架空线路阻尼间隔棒自动安装及拆卸机器人的制作方法
本发明涉及高空安拆作业机器人的,特指一种架空线路阻尼间隔棒自动安装及拆卸机器人。
背景技术:
1、阻尼间隔棒是一种能降低分裂导线微风振动或次档距振荡的柔性或半刚性间隔棒,是分裂导线结构中的主要金具,间隔棒的基本任务是防止导线之间的鞭击、抑制微风振动和次档距振荡。
2、阻尼间隔棒安装在架空线路之间,现有的阻尼间隔棒的安装及更换均是人工作业,工作人员需要在架空线路上行走至设定位置,而后手工进行阻尼间隔棒的安装或更换,阻尼间隔棒的重量也较重,工作人员高空携带不便,在安装或更换时,需要从地面吊装或者利用飞车在架空线路上运送,现有的飞车空间小,每次仅能运送一个阻尼间隔棒,间隔棒的运送以及人工作业存在效率低,风险高的问题,故,亟需提供一种新的解决方案。
技术实现思路
1、本发明的目的在于克服现有技术的缺陷,提供一种架空线路阻尼间隔棒自动安装及拆卸机器人,解决现有的架空线路阻尼间隔棒人工作业存在的效率低和风险高的问题。
2、实现上述目的的技术方案是:
3、本发明提供了一种架空线路阻尼间隔棒自动安装及拆卸机器人,包括:
4、基座;
5、设于所述基座上的行走装置,所述行走装置可沿架空线路进行行走;
6、设于所述基座上的间隔棒存放机构,用于放置待安装的间隔棒和/或拆卸下来的间隔棒;
7、以位置可调节的方式安装在所述基座上并靠近所述间隔棒存放机构设置的间隔棒夹持机构,用于夹持待安装的间隔棒和/或拆卸下来的间隔棒;
8、滑设在所述间隔棒夹持机构上的间隔棒安拆机构,通过滑动调节可靠近所述间隔棒夹持机构上夹持的间隔棒并用于控制间隔棒上的箍板进行打开或闭合;以及
9、设于所述基座上的部件装卸机构,在所述行走装置设于架空线路上时,所述部件装卸机构靠近架空线路设置,所述部件装卸机构用于安装或拆卸对应的间隔棒的箍板上的销轴及开口销。
10、本发明的机器人可实现在高空中自动安装或更换阻尼间隔棒,避免了人工高空作业,降低作业风险,且机器人上设置有间隔棒存放机构,能够存放较多数量的阻尼间隔棒,避免了现有间隔棒吊装及飞车运送存在的数量少、效率低的问题,且机器人自动安拆阻尼间隔棒的作业效率远高于人工作业效率,既能保证作业安全又具有较高的作业效率。
