旋转电机以及旋转电机的控制方法与流程
本发明涉及旋转电机以及旋转电机的控制方法。
背景技术:
1、以往,提出像专利文献1那样利用无齿、无槽的定子铁芯的旋转电机。在无齿、无槽的旋转电机中,能够抑制齿槽转矩、转矩脉动。
2、专利文献1:日本特开2019-24295号公报
3、然而,在像专利文献1那样利用无齿的定子铁芯的情况下,磁铁磁通不会通过齿,因此来自磁铁的磁通波形根据与磁铁相距的距离而变化。若尽管在径向内外来自磁铁的磁通波形大幅不同,但在径向内外仍使流过线圈的电流波形一致,则很难使转矩波形成为理想的正弦波形状。因此,振动、噪声有可能变大。
技术实现思路
1、本发明是鉴于上述情况而完成的,主要目的在于提供能够抑制振动、噪声的旋转电机以及旋转电机的控制方法。
2、用于解决上述课题的第一方案提供一种旋转电机,具备:励磁元件,具有多个磁极;以及无齿构造的电枢,具有电枢绕组以及支承部件,上述电枢绕组包含多个部分绕组,上述支承部件设置在上述电枢绕组的径向内侧以及径向外侧中的与上述励磁元件相反侧并且支承上述多个部分绕组,上述励磁元件以及上述电枢中的任一方为转子,其中,在上述旋转电机中,上述电枢绕组具有电独立的2个系统的绕组,在径向上,第一系统的电枢绕组配置在比第二系统的电枢绕组更靠近上述励磁元件侧,具备电流控制装置,该电流控制装置控制向上述第一系统的电枢绕组以及上述第二系统的电枢绕组的电流,上述电流控制装置考虑基于径向上的到上述励磁元件为止的距离的差异的、来自上述励磁元件的磁通波形的差异,来使向上述第一系统的电枢绕组的电流波形与向上述第二系统的电枢绕组的电流波形不同。
3、电流控制装置考虑基于径向上的到励磁元件为止的距离的差异的、来自励磁元件的磁通波形的差异,来使向第一系统的电枢绕组的电流波形与向第二系统的上述电枢绕组的电流波形不同。因此,能够在径向内外使转矩波形接近正弦波形状。因此,能够使旋转电机以低振动、低噪声驱动。
4、在第二方案中,根据第一方案,上述电流控制装置对应于通过上述第一系统的电枢绕组的磁通波形与通过上述第二系统的电枢绕组的磁通波形相比峰值变大的情况,减小向上述第一系统的电枢绕组的电流波形中的峰值。
5、由此,能够抑制转矩波形的峰值突出,抑制转矩脉动。
6、在第三方案中,根据第一或者第二方案,上述电枢绕组由三相的相绕组构成,构成上述第一系统的电枢绕组的各相的相绕组在周向上与同相的且构成上述第二系统的电枢绕组的相绕组分别配置在相同的位置。
7、由此,能够容易地进行制造。
8、在第四方案中,根据第一或者第二方案,上述电枢绕组由六相的相绕组构成,构成上述第一系统的电枢绕组的各相绕组相对于构成上述第二系统的电枢绕组的各相绕组在周向上分别错开地配置,以使得分别在电角度上相差一个规定角度。
