一种充电模块、充电桩和移动机器人的制作方法
本申请实施例涉及充电领域,具体涉及一种充电模块、充电桩和移动机器人。
背景技术:
1、随着科学技术的快速发展与人们生活对机器人的需求不断增加,近几年移动机器人取得了快速的发展。相较传统工业机器人,移动机器人具有移动的特点,其工作范围有了显著的增大,可以在一定的场景中移动。因此,移动机器人就需要通过电池进行供电。所以在使用移动机器人过程中就需要考虑电池充电的问题,从充电方式可以分为手动充电和自动充电,手动充电需要人为实现插拔充电模块的动作,通常不需要担心插拔精度对插头造成损坏。但是手动充电需要人为操作,且一般的机器人充电口设置在不方便人操作的位置,所以手动充电存在一些弊端。因此,移动机器人通常还会配置自动充电的功能,通过相应的充电桩与机器人上的充电插头对插实现自动充电。
2、由于移动机器人的运动控制和定位精度存在一定的误差,无法保证机器人的充电插头与充电桩实现比较好的对插,如果两者强行对插,可能导致插头无法顺利插入,或者插入之后相应的零件会受到较大的应力,从而造成充电模块件的损坏。因此,为了实现机器人充电插头与充电桩的精准对接,充电桩需要具有一定的自适应性以消除机器人因位置误差而导致的充电模块对接偏差的问题。市面上现有的充电桩多采用滑块导轨实现充电模块的移动,同时通过弹簧提供一定的自适应性,但是这些充电桩结构的充电模块自适应能力较弱。
技术实现思路
1、本申请实施例提供了一种充电模块、充电桩和移动机器人,用于提高充电模块的自适应能力。
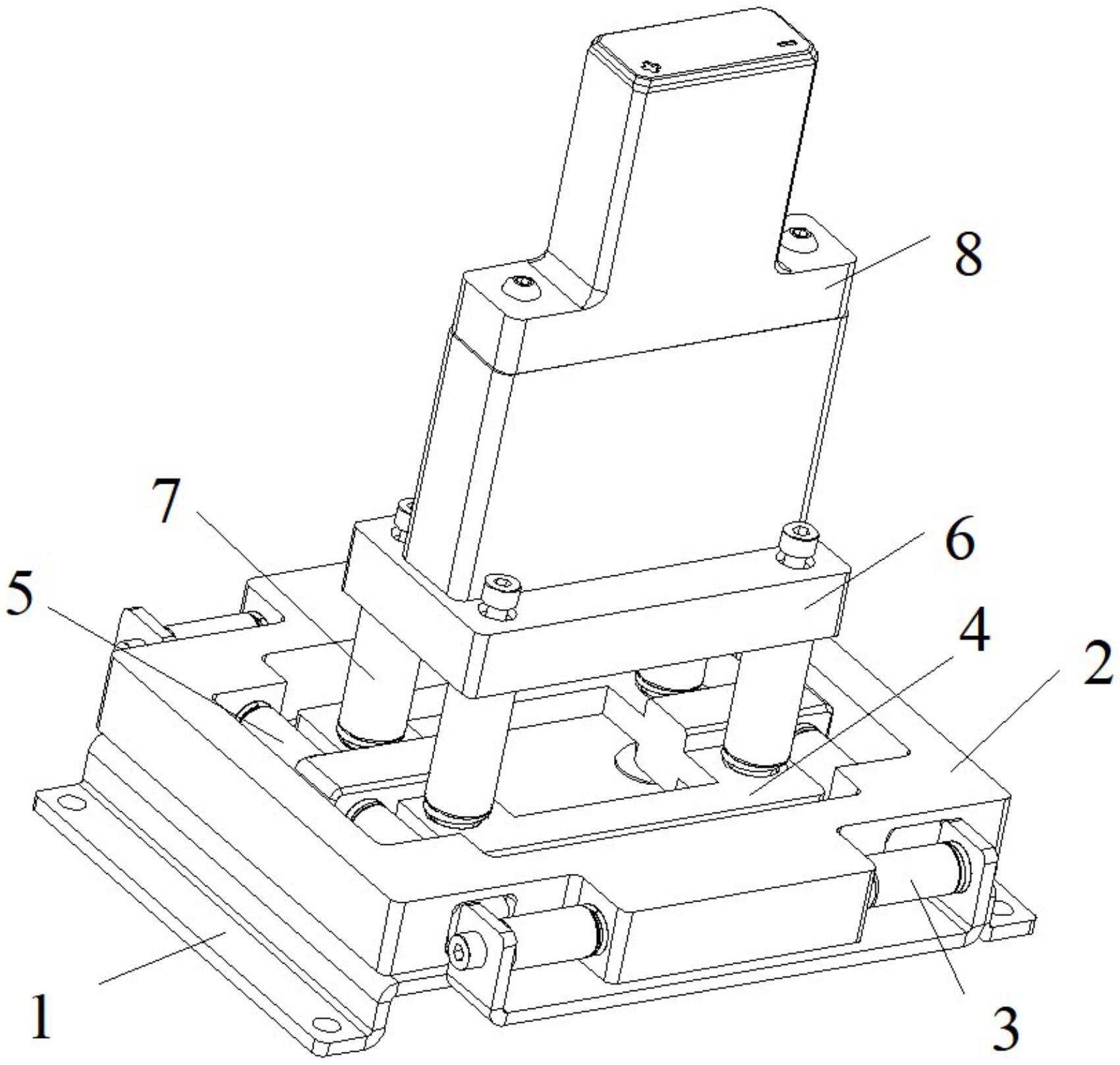
2、本申请实施例第一方面提供了一种充电模块,包括:固定件、第一浮动模块、第二浮动模块、第三浮动模块、第一充电头;
3、充电模块用于连接第一充电设备和第二充电设备;
4、第一浮动模块包括第一浮动块和第一浮动杆,第二浮动模块包括第二浮动块和第二浮动杆,第三浮动模块包括第三浮动块和第三浮动杆;
5、第一浮动杆、第二浮动杆和第三浮动杆可沿各自轴线方向伸缩,第一浮动杆的第一轴线方向、第二浮动杆的第二轴线方向和第三浮动杆的第三轴线方向两两垂直;
6、固定件固定设置在第一充电设备,固定件和第一浮动块通过第一浮动杆连接;
7、第二浮动块和第一浮动块通过第二浮动杆连接;
8、第三浮动块和第二浮动块通过第三浮动杆连接;
9、第三浮动块和第一充电头固定连接,第一充电头用于与第二充电设备的第二充电头电连接。
