旋转电机的控制的制作方法
本发明涉及旋转电机的控制领域。
背景技术:
1、电机可用于所有工业领域。例如,一些具有高转矩、低惯性和快速响应的电机有利地用于致动器的机动化,特别是在飞行器的机载系统中。
2、通常来说,例如电动机的电机配备有控制或操纵设备,用于根据反馈的电数据,特别是关于转子的角位置θ的精确数据来调节其端子处的电压。这些信息通常来源于旋转变压器或位置传感器,该旋转变压器或位置传感器通常安装在电机的轴上,用于测量转子的机械角θmeca(单位为弧度(rad)),也称为机械位置。
3、由旋转变压器测量的机械位置形成用于操纵电机的主要输入数据。实际上,由此导出的电位置θelec用于执行与电机的操纵相关联的参考系变换(例如,派克变换和逆派克变换)。
4、此外,关于机械位置的该信息用于估计机械旋转速度并在控制水平上执行参考系变化。通常,通过测量转子的机械位置,使用导数来估计机械速度。从机械速度推导出的电速度ωelec可以在机器的控制水平上使用,以确保旋转同步参考系(d,q)中的轴线d和q之间的解耦合。
5、尽管如此,由旋转变压器生成的位置信号是不干净的,因为其包含谐波,这些谐波可能具有电机轴上的振动原点,并且可能与从旋转变压器到数字转换器(resolver-to-digital converter,rdc)转换器导出的信号叠加。
6、此外,基于机械位置θ的导数的计算对机械速度的传统计算包含相同的谐波。任何与位置和速度这两个量叠加的谐波都可能在轴上生成扭矩振动,并在电机中生成额外的铁损耗和铜损耗。
7、最先进的解决方案包括使用数字低通滤波器来衰减速度和位置这两个信号的谐波含量。然而,关于速度的信息可能会衰减,因为所考虑的谐波通常具有低频特性。事实上,为了有效性,为低通滤波器选择的截止频率应该接近零频率下的连续信号。此外,由于数字低通滤波器的相移生成的延迟,关于角度的信息可能延迟。这些后果都可能危及电机控制的稳定性和可行性。
8、因此,本发明的目的是提出一种用于确定控制参数(位置和速度)的方法和系统,克服上述缺点,允许在没有谐波和相对于机械位置没有相移的情况下高精度地确定电位置,从而能够以高稳定性和高可靠性操纵电机。
技术实现思路
1、本发明涉及一种用于确定旋转电机的控制参数的方法,该方法包括以下步骤:
2、-测量旋转机的转子的轴线的机械位置θmeca,
3、-基于所述机械位置的测量值构建两个虚两相信号xα,xβ,
4、-使用所述虚两相信号确定电速度的开环估计,即所谓的开环估计电速度
5、-将所述两个虚两相信号xα,xβ和所述开环估计电速度注入锁相环,以及
6、-通过所述锁相环生成该旋转机的实际电位置θ。
7、该方法允许以高精度、无谐波且相对于旋转机的转子的轴线的测量位置无相移地确定电角位置。
8、机械位置θmeca可以通过安装在电机轴上的位置传感器来测量。