9、由此,与由三相构成的情况相比,能够抑制产生转矩脉动。
10、在第五方案中,根据第一至第三方案中的任一方案,在上述旋转电机的动作点为高旋转区域的情况下,上述电流控制装置使电流仅流过上述第二系统的电枢绕组。
11、由此,在高旋转区域中,切换绕组,使电流仅流过第二系统的电枢绕组,由此能够减少匝数,使其高速旋转。此时,通过使电流流过与励磁元件分开距离的第二系统的电枢绕组,能够有效地抑制感应电压。另外,与第一系统的电枢绕组相比,磁通波形平缓地变化,因此能够容易抑制转矩脉动。此外,在低旋转区域中,切换绕组,使电流流过第一系统和第二系统的电枢绕组,由此能够增加匝数,实现高转矩的输出。
12、第六方案提供一种旋转电机的控制方法,由旋转电机的控制装置实施,上述旋转电机具备:励磁元件,具有多个磁极;以及无齿构造的电枢,具有电枢绕组以及支承部件,上述电枢绕组包含多个部分绕组,上述支承部件设置在上述电枢绕组的径向内侧以及径向外侧中的与上述励磁元件相反侧并且支承上述多个部分绕组,上述励磁元件以及上述电枢中的任一方为转子,上述电枢绕组具有电独立的2个系统的绕组,在径向上,第一系统的电枢绕组配置在比第二系统的电枢绕组更靠近上述励磁元件侧,上述控制装置具有控制向上述第一系统的电枢绕组以及上述第二系统的电枢绕组的电流的电流控制功能,考虑基于径向上的到上述励磁元件为止的距离的差异的、来自上述励磁元件的磁通波形的差异,来使向上述第一系统的电枢绕组的电流波形与向上述第二系统的电枢绕组的电流波形不同。
13、由此,能够得到与第一方案相同的效果。
技术特征:
1.一种旋转电机,具备:
2.根据权利要求1所述的旋转电机,其中,
3.根据权利要求1或2所述的旋转电机,其中,
4.根据权利要求1或2所述的旋转电机,其中,
5.根据权利要求1至3中任一项所述的旋转电机,其中,
6.一种旋转电机的控制方法,由旋转电机(10)的控制装置(270)实施,所述旋转电机(10)具备:
技术总结
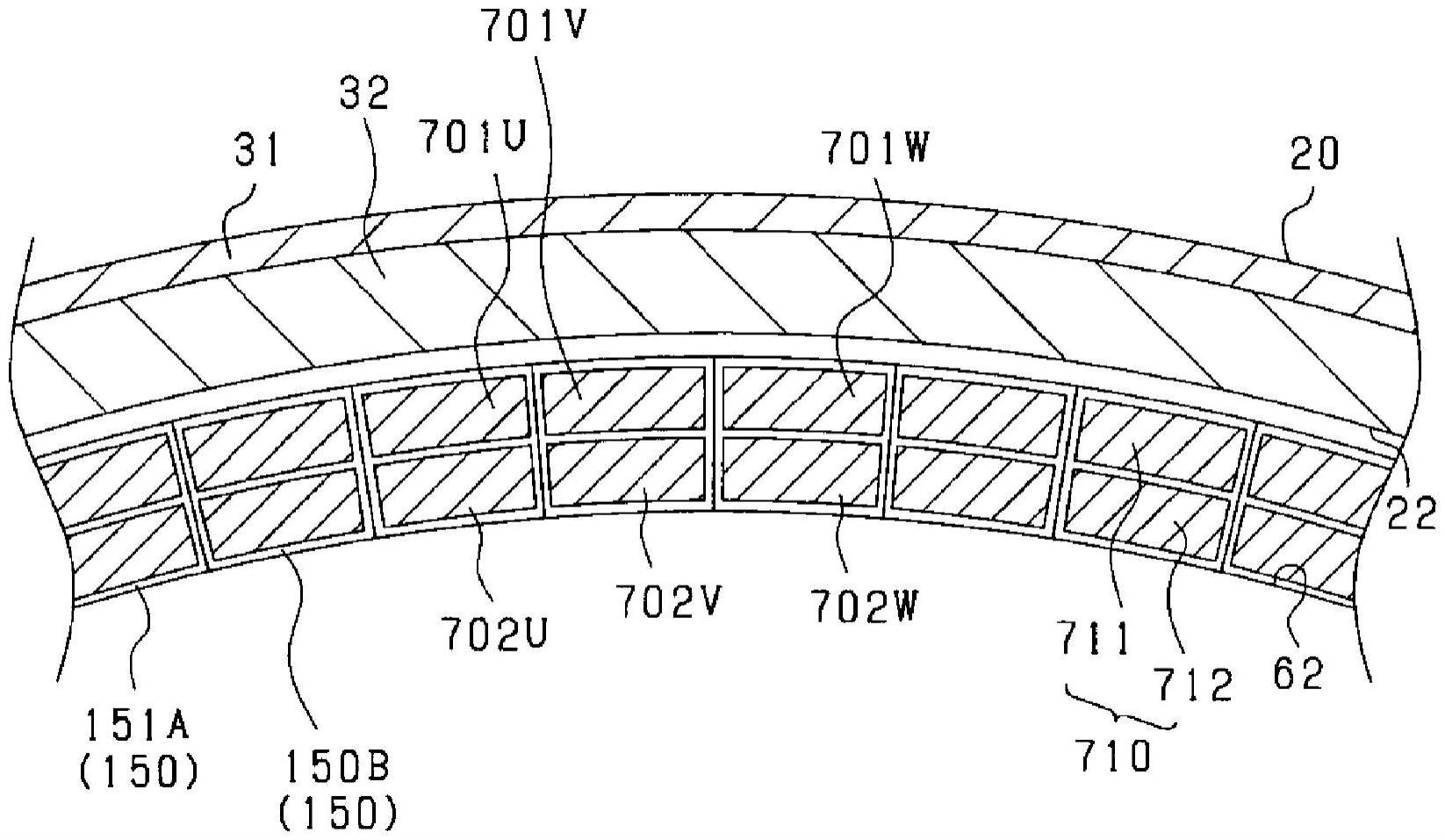
旋转电机的电枢绕组(700)具有电独立的2个系统的绕组,在径向上,第一系统的电枢绕组(701)配置在比第二系统的电枢绕组(702)更靠近上述励磁元件侧,具备控制向上述第一系统的电枢绕组以及上述第二系统的电枢绕组的电流的电流控制装置(270)。上述电流控制装置考虑基于径向上的到上述励磁元件为止的距离的差异的、来自上述励磁元件的磁通波形的差异,来使向上述第一系统的电枢绕组的电流波形与向上述第二系统的电枢绕组的电流波形不同。
技术研发人员:松田匡史,高桥裕树
受保护的技术使用者:株式会社电装
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!