一种巷道全自动测风控制系统及其控制方法与流程
本发明涉及智能通风系统的,尤其是一种巷道全自动测风控制系统及其控制方法。
背景技术:
1、随着煤矿采掘智能化的发展,通风系统的智能化突显了其重要性,井下巷道的风量一定程度上体现了开采过程中的安全系数,因此井下巷道的风量测定尤为重要。目前我国矿井小型巷道以人工测量为主,大断面巷道则采用自动化装置进行测风。
2、传统人工测量线路法需要测风员沿着固定路线匀速移动风表,直至走完整条路线,方能获得较为准确的巷道平均风速;这种方法对测风员的要求比较高,实际测风时,由于测风员手持风表移动的速度、风表移动的路线在多次测量时难以保持一致,且风表进风截面与风向也不易保证完全垂直,因而容易导致测风准确性不高的问题。此外,人工测风需要测风员到达井下各个指定测风点进行测量,效率较低,且工作强度大。
3、行业内相关自动化产品为多点移动测风装置和六线式测风装置。多点移动测风装置有两种结构形式,能分别适应矩形和拱形断面巷道的风速测量,但由于只测9个点求平均风速,测风准确性欠佳(断面在10m2以上时测24点,断面在10m2以下时测12点,才能获得较为准确的结果);六线式测风装置采用六线式线路法,测量线路上360个点风速后计算平均风速,测量结果准确性较高,但受制于装置结构,风速测量仪器在六线式的竖直路线上只能等高度移动,对拱形断面的适应性不好,并且其风速测量仪器采用线缆供电,对风速测量。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。
2、为此,本发明提出一种巷道全自动测风控制系统及其控制方法,具有自动化程度高、测量准确性高、结构更为优化、无需使用电缆、适用性更强的优点。
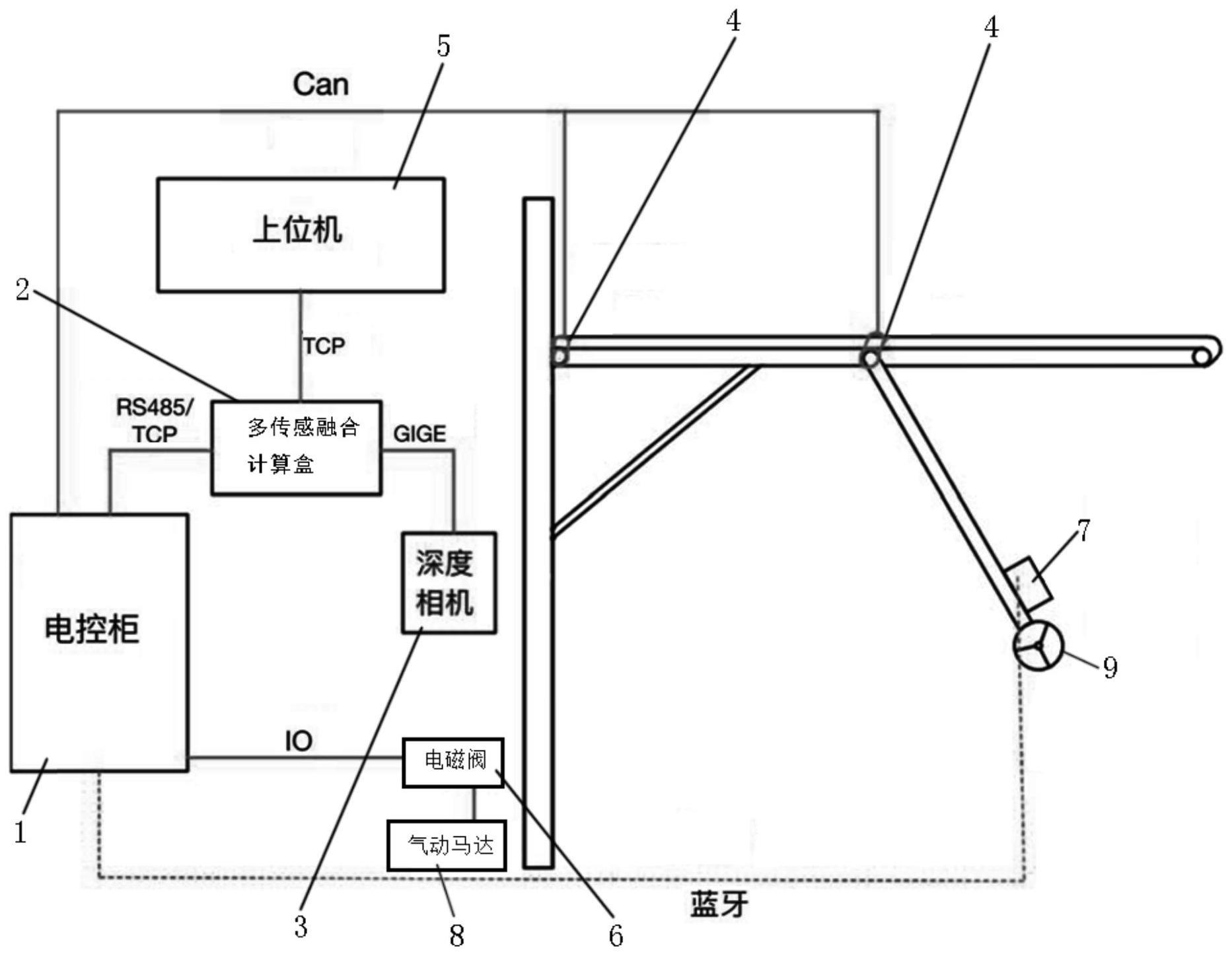
3、根据本发明实施例的巷道全自动测风控制系统,包括电控柜、多传感融合计算盒、深度相机、伺服驱动一体化电机、上位机、电磁阀、远程控制模块和气动马达;所述伺服驱动一体化电机通过can总线接入电控柜中的运动控制器;所述深度相机由千兆以太网通信协议gige接入所述多传感融合计算盒;所述多传感融合计算盒中的边缘计算模块将获取图像通过传输控制协议tcp传给上位机;所述多传感融合计算盒将图像识别的数据信息通过传输控制协议tcp或通信接口rs485传给电控柜中的运动控制器;所述电磁阀通过io接口接入所述电控柜中的io扩展板;所述电控柜中的运动控制板通过蓝牙控制所述远程控制模块。
4、本发明还提供了该巷道全自动测风控制系统的控制方法,包括以下步骤:
5、第一步骤:电控柜中的运控控制器给出io接口信号控制电磁阀打开供气开关,气动马达控制巷道全自动测风装置旋转到测风位置;