10、基于本申请实施例第一方面,本申请实施例第一方面的第一种实现方式中,浮动杆包括导向轴和弹簧,导向轴用于限定弹簧沿导向轴轴线方向伸缩。
11、基于本申请实施例第一方面或第一方面的第一种实现方式,本申请实施例第一方面的第二种实现方式中,第一浮动块呈矩形,第一浮动块的第一边和第二边外侧分别设有第一凸起,第一边和第二边为相对的边,第一浮动杆的一端连接第一凸起,第一浮动杆的另一端连接固定件,第一浮动杆的第一轴线方向与第一边平行。
12、基于本申请实施例第一方面、第一方面的第一种实现方式和第二种实现方式任一种,本申请实施例第一方面的第三种实现方式中,第一浮动块内侧镂空,第二浮动块安装在第一浮动块内侧,第二浮动块呈矩形,第二浮动块的第三边和第四边外侧分别设有第二凸起,第三边和第四边为相对的边,第二浮动杆的一端连接第二凸起,第二浮动杆的另一端连接第一边或第二边,第二浮动杆的第二轴线方向与第一边垂直。
13、基于本申请实施例第一方面、第一方面的第一种实现方式至第三种实现方式任一种,本申请实施例第一方面的第四种实现方式中,第二浮动块开设多个第一安装孔,第三浮动杆的一端安装在第一安装孔内,第三浮动杆的另一端安装在第三浮动块。
14、基于本申请实施例第一方面、第一方面的第一种实现方式至第四种实现方式任一种,本申请实施例第一方面的第五种实现方式中,第一安装孔为锥形孔,第一安装孔靠近第三浮动块一侧的内径大于远离第三浮动块一侧的内径,第一安装孔和第三浮动杆之间有间隙。
15、基于本申请实施例第一方面、第一方面的第一种实现方式至第五种实现方式任一种,本申请实施例第一方面的第六种实现方式中,第三浮动杆的第一端设置有球面头,第三浮动杆的第一端安装在第一安装孔,球面头位于第二浮动块远离第三浮动块的一侧。
16、基于本申请实施例第一方面、第一方面的第一种实现方式至第六种实现方式任一种,本申请实施例第一方面的第七种实现方式中,球面头的两侧设有2个相互平行的夹紧面,2个夹紧面与第三浮动杆的第三轴线方向平行。
17、基于本申请实施例第一方面、第一方面的第一种实现方式至第七种实现方式任一种,本申请实施例第一方面的第八种实现方式中,固定件和第一充电头的连线方向与第三轴线方向平行。
18、基于本申请实施例第一方面、第一方面的第一种实现方式至第八种实现方式任一种,本申请实施例第一方面的第九种实现方式中,第一充电头或第二充电头包括磁体。
19、从以上技术方案可以看出,本申请实施例具有以下优点:
20、本申请实施例中,固定件、第一浮动杆、第一浮动块、第二浮动杆、第二浮动块、第三浮动杆、第三浮动块、第一充电头依次连接,其中第一浮动杆可沿第一轴线方向伸缩、第二浮动杆可沿第二轴线方向伸缩、第三浮动杆可沿第三轴线方向伸缩,第一轴线方向、第二轴线方向和第三轴线方向两两垂直,使得第三浮动块相对固定件有三个平移自由度。第一充电头安装在第三浮动块,因此第一充电头相对固定件有三维平移自由度。第一充电头和第二充电头进行配合时,第一充电头能够容纳多个方向上的误差,自适应能力较强。
21、本申请实施例第二方面提供了一种充电桩,包括充电桩主体和如第一方面所述的充电模块。
22、本申请实施例第三方面提供了一种移动机器人,包括机器人主体和如第一方面所述的充电模块。
技术特征:
1.一种充电模块,其特征在于,包括:固定件(1)、第一浮动模块、第二浮动模块、第三浮动模块、第一充电头(8);
2.根据权利要求1所述的充电模块,其特征在于,
3.根据权利要求1所述的充电模块,其特征在于,
4.根据权利要求3所述的充电模块,其特征在于,
5.根据权利要求1所述的充电模块,其特征在于,
6.根据权利要求5所述的充电模块,其特征在于,
7.根据权利要求6所述的充电模块,其特征在于,
8.根据权利要求1所述的充电模块,其特征在于,
9.根据权利要求1所述的充电模块,其特征在于,
10.一种充电桩,其特征在于,包括充电桩主体和如权利要求1至9所述的充电模块。
11.一种移动机器人,其特征在于,包括机器人主体和如权利要求1至9所述的充电模块。
技术总结
本申请实施例提供了一种充电模块、充电桩和移动机器人,用于提高充电模块的自适应能力,充电模块用于连接第一充电设备和第二充电设备;第一浮动杆、第二浮动杆和第三浮动杆可沿各自轴线方向伸缩,第一浮动杆的第一轴线方向、第二浮动杆的第二轴线方向和第三浮动杆的第三轴线方向两两垂直;固定件固定设置在第一充电设备,固定件和第一浮动块通过第一浮动杆连接;第二浮动块和第一浮动块通过第二浮动杆连接;第三浮动块和第二浮动块通过第三浮动杆连接;第三浮动块和第一充电头固定连接。第一充电头相对固定件有三维平移自由度。第一充电头和第二充电头进行配合时,第一充电头能够容纳多个方向上的误差,自适应能力较强。
技术研发人员:丁宁,付雪奇,陈鑫杰,萨山,张爱东
受保护的技术使用者:深圳市人工智能与机器人研究院
技术研发日:20221208
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!