具备位置记忆的伺服电机驱动控制装置的制作方法
本技术涉及一种驱动控制装置,尤其是一种具备位置记忆的伺服电机驱动控制装置。
背景技术:
1、目前,对国内外工业门的开门机,市场主流技术是三相/单相交流电机驱动或交流变频电机驱动。前者技术简单,末级通常用继电器控制,但不能软启动以及软停止。后者可软起动以及软停止,速度可调,是目前较为高端的产品。采用交流变频电机驱动时,限位结构有机械限位和绝对值编码器限位,其中,绝对值编码器限位安装在门体中心轴端或减速箱上的编码器专用轴端。
2、和伺服电机比较,传统电机控制存在精度不高,体积大,笨重,效率不高等问题,而伺服电机可以轻易实现恒扭或稳速控制,这些更是传统开门机所无法比拟的。
3、标准伺服控制中,在马达转子轴上安装有光电编码器,以实现高精度位置控制和速度控制。当应用于开门机时,似乎可以用伺服电机上的光电编码器来做高精度位置记忆,但问题在于光电编码器是增量型计数器,当停电时,门体有任何移动都会导致位置出错,即无法实现停电下的位置记忆。
4、由此,在采用伺服电机控制时,如何能有效实现位置记忆,是目前急需解决的技术难题。
技术实现思路
1、本实用新型的目的是克服现有技术中存在的不足,提供一种具备位置记忆的伺服电机驱动控制装置,其在采用伺服电机驱动控制时,可有效实现位置记忆,提高开门机驱动控制的可靠性。
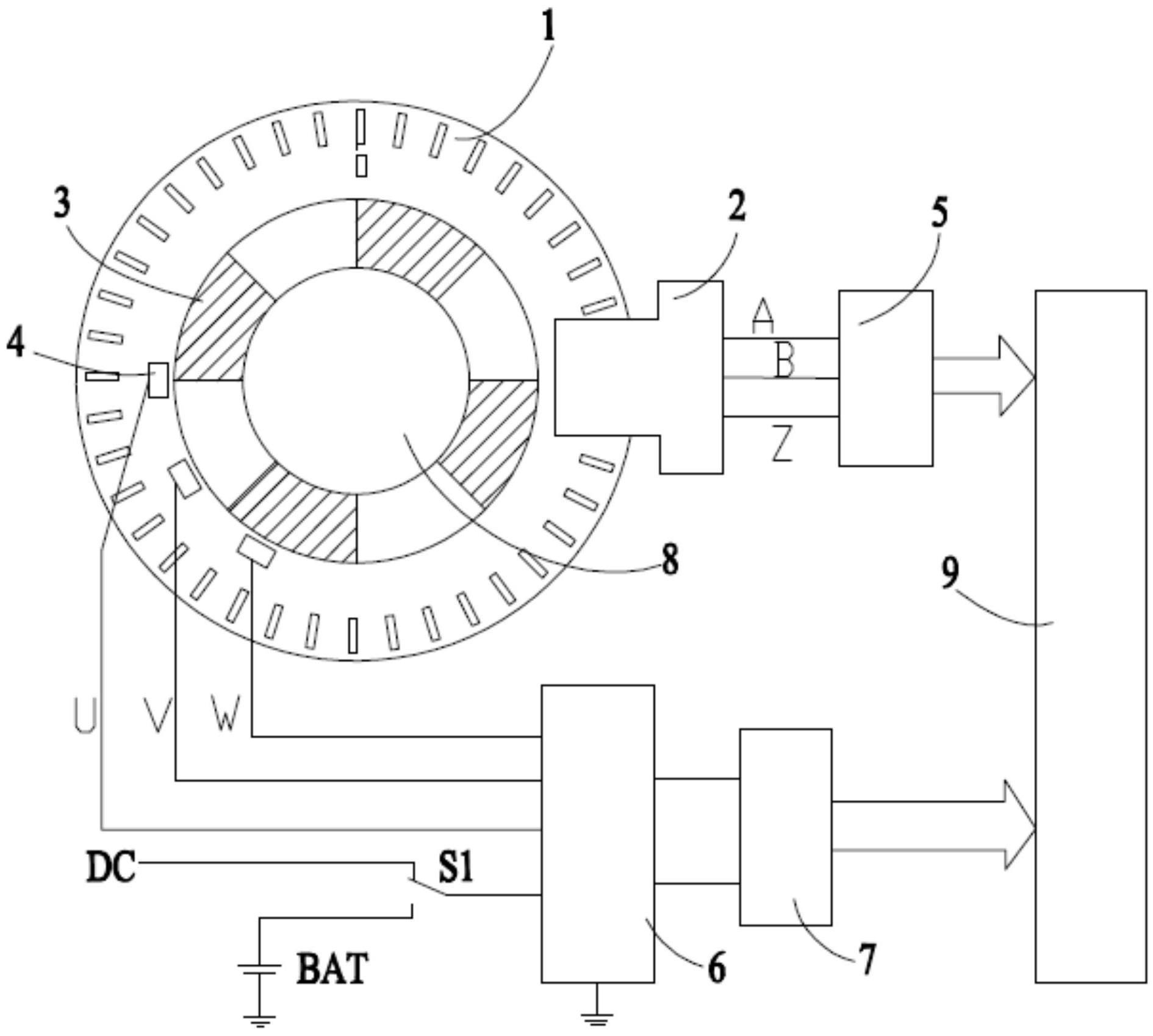
2、按照本实用新型提供的技术方案,一种具备位置记忆的伺服电机驱动控制装置,包括伺服电机,
3、还包括用于位置记忆的位置记忆单元,其中,所述位置记忆单元包括用于获取在非市电供电下伺服电机输出轴转动信息的输出轴转动信息记录单元、用于供电切换的供电切换单元以及与转动信息记录单元适配连接的信号采集转换单元;
4、伺服电机断电时,控制供电切换单元切换对输出轴转动信息采集单元供电,信号采集转换单元对输出轴转动信息记录单元所记录的输出轴转动信息采样、存储并转换;
5、伺服电机重新上电工作时,主控制器读取信号采集转换单元转换存储的输出轴转动信息,并基于所读取输出轴转动信息配置当前位置信息,以利用所配置的当前位置信息对伺服电机进行驱动控制。
6、还包括与伺服电机适配的光电编码器,其中,
7、对所述光电编码器,包括固定于伺服电机输出轴上的光电编码盘以及与所述光电编码盘适配的光电编码光耦单元。
8、还包括与光电编码光耦单元适配连接的光电编码差分处理电路与主控制器适配电连接,其中,
9、所述光电编码差分处理电路包括光电编码差分处理芯片ic1,光电编码差分处理芯片ic1的型号为am26ls31c;
10、光电编码差分处理芯片ic1的4a端与光电传感器u1内光电三极管的集电极端以及电阻r4的一端连接,光电编码差分处理芯片ic1的2a端与电阻r3的一端连接,光电编码差分处理芯片ic1的1a端与电阻r2的一端以及光电传感器u1内光电三极管的发射极端连接;