6、第二步骤:巷道全自动测风装置旋转到测风位置后深度相机采集风表的初始位置读数,且确保开始移动前风表的读数为零;
7、第三步骤:判断风表的读数是否复位为零:当风表的读数没有复位为零时,则执行风表的读数复位到零并重复第二步骤;当风表的读数复位为零时,则执行下一步骤;
8、第四步骤:启动风表的离合拨片后,通过路径规划算法控制风表移动并判断风表是否移动到位;
9、第五步骤:判断风表9是否运动到位:
10、当风表未运动到位时,则报警记录加一次并断开风表的离合拨片,复位风表的读数为零,同时判断报警次数是否大于三次;当报警次数不大于三次时,则执行第二步骤;当报警次数大于三次时,则触发故障报警并将巷道全自动测风装置旋转到停靠位置;
11、当风表运动到位时,则断开风表的离合拨片,并移动风表到起始位置;
12、第六步骤:深度相机采集风表的终点位置图片并上传解析的风表数据信息;
13、第七步骤:复位风表的读数为零,并由气动马达控制巷道全自动测风装置旋转到停靠位置。
14、本发明的有益效果是,(1)自动化一键完成测风整体动作,替换人工测风方式,实现降本增效;(2)采用六线式线路法测风,风表在移动轨迹上连续运转,相较于多点移动测风装置,更能保证测量结果的准确性;(3)风表移动轨迹可根据cnc编程订制,巷道全自动测风装置能适用于矩形、拱形等不同断面形状巷道的风速测量,相较于六线式测风装置,结构更为优化;(4)由于采用机械式风表进行风速测量,无需使用电缆,能避免电缆对风速测量的影响;(5)该巷道全自动测风装置具备初始位及测风位,工作时运动到测风位,工作完后运动到初始位,这种方式占用巷道空间小,不影响巷道内设备的正常通行,对于各类巷道的适用性更强。
15、根据本发明一个实施例,所述伺服驱动一体化电机有两个,它们分别为直线电机和旋转电机,所述直线电机用于控制风表做直线运动,所述旋转电机用于控制风表做旋转运动。
16、根据本发明一个实施例,所述风表为机械式风表。
17、根据本发明一个实施例,在第四步骤中,所述路径规划算法由cnc数控机床g代码和轴控逆解算法两部分组成。
18、根据本发明一个实施例,所述轴控逆解算法根据cnc规划路径中风表的位置解算出对应实现风表直线运动的直线电机的运动位置以及实现风表旋转运动的旋转电机的运动位置输出给对应轴控功能块smc_controlbypos。
19、根据本发明一个实施例,所述风表的运动控制步骤如下:
20、第1步骤:cnc编制轨迹g代码;
21、第2步骤:调用两轴插补运动功能块smc_interpolator,输入cnc轨迹,输出风表对应坐标信息(pi.dx,pi.dy);
22、第3步骤:调用逆解功能块,输出两轴对应轴控信息;
