电池控制电路及机器人的制作方法
本技术是关于电池控制,特别是关于一种电池控制电路及机器人。
背景技术:
1、目前商用配送机器人通用电池包大都采用充放电同口的方案,充电mos管和放电mos管集中串联在电芯与充电口之间,充电mos管常开,放电mos管关闭,而充电检测机制则为充电口电压大于电芯电压0.5v时才会认为有效,然后打开放电mos管对电池包充电,导致机器人关机充电充到93%-98%左右(即电芯电压=充电器输出电压-0.5v),拔掉充电器后再接上充电器时机器人无法充电,只有当电池包消耗一定电量时才会继续充电,使得充电体验较差。
2、公开于该背景技术部分的信息仅仅旨在增加对本实用新型的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本实用新型的目的在于提供一种电池控制电路及机器人,其能够解决商用配送机器人在将近满电时接入充电器也无法继续充电的问题,提升用户充电体验,提高产品可靠性。
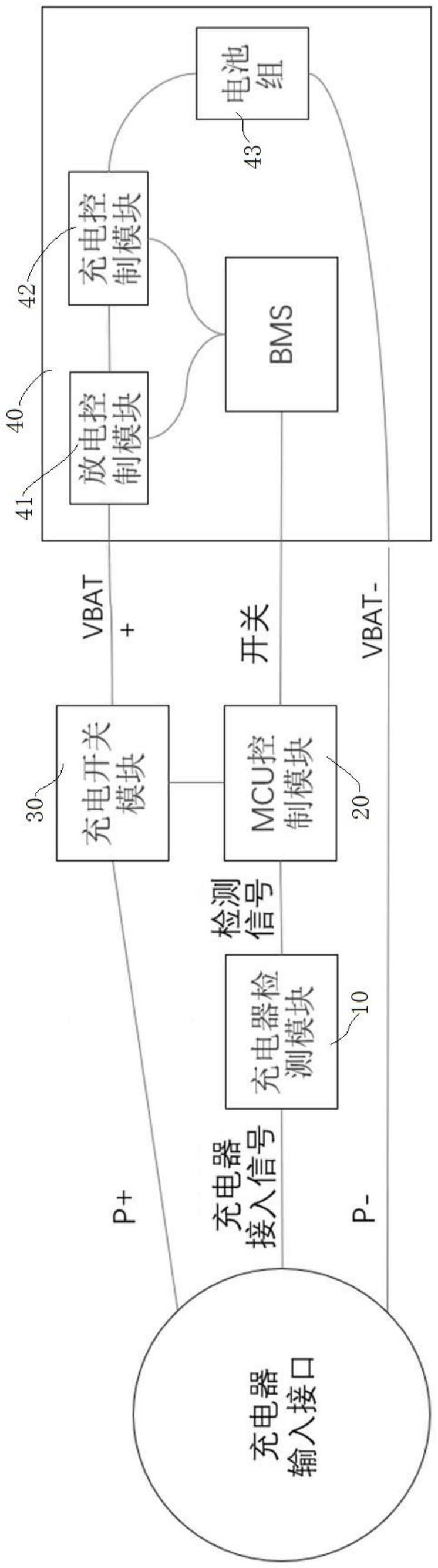
2、为实现上述目的,本实用新型的实施例提供了一种电池控制电路,包括相连的充电器检测模块和mcu控制模块,所述mcu控制模块与电池包相连,所述充电器检测模块用于与充电器相连,所述充电器检测模块用于检测充电器接入信号并在接收到充电器接入信号后输出检测信号,所述mcu控制模块用于接收检测信号并控制打开电池包以使电池包与充电器连通而进行充电。
3、在本实用新型的一个或多个实施例中,所述充电器检测模块包括驱动电路、开关管、偏置电路和输出电路,所述驱动电路与开关管的控制端相连,所述驱动电路用于与充电器相连以接收充电器接入信号并输出至开关管的控制端,所述偏置电路与开关管的第一端相连,所述开关管的第二端与地相连,所述输出电路与开关管的第一端相连以在开关管导通时输出检测信号。
4、在本实用新型的一个或多个实施例中,所述电池包包括电池管理系统、放电控制模块、充电控制模块和电池组,所述放电控制模块和充电控制模块相连且同时串联于电池组的正极端以及充电器的正极输入接口之间,所述电池组的负极端与充电器的负极输入接口相连,所述电池管理系统与mcu控制模块相连,所述电池管理系统用于在电池包被打开时控制打开放电控制模块和充电控制模块以使电池组和充电器连通而进行充电。
5、在本实用新型的一个或多个实施例中,所述电池控制电路还包括充电开关模块,所述充电开关模块与充电器的正极输入接口和电池包的正极端相连,所述充电开关模块受mcu控制模块控制,在打开电池包的同时打开充电开关模块使得充电器的正极输入接口与电池包的正极端连通。
6、在本实用新型的一个或多个实施例中,所述驱动电路包括第一电阻,所述第一电阻的第一端用于接收充电器接入信号,所述第一电阻的第二端与开关管的控制端相连。
7、在本实用新型的一个或多个实施例中,所述驱动电路还包括二极管,所述二极管的阳极用于接收充电器接入信号,所述二极管的阴极与第一电阻的第一端相连。
8、在本实用新型的一个或多个实施例中,所述驱动电路还包括稳压管、第二电阻和第一电容,所述稳压管的阴极与第一电阻的第二端相连,所述第二电阻和第一电容的第一端均与第一电阻的第二端相连,所述第二电阻和第一电容的第二端均与地相连。
9、在本实用新型的一个或多个实施例中,所述偏置电路包括第三电阻,所述第三电阻的第一端与电源电压相连,所述第三电阻的第二端与开关管的第一端相连。
10、在本实用新型的一个或多个实施例中,所述输出电路包括第四电阻和第二电容,所述第四电阻的第一端与开关管的第一端相连,所述第四电阻的第二端与第二电容的第一端相连且用于输出检测信号,所述第二电容的第二端与地相连。
11、本发明还公开了一种机器人,包括所述的电池控制电路。