9、有利地,构建所述两个虚两相信号包括以下步骤:
10、-通过将该机械位置θmeca乘以电机的极对数p来计算电位置的估计,即所谓的估计电位置θelec,以及
11、-根据所述估计电位置θelec计算两个经归一化并且彼此偏移90°的正弦信号,从而形成所述两个虚两相信号。
12、有利地,估计电速度ωestflt的确定包括以下步骤:
13、-在所述虚两相信号xα,xβ的过零点处生成两个脉冲信号,
14、-根据所述两个脉冲信号之和以及与最大旋转速度相关联的最大有用电频率,确定电速度的初步估计,即所谓的初步电速度ωest,以及
15、-通过对所述初步电速度ωest应用选择性带通滤波器来确定开环估计电速度ωestflt。
16、有利地,所述两个脉冲信号的确定包括以下步骤:
17、-将两个正弦虚两相信号变换为具有预定宽度的方波信号,以及
18、-通过检测所述方波信号的上升沿和下降沿的变化来生成所述两个脉冲信号。
19、有利地,通过所述锁相环生成该旋转机的实际电位置θ包括以下步骤:
20、-对该虚两相信号xα,xβ应用旋转矩阵以沿着旋转同步参考系的轴线d提取虚信号的连续分量xd,
21、-在零设定点伺服控制连续分量xd,
22、-基于所述设定点和所述连续分量之间的偏差来确定校正器y,
23、-通过将所述校正器y与开环估计的电速度ωestflt相加来确定锁相电速度ωpll的估计,
24、-通过积分所述锁相电速度ωpll来确定初步角位置的估计θv,以及
25、-通过补偿该电机的轴的该初步角位置的估计θv中的延迟来确定该电机的实际电位置。
26、有利地,根据第一实施例,该方法包括:通过对该锁相电速度ωpll应用低通有源滤波来确定该电机的实际电速度ω。
27、有利地,根据第二实施例,该方法包括:通过根据该旋转同步参考系的该轴线d对该虚信号的该连续分量xd应用选择性带通有源滤波来确定该电机的实际电速度ω,然后实际电速度ω对应于锁相电速度ωpll。
28、有利地,根据第三实施例,该方法包括:通过对该电机的该实际电位置应用速度观测器来确定该电机的实际电速度ω,随后该实际电速度ω对应于由所述速度观测器获得的滤波电速度的图像。
29、本发明还涉及一种用于控制旋转机的方法,该方法包括根据前述方面确定控制参数。
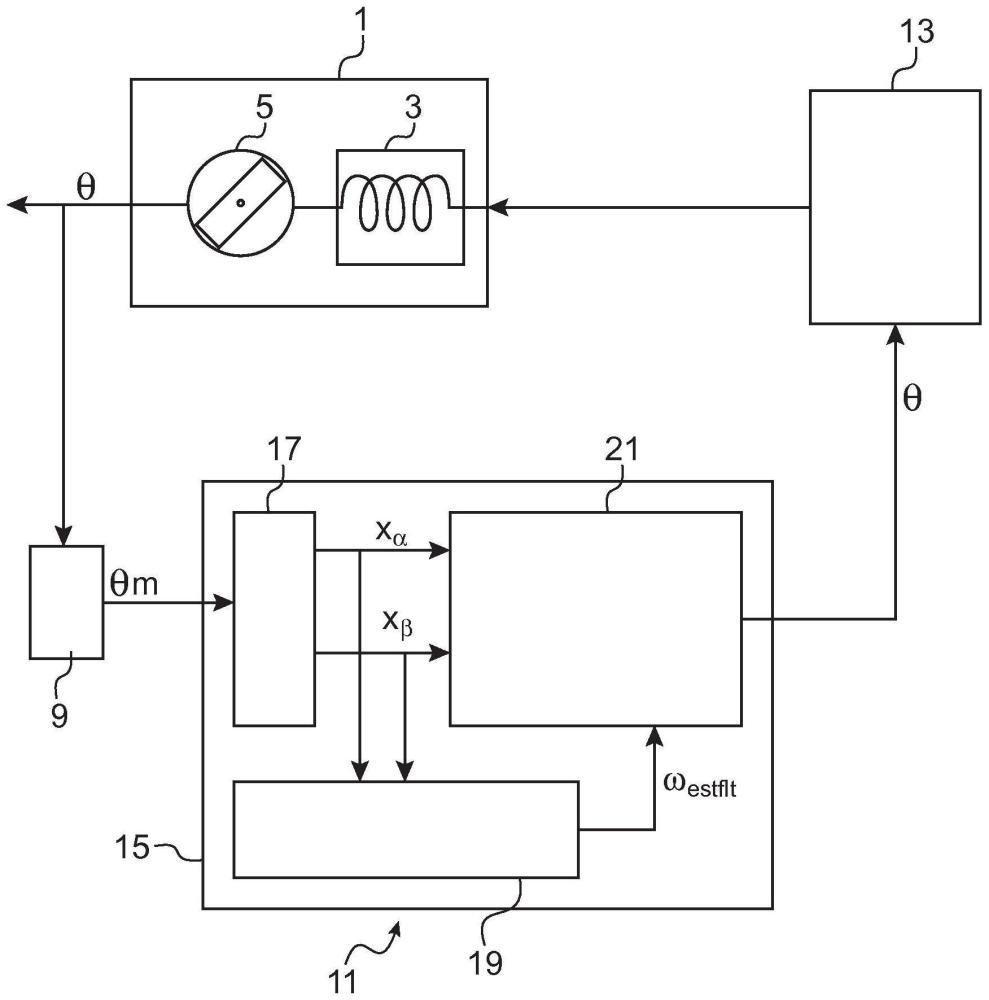
30、本发明还涉及一种用于确定旋转电机的控制参数的系统,包括:
31、-两相虚参考系模块,其被配置为基于从位置传感器接收到的旋转机的转子的轴线的机械位置θmeca的测量值来构建两个虚两相信号(xα,xβ),
32、-开环模块,其被配置为使用所述虚两相信号确定电速度的开环估计,即所谓的开环估计电速度