23、第4步骤:调用通过位置实现轴控功能块smc_controlaxisbypos,根据第3步骤的轴控信息对直线电机动力输出轴和旋转电机动力输出轴这两轴实时控制。
24、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
25、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种巷道全自动测风控制系统,其特征是:包括电控柜(1)、多传感融合计算盒(2)、深度相机(3)、伺服驱动一体化电机(4)、上位机(5)、电磁阀(6)、远程控制模块(7)和气动马达(8);
2.根据权利要求1所述的巷道全自动测风控制系统,其特征是:所述伺服驱动一体化电机(4)有两个,它们分别为直线电机和旋转电机,所述直线电机用于控制风表(9)做直线运动,所述旋转电机用于控制风表(9)做旋转运动。
3.根据权利要求2所述的巷道全自动测风控制系统,其特征是:所述风表(9)为机械式风表。
4.一种如权利要求1所述的巷道全自动测风控制系统的控制方法,其特征是,包括以下步骤:
5.根据权利要求4所述的巷道全自动测风控制系统的控制方法,其特征是:在第四步骤中,所述路径规划算法由cnc数控机床g代码和轴控逆解算法两部分组成。
6.根据权利要求5所述的巷道全自动测风控制系统的控制方法,其特征是:所述轴控逆解算法根据cnc规划路径中风表(9)的位置解算出对应实现风表(9)直线运动的直线电机的运动位置以及实现风表(9)旋转运动的旋转电机的运动位置输出给对应轴控功能块smc_controlbypos。
7.根据权利要求6所述的巷道全自动测风控制系统的控制方法,其特征是:所述风表(9)的运动控制步骤如下:
技术总结
本发明公开了一种巷道全自动测风控制系统及其控制方法,系统包括电控柜、多传感融合计算盒、深度相机、伺服驱动一体化电机、上位机、电磁阀、远程控制模块和气动马达;伺服驱动一体化电机通过CAN总线接入电控柜中的运动控制器;深度相机由GIGE接入多传感融合计算盒;多传感融合计算盒中的边缘计算模块将获取图像通过TCP传给上位机;多传感融合计算盒将图像识别的数据信息通过TCP或RS485传给电控柜中的运动控制器;电磁阀通过IO接口接入电控柜中的IO扩展板;电控柜中的运动控制板通过蓝牙控制远程控制模块。该系统及其控制方法,具有自动化程度高、测量准确性高、结构更为优化、无需使用电缆、适用性更强的优点。
技术研发人员:卞俊,陈晓晶,蒋伟,韩朝晖,贾文琪,单成伟,程刘胜,季亮,徐志飞,何敏,姚超修,卜滕滕
受保护的技术使用者:天地(常州)自动化股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!