一种机器人充电用稳定机构的制作方法
本技术涉及稳定机构相关,具体为一种机器人充电用稳定机构。
背景技术:
1、在对机器人进行使用的时候,为了保证机器人的持续工作,所以需要在机器人长时间工作后,通过充电桩对其进行充电,在进行充电的时候,需要将机器人移动到充电桩旁边进行限位,从而保证了充电头可以有效的插入到机器人的充电座内,在进行充电的时候,为了保证了充电的稳定,所以需要用到稳定机构,但是现有的稳定机构,只能对充电头和充电座之间进行限位固定,但是由于机器人本身体积较大,容易因为机器人本身的移动,影响充电头和充电座连接的稳定。
2、为此我们提出一种机器人充电用稳定机构。
技术实现思路
1、本实用新型的目的在于提供一种机器人充电用稳定机构,以解决上述背景技术所提出的由于机器人本身体积较大,容易因为机器人本身的移动,影响充电头和充电座连接的稳定问题。
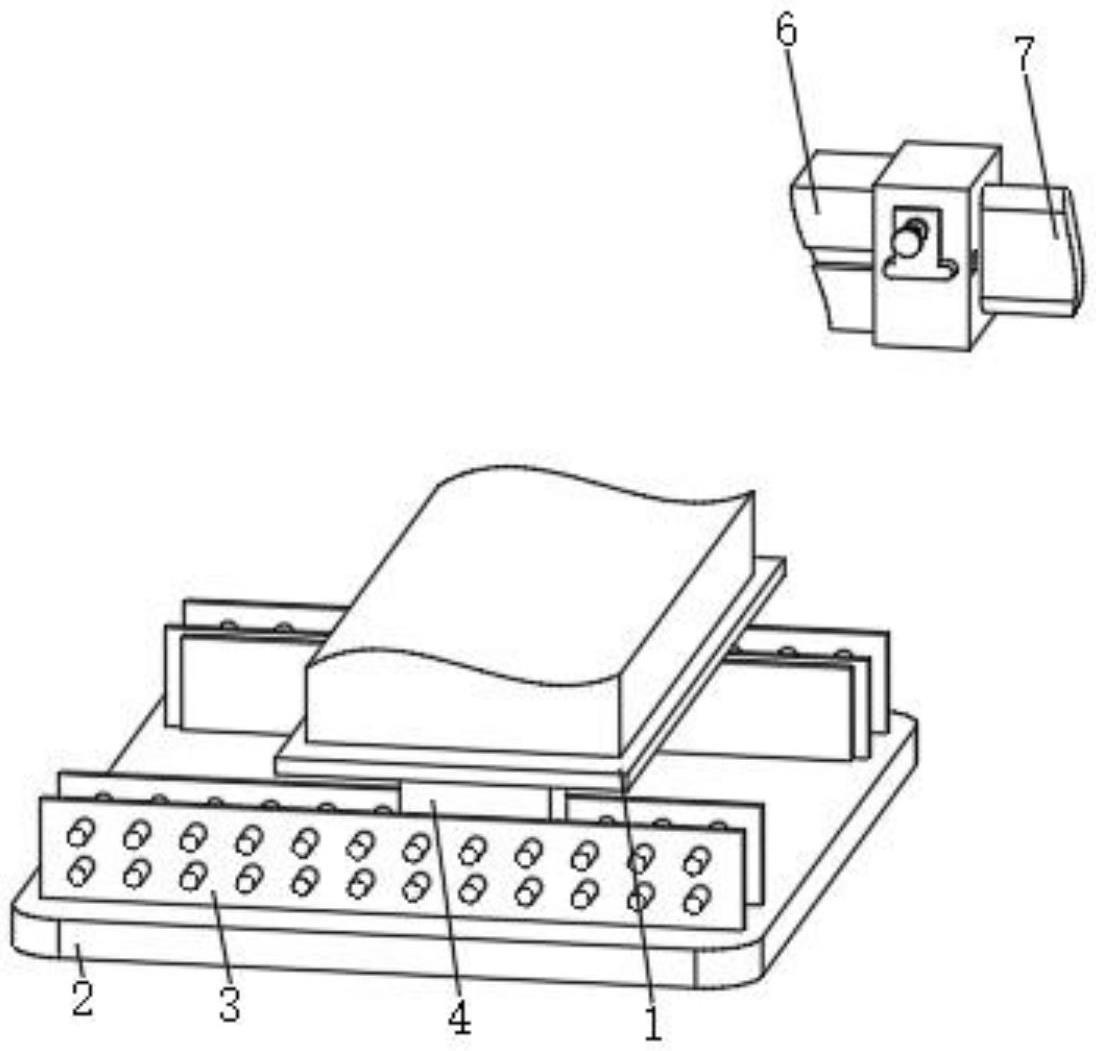
2、为了解决上述技术问题,本实用新型提供如下技术方案:一种机器人充电用稳定机构,包括机器人主体,所述机器人主体的底部设置有充电桩支撑板,所述充电桩支撑板的顶部固定连接有限位滑轨,所述机器人主体的底部固定连接有限位座,所述限位座插入至限位滑轨内,所述充电桩支撑板的顶部设置有限位机构,所述限位机构包括安装板,所述安装板的底部与充电桩支撑板固定,所述安装板的侧边安装有液压缸,所述液压缸的端部固定连接有连接板,所述连接板的侧边固定连接有插杆,所述插杆与限位座和限位滑轨贯穿连接。
3、进一步的,所述机器人主体的顶部侧边设置有充电座,所述充电桩支撑板的顶部相对于充电座的一侧设置有充电头,所述充电头插入至充电座内。
4、进一步的,所述充电头的表面固定连接有固定座,所述固定座表面安装有用于对充电座进行锁紧的锁紧组件。
5、进一步的,所述锁紧组件包括插板,所述充电座和固定座的表面均开设有锁紧槽,所述插板插入至锁紧槽内,所述锁紧槽通过设置调节机构与固定座连接。
6、进一步的,所述调节机构包括螺杆,所述螺杆与固定座通过轴承转动连接,所述螺杆的表面螺纹连接有螺纹筒,所述螺纹筒的侧边固定连接有连接片,所述连接片的底部与插板固定。
7、进一步的,所述限位滑轨和限位座的表面均开设有等距离开设的插孔,插杆插入至插孔内。
8、与现有技术相比,本实用新型所达到的有益效果是:
9、(1)本实用新型通过设置的限位滑轨、限位座和限位机构之间的相互配合,使得在将机器人主体移动到充电桩支撑板的顶部后,可以有效的对其进行固定限位,从而达到对机器人主体在进行充电的时候,能有效的保证了机器人主体的稳定,避免了机器人主体在发生晃动的时候,影响充电的稳定。
10、(2)本实用新型通过设置的锁紧组件和固定座之间的相互配合,使得在将充电头插入至充电座内的时候,有效的保证了插入的稳定,使得在对需要插入不同深度的充电座处进行充电的时候,都可以有效的保证了充电的稳定。
技术特征:
1.一种机器人充电用稳定机构,其特征在于:包括机器人主体(1),所述机器人主体(1)的底部设置有充电桩支撑板(2),所述充电桩支撑板(2)的顶部固定连接有限位滑轨(3),所述机器人主体(1)的底部固定连接有限位座(4),所述限位座(4)插入至限位滑轨(3)内,所述充电桩支撑板(2)的顶部设置有限位机构(5),所述限位机构(5)包括安装板(51),所述安装板(51)的底部与充电桩支撑板(2)固定,所述安装板(51)的侧边安装有液压缸(52),所述液压缸(52)的端部固定连接有连接板(53),所述连接板(53)的侧边固定连接有插杆(54),所述插杆(54)与限位座(4)和限位滑轨(3)贯穿连接。
2.根据权利要求1所述的一种机器人充电用稳定机构,其特征在于:所述机器人主体(1)的顶部侧边设置有充电座(6),所述充电桩支撑板(2)的顶部相对于充电座(6)的一侧设置有充电头(7),所述充电头(7)插入至充电座(6)内。
3.根据权利要求2所述的一种机器人充电用稳定机构,其特征在于:所述充电头(7)的表面固定连接有固定座(8),所述固定座(8)表面安装有用于对充电座(6)进行锁紧的锁紧组件(9)。
4.根据权利要求3所述的一种机器人充电用稳定机构,其特征在于:所述锁紧组件(9)包括插板(94),所述充电座(6)和固定座(8)的表面均开设有锁紧槽(95),所述插板(94)插入至锁紧槽(95)内,所述锁紧槽(95)通过设置调节机构与固定座(8)连接。
5.根据权利要求4所述的一种机器人充电用稳定机构,其特征在于:所述调节机构包括螺杆(91),所述螺杆(91)与固定座(8)通过轴承转动连接,所述螺杆(91)的表面螺纹连接有螺纹筒(92),所述螺纹筒(92)的侧边固定连接有连接片(93),所述连接片(93)的底部与插板(94)固定。
6.根据权利要求1所述的一种机器人充电用稳定机构,其特征在于:所述限位滑轨(3)和限位座(4)的表面均开设有等距离开设的插孔,插杆(54)插入至插孔内。
技术总结
本技术涉及一种机器人充电用稳定机构,属于稳定机构技术领域。其主要解决由于机器人本身体积较大,容易因为机器人本身的移动,影响充电头和充电座连接的稳定的问题,提出如下技术方案。包括机器人主体,所述机器人主体的底部设置有充电桩支撑板,所述充电桩支撑板的顶部固定连接有限位滑轨,所述机器人主体的底部固定连接有限位座,所述限位座插入至限位滑轨内。本技术通过设置的限位滑轨、限位座和限位机构之间的相互配合,使得在将机器人主体移动到充电桩支撑板的顶部后,可以有效的对其进行固定限位,从而达到对机器人主体在进行充电的时候,能有效的保证了机器人主体的稳定,避免了机器人主体在发生晃动的时候,影响充电的稳定。
技术研发人员:冯烨明,李津炜,赵杰
受保护的技术使用者:烟台凌晟电力科技有限公司
技术研发日:20221212
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!