用于起动爪极马达的转子的方法与流程
本发明涉及一种根据权利要求1的主题的用于起动单相的爪极马达的转子的方法。
背景技术:
1、泵例如可以被用在机动车辆中以用于输送和运输液体,如冷却液。通常,这种泵借助与泵的转子作用连接的电驱动装置来运行。在此可以使用单相的爪极马达作为电驱动装置,其具有永久励磁的转子和电子换向的定子。霍尔传感器用于确定相对的转子位置,相对的转子位置对于定子绕组中的电流换向是必要的,以此可以造成转子的转动运动。
2、例如,由于风车效应(windmilling-effekt)可能发生不利地处于转子的止动定位,从而使得该转子在起动情况下在第一次换向时可能难以克服反作用力矩。在此存在泵错误起动的风险,这意味着,转子的起动和运动逆着额定运行时的运转方向地发生。由于止动力矩过小或由于大的摩擦,也存在泵错误起动的风险。
技术实现思路
1、本发明的任务是防止泵转子的错误起动,尤其是在单相的爪极马达的情况下。该任务通过权利要求1的方法来解决。
2、根据权利要求1的按照本发明的方法被设置成用于起动单相的爪极马达的转子,其中,爪极马达包括在额定运行时实施沿运转方向运动的永久励磁的转子、电子换向的定子和用于确定相对的转子位置的霍尔传感器。该方法包含以下步骤:
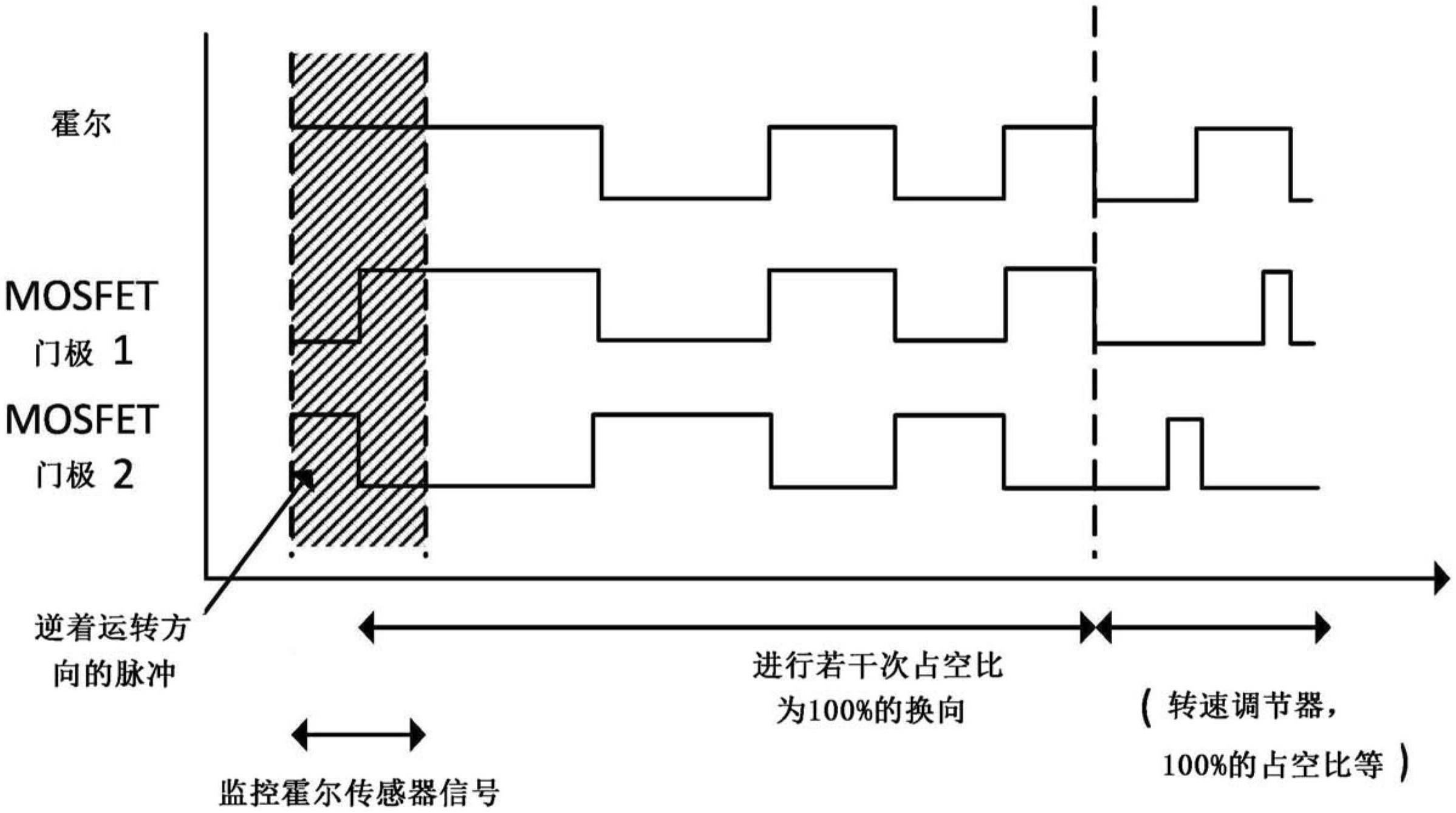
3、a.基于取反的霍尔传感器信号通过对定子绕组通电来产生脉冲以用于使转子逆着运转方向运动;并且
4、b.基于霍尔传感器信号通过对定子绕组通电来起动转子使其沿运转方向运动。
5、泵的转子当其未被通电时由于止动可能被锁定在任意数量、优选是8个位置上。泵电子器件在考虑被安装在定子上的霍尔传感器的信号的情况下起动泵。起动前的转子定位由止动力矩(由磁回路限定)、摩擦和外部力矩(例如由于液压回路溢流造成)限定。在从静止位置(止动位置)起动时,泵转子必须在第一次换向时沿转动方向克服短暂的马达反作用力矩,即必须产生足够的旋转能量。如果未成功,则发生方向反转,并因此可能发生转子的错误起动。此外,换向时间点会发生移位(例如由于磁体的磁化和霍尔传感器的定位所造成),并且导致同样的问题。借助与运转方向相反的短脉冲,转子获得更多的时间和(起动)行程,以获取足够的推动力并因此克服反作用力矩。