11、电阻r2的另一端、电阻r3的另一端、电阻r4的另一端以及光电传感器u1内发光二极管的阳极端与电容c1一端、电容c2的一端以及电源vcc连接,电容c1的另一端、电容c2的另一端以及光电传感器u1内发光二极管的阴极端接地。
12、所述输出轴转动信息记录单元包括固定于伺服电机输出轴上的磁极对组以及与磁极对组适配的霍尔传感器组,其中,
13、霍尔传感器组与信号采集转换单元适配连接,供电切换单元通过信号采集转换单元为霍尔传感器组供电。
14、所述磁极对组包括四对均匀对称分布于伺服电机输出轴上的磁极体;
15、霍尔传感器组包括三个霍尔传感器。
16、所述供电切换单元包括二极管d1、二极管d2以及二极管d3,其中,
17、二极管d1的阳极端与电池bat连接,二极管d2的阳极端与5v的市电dc连接,二极管d2的阴极端与电容c10的一端、电容c11的一端、电阻r14的一端以及二极管d3的阳极端连接,二极管d3的阴极端以及二极管d1的阴极端与信号采集转换单元适配连接,
18、电容c10的另一端、电容c11的另一端以及电阻r14的另一端均接地,且二极管d1的阴极端以及二极管d3的阳极端均与电源vcc连接。
19、还包括低电量检测电路,其中,
20、所述低电量检测电路包括npn三极管q1,npn三极管q1的发射极端接地,npn三极管的基极端与电阻r19连接,npn三极管q1的集电极端与电阻r17的一端连接,电阻r17的另一端与电阻r16的一端、电容c15的一端以及电量采集端连接;
21、电容c15的另一端接地,电阻r16的另一端与电池bat的输出端连接。
22、所述信号采集转换单元将所采集的输出轴转动信息转换为rs485信号,并经485通讯模块与主控制器适配连接。
23、对485通讯模块,包括
24、485通讯芯片ic2,所述485通讯芯片ic2采用型号为sp485ee的芯片,485通讯芯片ic2的ro端与电阻r6的一端以及电阻r9的一端连接,485通讯芯片ic2的di端与电阻r8的一端以及电阻r10的一端连接,电阻r9的另一端以及电阻r10的另一端接地,电阻r6的另一端与ut1rx端连接,电阻r8的另一端与ut1tx端连接;
25、485通讯芯片ic2的vcc端与电源vcc、电容c3的一端以及电容c6的一端连接,电容c3的另一端以及电容c6的另一端接地;
26、485通讯芯片ic2的b端与电阻r1的一端、电阻r7的一端、电容c7的一端、电容c8的一端、保护二极管芯片zd1的一端以及ps-连接端连接,电容r1的另一端以及电容c7的另一端均接地;
27、485通讯芯片ic2的a端与电阻r7的另一端、电阻r11的一端、电容c8的另一端、电容c9的一端、保护二极管芯片zd1的另一端以及ps+连接端连接,电阻r11的另一端与电源vcc连接,电容c9的另一端均接地。
