二充电导电件的形状分别与所述第一充电端口、所述第一检测端口、所述第二检测端口和所述第二充电端口的形状相匹配。
13、本申请实施例还提供一种充电装置,包括充电主体和第一充电组件,所述充电主体用于提供电量,所述第一充电组件凸设于所述充电主体一侧,所述第一充电组件包括第一充电底板、充电端口、第一检测端口和第二检测端口,所述充电端口、第一检测端口和第二检测端口间隔设置在所述第一充电底板一侧。
14、本申请实施例还提供一种机器人,包括底盘、第二充电组件、控制模块和导航模块,所述第二充电组件包括充电导电件、第一检测导电件和第二检测导电件,所述充电导电件、所述第一检测导电件和所述第二检测导电件间隔设于所述底盘一侧,所述导航模块用于控制所述机器人自动寻路至外部充电设备,所述控制模块电连接所述第二充电组件和所述外部充电设备。
15、本实用新型实施例提供一种机器人自动充电系统、充电装置和机器人,充电装置的第一充电组件与机器人的第二充电组件相匹配,然后,使用中控模块电连接导航模块,最后机器人可以基于导航模块,自动寻路至充电装置进行充电。该机器人自动充电系统,避免需人为手工更换机器人电池而造成效率低、成本高等问题。
技术特征:
1.一种机器人自动充电系统,包括机器人、充电装置和中控模块,所述中控模块通信连接所述机器人和所述充电装置,其特征在于,
2.如权利要求1所述的机器人自动充电系统,其特征在于,所述充电端口包括第一充电端口和第二充电端口,所述第一检测端口为第一电平检测端口,所述第二检测端口为第二电平检测端口,所述第一充电端口、第一电平检测端口、所述第二检测端口和所述第二充电端口依次间隔设置,所述第一检测端口的电平大于等于所述第二检测端口的电平,所述第一充电端口和所述第二充电端口设置在所述第一充电底板的相对两端。
3.如权利要求1所述的机器人自动充电系统,其特征在于,所述充电导电件包括第一充电导电件和第二充电导电件,所述第一充电导电件、所述第一检测导电件、所述第二检测导电件和第二充电导电件依次间隔设置,所述第一充电导电件和所述第二充电导电件设置在所述底盘的相对两端。
4.如权利要求3所述的机器人自动充电系统,其特征在于,所述第二充电组件包括还包括连接件和储电组件,所述第一充电导电件、所述第一检测导电件、所述第二检测导电件和所述第二充电导电件分别通过所述连接件电连接所述储电组件。
5.如权利要求3所述的机器人自动充电系统,其特征在于,所述第一充电导电件、所述第一检测导电件、所述第二检测导电件和所述第二充电导电件可拆卸连接所述底盘。
6.如权利要求4所述的机器人自动充电系统,其特征在于,所述机器人还包括控制开关,所述控制开关电连接所述第二充电组件和所述储电组件之间。
7.如权利要求3所述的机器人自动充电系统,其特征在于,所述第一充电导电件、所述第一检测导电件、所述第二检测导电件和所述第二充电导电件的形状分别与所述第一充电端口、所述第一检测端口、所述第二检测端口和所述第二充电端口的形状相匹配。
8.一种充电装置,包括充电主体,所述充电主体用于提供电量,其特征在于,还包括第一充电组件,所述第一充电组件凸设于所述充电主体一侧,所述第一充电组件包括第一充电底板、充电端口、第一检测端口和第二检测端口,所述充电端口、第一检测端口和第二检测端口间隔设置在所述第一充电底板一侧。
9.一种机器人,其特征在于,包括底盘、第二充电组件、控制模块和导航模块,所述第二充电组件包括充电导电件、第一检测导电件和第二检测导电件,所述充电导电件、所述第一检测导电件和所述第二检测导电件间隔设于所述底盘一侧,所述导航模块用于控制所述机器人自动寻路至外部充电设备,所述控制模块电连接所述第二充电组件和所述外部充电设备。
技术总结
本申请提供一种机器人自动充电系统,旨在解决智能工厂中机器人由于电池续航能力不足,且无法自动充电等问题。机器人自动充电系统包括机器人、充电装置和中控模块,中控模块通信连接机器人和充电装置;充电装置用于为机器人提供电量;机器人包括控制模块和导航模块,中控模块电连接导航模块,导航模块用于控制机器人自动寻路至充电装置,控制模块电连接第二充电组件,控制模块用于控制第二充电组件连通至第一充电组件。本技术的有益效果是机器人可自动寻路至充电装置,无需人为手工对机器人进行充电,降低成本,提高充电效率。
技术研发人员:谌彦丞
受保护的技术使用者:富泰京精密电子(烟台)有限公司
技术研发日:20220914
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!