6、优选可以设置的是,如果在以预定的时长产生用于使转子逆着运转方向运动的脉冲期间或之后立即中断起动,并重新以预定的时长来实现用于使转子逆着运转方向运动的脉冲。
7、为了防止错误换向而有可能的是,在产生用于使转子逆着运转方向运动的脉冲期间和在其之后不久就对霍尔传感器信号进行监控。如果在监控时间期间确认霍尔传感器信号发生变化,则停止起动,并在短时间(例如150毫秒)后重复产生之前所描述的脉冲。
8、转子磁场和定子杂散场在霍尔传感器定位处重叠。如果转子在起动前偏离额定的定位以至于霍尔传感器处的转子磁场非常弱,则定子杂散场就可能会以不允许的方式干扰转子磁场,从而在产生脉冲期间使霍尔传感器信号立即取反,这导致错误换向。
9、在优选的实施方案中,在超过这种产生脉冲的有限的重复次数(例如三次尝试)时,转子将在不产生脉冲的情况下被起动。例如,在克服了泵堵塞的情况下(其中,在不产生用于使转子逆着运转方向运动的脉冲的情况下进行起动),这可能是有意义的。
10、在另外的实施方式中,依赖于单相的爪极马达的供电电压来获知或确定预定的时长。存在如下可能性,即,至少一个脉冲的产生关于预定的时长方面依赖于单相的爪极马达的供电电压而改变。这有利地使绕组中的能量输入与依赖于供电电压地防止或减少错误起动的有效效果去关联。时长的相应预定的值可以被计算出或通过实验获知。(示例性的值:在<=11v的供电电压时为1.5毫秒;在11v<v<=13.5v的供电电压时为1.1毫秒;在>13.5v的供电电压时为0.8毫秒)。
11、此外优选地,对定子绕组的通电通过由功率电子器件进行的换向来实现。这些构件在现有技术中通常使用诸如mosfet或igbt的结构元件。
12、在一个实施方式中,预定的时长被如下地选择,即,通过转子逆着运转方向的运动,使得该转子在随后的起动中经历的加速多于经历的制动,以便克服在第一换向时间点时的反作用力矩,从而确保沿运转方向的运动。因此,优选防止了错误起动。为了确保正确的起动定位,可以使用至少一个脉冲。
13、在本发明的意义中,脉冲是在实际起动之前逆着运转方向的短暂的相换向,即基于取反的霍尔传感器信号对定子绕组的通电。换句话说,通过用于使转子逆着运转方向运动的脉冲确保了转子在随后的起动时沿正确的转动方向获得足够的“推动力”以克服在第一次换向时的反作用力矩。
