一种蜗轮蜗杆电机旋转阻尼器机构的制作方法
本技术涉及门体开关门运动的,具体为一种蜗轮蜗杆电机旋转阻尼器机构。
背景技术:
1、目前,各类智能机器人的开门方式多种多样,由内开门的,比较占用内部存储空间,由外开门的,但是不是单门单控,或者不能外后侧收缩,开门比较占用前部或者两侧的空间;因而由电机直驱牵引杆机构的门因开关门占地面积小被广泛应用;
2、但是由电机直驱牵引杆机构的门,在牵引杆牵引的开关门到位后,由于牵引杆与硬限位的直接接触的反作用力作用,电机容易发生堵转,进而引起蜗轮蜗杆电机内的部的齿轮组件被破坏。
技术实现思路
1、针对现有技术存在的不足,本实用新型目的是提供一种蜗轮蜗杆电机旋转阻尼器机构,可以解决现有由于牵引杆与硬限位的直接接触的反作用力作用,电机容易发生堵转,进而引起蜗轮蜗杆电机内的部的齿轮被破坏的问题。
2、为了实现上述目的,本实用新型是技术方案如下:
3、本实用新型是通过如下的技术方案来实现:一种蜗轮蜗杆电机旋转阻尼器机构,
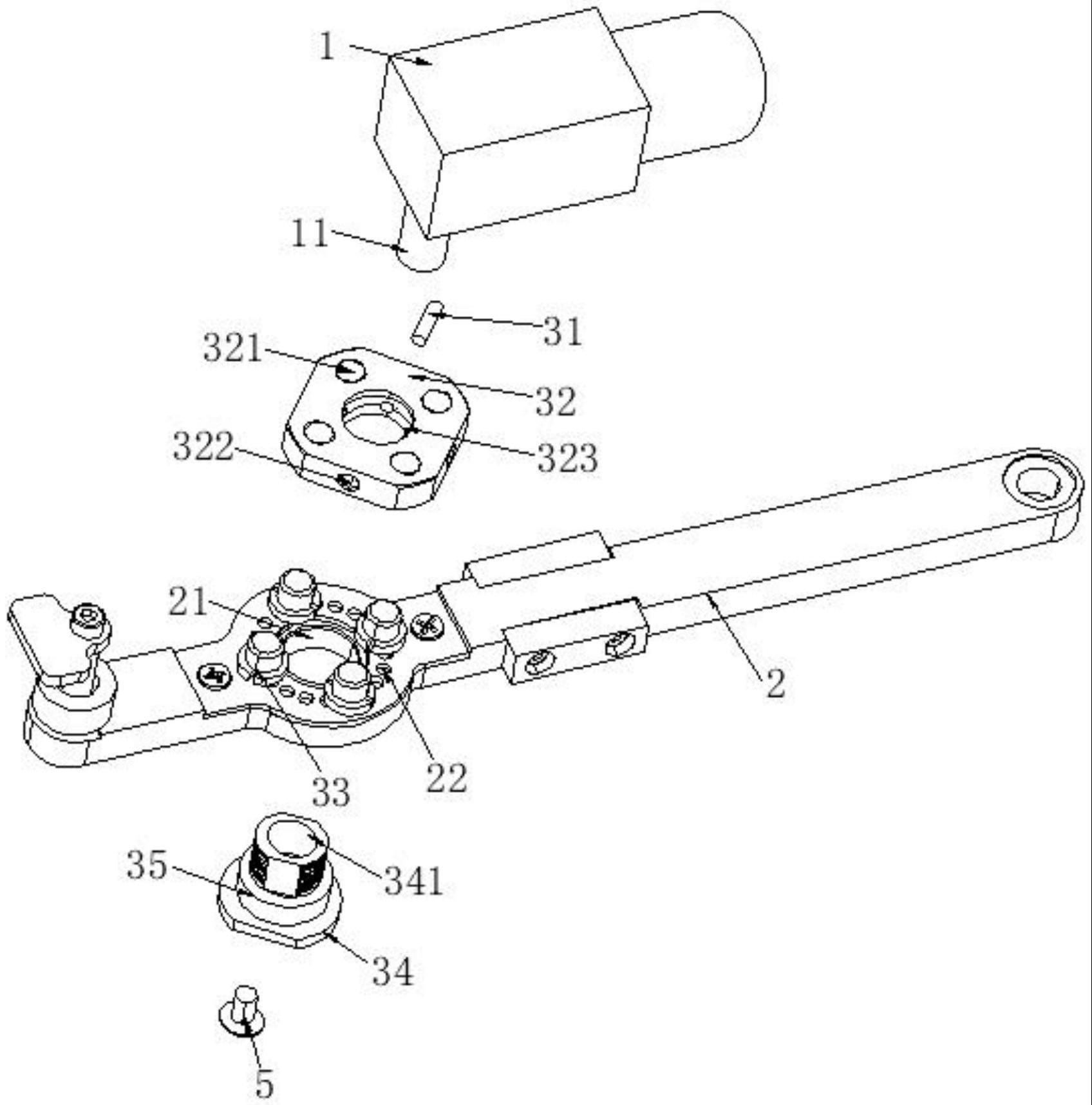
4、包括牵引杆和蜗轮蜗杆电机,所述牵引杆与所述蜗轮蜗杆电机之间通过阻尼器连接;所述阻尼器包括紧定螺钉、锁紧螺母、玻珠螺钉、阻尼环;所述牵引杆的表面开设通孔,且所述通孔四周分布球窝;所述通孔的内部贯穿阻尼环,且所述阻尼环的顶端连接锁紧螺母;所述锁紧螺母的连接玻珠螺钉,且所述玻珠螺钉的底端配合连接球窝;所述阻尼环的内部开设插孔,所述蜗轮蜗杆电机的输出轴贯穿插孔;且所述输出轴的底端连接限位螺钉;所述锁紧螺母的侧部插入紧定螺钉。
5、进一步的,所述通孔的四周呈环形阵列等距分布球窝,且所述球窝设有24个。
6、进一步的,所述锁紧螺母呈矩形结构,且所述锁紧螺母的表面四角处分布有四个第一螺纹孔;所述第一螺纹孔螺纹连接玻珠螺钉。
7、进一步的,所述锁紧螺母的中心处开设第三螺纹孔,且所述第三螺纹孔螺纹连接阻尼环;所述锁紧螺母的侧部均开设第二螺纹孔,且所述第二螺纹孔螺纹连接紧定螺钉。
8、进一步的,所述玻珠螺钉包括玻珠和螺钉杆,所述螺钉杆的端部设有玻珠;所述螺钉杆螺纹连接第一螺纹孔,所述玻珠配合连接球窝。
9、进一步的,所述阻尼器还包括铜轴套,且所述铜轴套套接在所述阻尼环的外部。
10、进一步的,所述阻尼环采用一端为空心的圆柱、一端为圆盘的结构,且所述圆柱和圆盘结构的外侧均设有平切面;所述圆柱结构的平切面处不设有螺纹槽。
11、与现有技术相比,本实用新型的有益效果包括:
12、本实用新型通过阻尼器使得蜗轮蜗杆电机与牵引杆进行连接,牵引杆受阻尼器内部球窝摩擦力进行旋转运动,带动门体进行开关门动作,当门体开关门到位后,由于球窝摩擦力小于蜗轮蜗杆电机扭矩力,所以牵引杆停止转动,而蜗轮蜗杆电机输出轴则能继续转动,因此,蜗轮蜗杆电机内的齿轮组件不会受大于扭矩的阻力,实现保护蜗轮蜗杆电机不会堵转和断齿,避免蜗轮蜗杆电机内部齿轮组件被破坏。
技术特征:
1.一种蜗轮蜗杆电机旋转阻尼器机构,其特征在于:包括
2.根据权利要求1所述的一种蜗轮蜗杆电机旋转阻尼器机构,其特征在于:所述通孔(21)的四周呈环形阵列等距分布球窝(22),且所述球窝(22)设有24个。
3.根据权利要求1所述的一种蜗轮蜗杆电机旋转阻尼器机构,其特征在于:所述锁紧螺母(32)呈矩形结构,且所述锁紧螺母(32)的表面四角处分布有四个第一螺纹孔(321);所述第一螺纹孔(321)螺纹连接玻珠螺钉(33)。
4.根据权利要求1所述的一种蜗轮蜗杆电机旋转阻尼器机构,其特征在于:所述锁紧螺母(32)的中心处开设第三螺纹孔(323),且所述第三螺纹孔(323)螺纹连接阻尼环(34);所述锁紧螺母(32)的侧部均开设第二螺纹孔(322),且所述第二螺纹孔(322)螺纹连接紧定螺钉(31)。
5.根据权利要求3所述的一种蜗轮蜗杆电机旋转阻尼器机构,其特征在于:所述玻珠螺钉(33)包括玻珠(331)和螺钉杆(332),所述螺钉杆(332)的端部设有玻珠(331);所述螺钉杆(332)螺纹连接第一螺纹孔(321),所述玻珠(331)配合连接球窝(22)。
6.根据权利要求1所述的一种蜗轮蜗杆电机旋转阻尼器机构,其特征在于:所述阻尼器(3)还包括铜轴套(35),且所述铜轴套(35)套接在所述阻尼环(34)的外部。
7.根据权利要求1所述的一种蜗轮蜗杆电机旋转阻尼器机构,其特征在于:所述阻尼环(34)采用一端为空心的圆柱、一端为圆盘的结构,且所述圆柱和圆盘结构的外侧均设有平切面;所述圆柱结构的平切面处不设有螺纹槽。
技术总结
本技术提供一种蜗轮蜗杆电机旋转阻尼器机构,包括牵引杆和蜗轮蜗杆电机,所述牵引杆与所述蜗轮蜗杆电机之间通过阻尼器连接;所述阻尼器包括紧定螺钉、锁紧螺母、玻珠螺钉、阻尼环;所述牵引杆的表面开设通孔,且所述通孔四周分布球窝;所述通孔的内部贯穿阻尼环,且所述阻尼环的顶端连接锁紧螺母;所述锁紧螺母的连接玻珠螺钉,且所述玻珠螺钉的底端配合连接球窝;所述阻尼环的内部开设插孔,所述蜗轮蜗杆电机的输出轴贯穿插孔;且所述输出轴的底端连接限位螺钉;所述锁紧螺母的侧部插入紧定螺钉;本技术实现保护蜗轮蜗杆电机不会堵转和断齿,避免蜗轮蜗杆电机内部齿轮组件被破坏。
技术研发人员:洪健
受保护的技术使用者:苏州立构机器人有限公司
技术研发日:20221122
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!