一种适用于配网带电作业机器人使用的电动夹线器的制作方法
本技术属于带电作业机器人,具体涉及一种适用于配网带电作业机器人使用的电动夹线器。
背景技术:
1、在10kv带电作业的各种搭接场景里都需要利用工具对支线进行夹持、捋线、线夹搭接,目前在机器人作业领域,夹线器多为纯机械式结构,在进行粗支线的捋线过程中由于为滑动接触而导致机械臂容易过载保护。
2、cn113410718a中提到的适用于带电作业机器人使用的夹线器开口部分全部为滚柱,虽然在捋线过程中采用滚动接触可减小接触阻力,但在最后搭接步骤夹线时通过连杆机构进行夹线,夹紧力小无法夹住,同时二根导柱和中间导柱夹线会使支线被夹弯、很难进行线夹安装工作,另外现有的夹线器在捋线到停止位置时无法保证留出搭接支线的长度,只能通过机器人的机械臂来调整,很难调整到理想搭接长度同时也得花费大量时间。
技术实现思路
1、发明目的:针对上述现有技术,提出一种适用于配网带电作业机器人使用的电动夹线器;
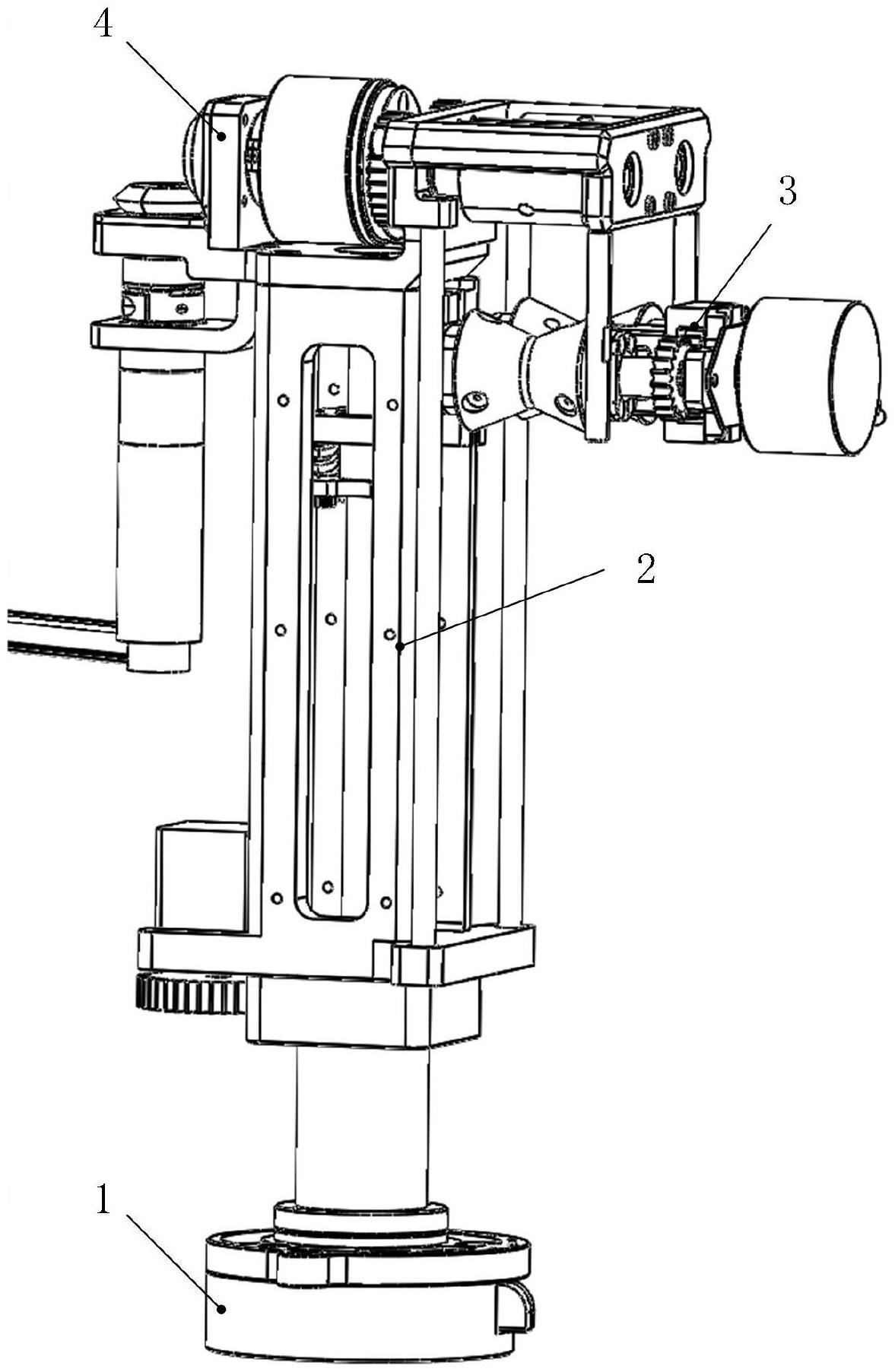
2、技术方案:一种适用于配网带电作业机器人使用的电动夹线器,包括对接组件、升降组件、主从轮组件、驱动组件;其中:
3、所述对接组件包括导正定位盘、上锁杆、弹簧、工具盘、多个斜面块、传递销、升降丝杆;所述工具盘螺钉连接于所述导正定位盘,所述工具盘的一侧通过圆柱销转动连接有所述上锁杆,所述弹簧的一端设于所述工具盘内,另一端连接于所述上锁杆,多个所述斜面块设于所述工具盘内且滑动连接有滚轮,所述滚轮的一侧设有定位柱,所述定位柱连接在机器人上,所述定位柱卡和连接于所述上锁杆,所述工具盘和所述导正定位盘的中部转动连接所述升降丝杆,所述升降丝杆的一端固定连接所述传递销,所述传递销驱动连接于所述机器人;
4、所述升降组件包括直齿轮一、直齿轮二、绝对值编码器、两个升降导杆、两个滚动轴、升降螺母、轴肩螺钉、矩簧、滑动衬套、升降机架;所述升降机架连接于所述导正定位盘的上方,所述升降丝杆设于所述升降机架的内部,所述直齿轮一通过平键固定在所述升降丝杆上,所述直齿轮一的一侧咬合连接直齿轮二,所述直齿轮二通过顶丝安装在所述绝对值编码器的输出轴上,所述升降螺母转动连接于所述升降丝杆,所述升降螺母的上方通过所述轴肩螺钉连接有多个所述矩簧;
5、所述主从轮组件包括从动轮架、两个从动轮、两个从动轮轴、编码器连接架、连接架二、直齿轮三、编码器轴、连接架三、直齿轮四、增量式编码器、主动轮架、主动轮、限位轴;多个所述矩簧的另一端固定连接于从动轮架上,所述从动轮架的两侧通过所述滑动衬套滑动连接于两个所述升降导杆,两个所述升降导杆固定连接于所述升降机架的内部两侧,两个所述从动轮轴均对称转动连接在所述从动轮架上,两个所述从动轮轴上均通过平键连接有所述从动轮,两个所述从动轮轴之间、所述从动轮架上依次固定连接有所述编码器连接架、所述连接架二和所述连接架三,所述连接架三的右侧设有所述增量式编码器,所述增量式编码器上设有编码器轴,所述编码器轴的一端贯穿所述连接架三且连接有所述直齿轮三,所述从动轮轴末端转动连接有两个所述直齿轮四,两个所述直齿轮四均咬合连接所述直齿轮三,所述主动轮架安装在驱动机架上,所述主动轮架上对称转动连接有主轴,所述主轴上固定连接有所述主动轮,所述限位轴连接于所述主动轮架最外侧;