14、根据一个构造方案,霍尔传感器被安装在定子上或电子器件电路板上并且在转动方向上关于定子极的中间定位错开地布置。由此确保了转子沿正确的转动方向的起动。
15、优选地,单相的爪极马达被用于电动泵,尤其是电动离心泵。然而,也能想到被用于其他的电动液体泵。
技术特征:
1.用于起动单相的爪极马达的转子的方法,其中,所述爪极马达包括在额定运行时沿运转方向运动的永久励磁的转子、电子换向的定子和用于确定相对的转子位置的霍尔传感器,其中,所述方法包括以下步骤:
2.根据权利要求1所述的方法,其中,如果在以预定的时长产生用于使所述转子逆着运转方向运动的脉冲期间或之后立即中断起动,并重新以预定的时长来实现用于使所述转子逆着运转方向运动的脉冲。
3.根据权利要求1或2所述的方法,其中,在超过了这种产生脉冲的有限的重复次数时,在不产生的脉冲的情况下起动所述转子使其沿运转方向运动。
4.根据前述权利要求中任一项所述的方法,其中,依赖于所述单相的爪极马达的供电电压来获知或确定所述预定的时长。
5.根据前述权利要求中任一项所述的方法,其中,对定子绕组的通电通过由功率电子器件进行的换向来实现。
6.根据前述权利要求中任一项所述的方法,其中,所述预定的时长被如下这样地选择,即,通过所述转子逆着运转方向的运动,使得所述转子在随后的起动中经历的加速多于经历的制动,以便克服在第一换向时间点处的反作用力矩,从而确保沿运转方向的运动。
7.根据前述权利要求中任一项所述的方法,其中,所述霍尔传感器被安装在定子上或电子器件电路板上并且在转动方向上关于定子极的中间定位错开地布置。
8.根据前述权利要求中任一项所述的方法,其中,所述单相的爪极马达被用于电动泵,尤其是电动离心泵。
技术总结
本发明涉及一种用于起动单相的爪极马达的转子的方法,其中,爪极马达包括在额定运行时实施沿运转方向运动的永久励磁的转子、电子换向的定子和用于确定相对的转子位置的霍尔传感器,其中,方法包括以下步骤:a.基于取反的霍尔传感器信号通过对定子绕组通电来产生脉冲以用于使转子逆着运转方向运动;并且b.基于霍尔传感器信号通过对定子绕组通电来起动转子使其沿运转方向运动。
技术研发人员:伊戈尔·佩佩尔亚耶夫,泽伦·雷贝尔,托比亚斯·罗特,托马斯·彼得赖因斯
受保护的技术使用者:标立电机有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!