28、本实用新型的优点:伺服电机断电时,控制供电切换单元切换对输出轴转动信息采集单元供电,信号采集转换单元对输出轴转动信息记录单元所记录的输出轴转动信息采样、存储并转换;当伺服电机重新上电工作时,主控制器读取信号采集转换单元转换存储的输出轴转动信息,并基于所读取输出轴转动信息配置当前位置信息,以利用所配置的当前位置信息对伺服电机进行驱动控制,即可有效实现位置记忆,提高开门机驱动控制的可靠性。
技术特征:
1.一种具备位置记忆的伺服电机驱动控制装置,包括伺服电机,其特征是:
2.根据权利要求1所述具备位置记忆的伺服电机驱动控制装置,其特征是:还包括与伺服电机适配的光电编码器,其中,
3.根据权利要求2所述具备位置记忆的伺服电机驱动控制装置,其特征是:还包括与光电编码光耦单元适配连接的光电编码差分处理电路与主控制器适配电连接,其中,
4.根据权利要求2或3所述具备位置记忆的伺服电机驱动控制装置,其特征是:所述输出轴转动信息记录单元包括固定于伺服电机输出轴上的磁极对组以及与磁极对组适配的霍尔传感器组,其中,
5.根据权利要求4所述具备位置记忆的伺服电机驱动控制装置,其特征是:所述磁极对组包括四对均匀对称分布于伺服电机输出轴上的磁极体;
6.根据权利要求4所述具备位置记忆的伺服电机驱动控制装置,其特征是:所述供电切换单元包括二极管d1、二极管d2以及二极管d3,其中,
7.根据权利要求6所述具备位置记忆的伺服电机驱动控制装置,其特征是:还包括低电量检测电路,其中,
8.根据权利要求4所述具备位置记忆的伺服电机驱动控制装置,其特征是:所述信号采集转换单元将所采集的输出轴转动信息转换为rs485信号,并经485通讯模块与主控制器适配连接。
9.根据权利要求8所述具备位置记忆的伺服电机驱动控制装置,其特征是:对485通讯模块,包括
技术总结
本技术涉及一种具备位置记忆的伺服电机驱动控制装置。其包括伺服电机,还包括位置记忆单元,其中,所述位置记忆单元包括输出轴转动信息记录单元、供电切换单元以及信号采集转换单元;伺服电机断电时,控制供电切换单元切换对输出轴转动信息采集单元供电,信号采集转换单元对输出轴转动信息记录单元所记录的输出轴转动信息采样、存储并转换;伺服电机重新上电工作时,主控制器读取信号采集转换单元转换存储的输出轴转动信息,并基于所读取输出轴转动信息配置当前位置信息,以利用所配置的当前位置信息对伺服电机进行驱动控制。本技术在采用伺服电机驱动控制时,可有效实现位置记忆,提高开门机驱动控制的可靠性。
技术研发人员:李翰
受保护的技术使用者:亿腾科技(无锡)有限公司
技术研发日:20221128
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!