33、-锁相环模块,其被配置为基于所述两个虚两相信号(xα,xβ)并使用从该开环模块接收的所述开环估计电速度来生成该旋转机的实际电位置θ。
34、本发明还涉及一种用于操纵旋转电机的设备,该设备包括根据上述特征所述的用于确定电参数的系统。
35、本发明还涉及一种旋转电机,该旋转电机包括根据上述特征所述的操纵设备。
技术特征:
1.一种用于确定旋转电机的控制参数的方法,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,通过安装在所述电机(1)的轴上的位置传感器(9)进行对机械位置θmeca的测量。
3.根据权利要求1或2所述的方法,其特征在于,构建所述两个虚两相信号包括以下步骤:
4.根据前述权利要求中任一项所述的方法,其特征在于,所述两个脉冲信号的确定包括以下步骤:
5.根据权利要求1至4中任一项所述的方法,其特征在于,通过所述锁相环生成所述电机(1)的实际电位置θ包括以下步骤:
6.根据权利要求5所述的方法,其特征在于,所述方法包括:通过对所述锁相电速度ωpll应用低通有源滤波(217)来确定所述电机(1)的实际电速度ω。
7.根据权利要求5所述的方法,其特征在于,所述方法包括:通过根据所述旋转同步参考系的所述轴线d对所述虚信号的所述连续分量xd应用选择性带通有源滤波(317)来确定所述电机(1)的实际电速度ω,实际电速度ω对应于锁相电速度ωpll。
8.根据权利要求5所述的方法,其特征在于,所述方法包括:通过对所述电机的所述实际电位置应用速度观测器(417)来确定所述电机的实际电速度ω,所述实际电速度ω对应于由所述速度观测器获得的滤波电速度的图像。
9.一种用于控制旋转电机的方法,包括:根据前述权利要求中任一项确定控制参数。
10.一种用于确定旋转电机的控制参数的系统,包括:
11.一种用于控制旋转电机的设备,包括根据权利要求10所述的用于确定电参数的系统(11)。
12.一种旋转电机,包括根据权利要求11所述的控制设备(13)。
技术总结
本发明涉及一种用于确定旋转电机的控制参数的方法和系统,包括:‑两相虚参考模块(17),其被配置为基于从位置传感器接收到的旋转机的转子的轴的机械位置θ<subgt;meca</subgt;的测量值来构建两个虚两相信号(x_α,x_β);‑开环模块(19),其被配置为使用该虚两相信号确定电速度的开环估计,电速度的开环估计称为电速度开环估计ω_estflt;‑锁相环模块(21),其被配置为基于该两个虚两相信号(x_α,x_β)并使用从该开环模块接收的该电速度开环估计ω_estflt来生成该旋转机的实际电位置θ。
技术研发人员:克里斯特尔·萨伯,纳吉布·鲁哈纳
受保护的技术使用者:赛峰电气与电源公司
技术研发日:
技术公布日:2024/6/11
- 还没有人留言评论。精彩留言会获得点赞!