6、所述驱动组件包括驱动机架、离合器连接轴、直齿轮五、两个直齿轮六、电磁离合器、离合器输入轴、换向锥齿轮、联轴器输出轴、联轴器、电机连接架、直流电机;所述直流电机连接于所述电机连接架上,所述电机连接架固定在所述驱动机架上,所述驱动机架设于所述升降机架的顶部,所述直流电机的输出端连接有所述联轴器输出轴,所述联轴器输出轴设于所述联轴器内,所述联轴器输出轴末端固定连接有齿轮,所述齿轮咬合连接所述换向锥齿轮,所述换向锥齿轮固定连接有所述离合器输入轴,所述离合器输入轴通过顶丝与所述电磁离合器连接,所述离合器输入轴的末端固定连接有所述离合器连接轴,所述离合器连接轴上固定连接有所述直齿轮五,所述直齿轮五的两侧咬合连接所述直齿轮六,两个所述直齿轮六上均固定连接于所述主动轮,所述升降丝杆的一端贯穿所述升降机架连接于所述传递销,另一端轴承连接于所述驱动机架的底部。
7、优选的,所述从动轮轮的材料为聚氨酯。
8、优选的,所述升降机架的一侧、所述导正定位盘上还对称转动连接滚动轴。
9、有益效果:本实用新型通过主-从轮结构,辅以夹持机构可实现纯滚动接触捋线,同时四轮对夹也可保证在夹紧支线时支线的相对水平姿态。
10、在最后搭接步骤中通过主动轮充当摩擦轮正反转的方式可实现方便调整搭接支线预留长度,另外配合多个编码器的信号反馈极大的提升了作业的效率。
技术特征:
1.一种适用于配网带电作业机器人使用的电动夹线器,其特征在于,包括对接组件(1)、升降组件(2)、主从轮组件(3)、驱动组件(4);其中:
2.如权利要求1所述的一种适用于配网带电作业机器人使用的电动夹线器,其特征在于,所述从动轮(302)的材料为聚氨酯。
3.如权利要求1所述的一种适用于配网带电作业机器人使用的电动夹线器,其特征在于,所述升降机架(210)的一侧、所述导正定位盘(101)上还对称转动连接滚动轴(205)。
技术总结
本技术提供一种适用于配网带电作业机器人使用的电动夹线器,包括对接组件、升降组件、主从轮组件、驱动组件;所述对接组件将机器人和电动夹线器进行连接,所述升降组件包括升降螺母,通过升降螺母带动主从轮组件上下移动,对电缆线进行夹紧,通过驱动组件带动电缆线进行移动;本技术通过主‑从轮结构,辅以夹持机构可实现纯滚动接触捋线,同时四轮对夹也可保证在夹紧支线时支线的相对水平姿态。在最后搭接步骤中通过主动轮充当摩擦轮正反转的方式可实现方便调整搭接支线预留长度,另外配合多个编码器的信号反馈极大的提升了作业的效率。
技术研发人员:黄良玉,蔡海晨,黄志康,刘久晨,桑文浩
受保护的技术使用者:亿嘉和科技股份有限公司
技术研发日:20221230
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!