12、与现有技术相比,根据本实用新型的电池控制电路及机器人,通过充电器检测模块检测充电器接入信号,并在接收到充电器接入信号后输出检测信号,通过mcu控制模块接收检测信号并控制打开电池包以使电池包与充电器连通而进行充电,从而使得只要充电器输出电压大于电池包的电压就可以实现充电,提升用户充电体验,提高产品可靠性。
技术特征:
1.一种电池控制电路,其特征在于,包括相连的充电器检测模块和mcu控制模块,所述mcu控制模块与电池包相连,所述充电器检测模块用于与充电器相连,所述充电器检测模块用于检测充电器接入信号并在接收到充电器接入信号后输出检测信号,所述mcu控制模块用于接收检测信号并控制打开电池包以使电池包与充电器连通而进行充电,所述充电器检测模块包括驱动电路、开关管、偏置电路和输出电路,所述驱动电路与开关管的控制端相连,所述驱动电路用于与充电器相连以接收充电器接入信号并输出至开关管的控制端,所述偏置电路与开关管的第一端相连,所述开关管的第二端与地相连,所述输出电路与开关管的第一端相连以在开关管导通时输出检测信号。
2.如权利要求1所述的电池控制电路,其特征在于,所述电池包包括电池管理系统、放电控制模块、充电控制模块和电池组,所述放电控制模块和充电控制模块相连且同时串联于电池组的正极端以及充电器的正极输入接口之间,所述电池组的负极端与充电器的负极输入接口相连,所述电池管理系统与mcu控制模块相连,所述电池管理系统用于在电池包被打开时控制打开放电控制模块和充电控制模块以使电池组和充电器连通而进行充电。
3.如权利要求1所述的电池控制电路,其特征在于,所述电池控制电路还包括充电开关模块,所述充电开关模块与充电器的正极输入接口和电池包的正极端相连,所述充电开关模块受mcu控制模块控制,在打开电池包的同时打开充电开关模块使得充电器的正极输入接口与电池包的正极端连通。
4.如权利要求1所述的电池控制电路,其特征在于,所述驱动电路包括第一电阻,所述第一电阻的第一端用于接收充电器接入信号,所述第一电阻的第二端与开关管的控制端相连。
5.如权利要求4所述的电池控制电路,其特征在于,所述驱动电路还包括二极管,所述二极管的阳极用于接收充电器接入信号,所述二极管的阴极与第一电阻的第一端相连。
6.如权利要求4所述的电池控制电路,其特征在于,所述驱动电路还包括稳压管、第二电阻和第一电容,所述稳压管的阴极与第一电阻的第二端相连,所述第二电阻和第一电容的第一端均与第一电阻的第二端相连,所述第二电阻和第一电容的第二端均与地相连。
7.如权利要求1所述的电池控制电路,其特征在于,所述偏置电路包括第三电阻,所述第三电阻的第一端与电源电压相连,所述第三电阻的第二端与开关管的第一端相连。
8.如权利要求1所述的电池控制电路,其特征在于,所述输出电路包括第四电阻和第二电容,所述第四电阻的第一端与开关管的第一端相连,所述第四电阻的第二端与第二电容的第一端相连且用于输出检测信号,所述第二电容的第二端与地相连。
9.一种机器人,其特征在于,包括如权利要求1~8任一项所述的电池控制电路。
技术总结
本技术公开了一种电池控制电路及机器人,控制电路包括相连的充电器检测模块和MCU控制模块,MCU控制模块与电池包相连,充电器检测模块用于与充电器相连,充电器检测模块用于检测充电器接入信号并在接收到充电器接入信号后输出检测信号,MCU控制模块用于接收检测信号并控制打开电池包以使电池包与充电器连通而进行充电。本技术的电池控制电路及机器人,通过充电器检测模块检测充电器接入信号,并在接收到充电器接入信号后输出检测信号,通过MCU控制模块接收检测信号并控制打开电池包以使电池包与充电器连通而进行充电,从而使得只要充电器输出电压大于电池包的电压就可以实现充电,提升用户充电体验,提高产品可靠性。
技术研发人员:孙厚陆,包裕隆
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:20221209
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!