11、本发明架空线路阻尼间隔棒自动安装及拆卸机器人的进一步改进在于,所述部件装卸机构包括可移动调节的安装在所述基座上的安装架、可转动调节的安装在所述安装架上的开口销调向组件、可移动调节的安装在所述安装架上的开口销取出组件、设于所述安装架上的开口销存放结构、设于所述安装架上的销轴存放结构以及位置可调节的安装在所述安装架上的销轴取出组件;
12、所述开口销调向组件的端部设有与销轴相对应的夹固件,通过所述夹固件夹紧对应的销轴进而再配合转动调节以实现调节销轴上的销孔的方向;
13、所述开口销取出组件用于安装或拆卸对应的开口销;
14、所述销轴取出组件用于安装或拆卸对应的销轴。
15、本发明架空线路阻尼间隔棒自动安装及拆卸机器人的进一步改进在于,所述部件装卸机构还包括设于所述安装架上并与所述开口销取出组件相对设置的开口销展开组件,用于将开口销的尾部展开以实现开口销与销轴的固定。
16、本发明架空线路阻尼间隔棒自动安装及拆卸机器人的进一步改进在于,所述开口销取出组件包括旋转结构、设于所述旋转结构上的一对伸缩夹具以及设于所述伸缩夹具端部处的限位杆;
17、所述的一对伸缩夹具可伸缩调节,通过伸缩调节可使得一对伸缩夹具相互靠近或相互远离,从而使得所述限位杆可插入到开口销头部处的圆孔内或者自开口销头部处的圆孔内移出。
18、本发明架空线路阻尼间隔棒自动安装及拆卸机器人的进一步改进在于,所述销轴取出组件包括伸缩调节件以及设于所述伸缩调节件端部的电磁铁块,所述伸缩调节件可伸缩调节,所述电磁铁块在通电后可吸附对应的销轴。
19、本发明架空线路阻尼间隔棒自动安装及拆卸机器人的进一步改进在于,所述间隔棒安拆机构包括固定架、可转动调节的设于所述固定架上并与间隔棒上的箍板相对应设置的吸附板以及可伸缩调节的安装在所述固定架上的夹紧钳;
20、所述固定架滑设在所述间隔棒夹持机构上;
21、所述吸附板可吸附住对应的箍板,进而通过转动调节带动对应的箍板进行转动以实现箍板的打开或闭合,在箍板转动至闭合状态时,所述夹紧钳通过伸缩调节可夹紧对应的箍板以使得箍板完成对接。
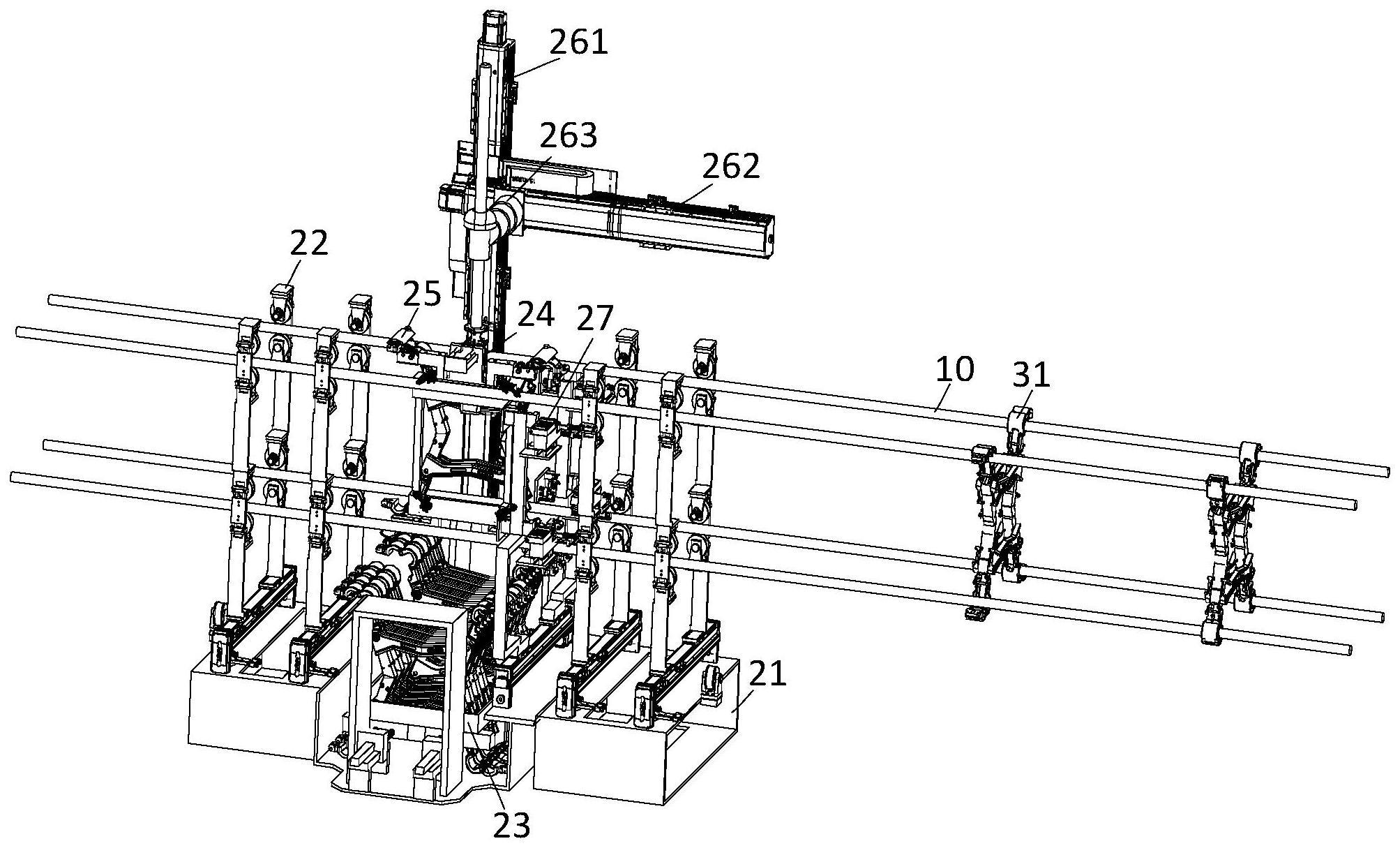
22、本发明架空线路阻尼间隔棒自动安装及拆卸机器人的进一步改进在于,所述基座上立设有竖向滑道、滑设于所述竖向滑道上的横向滑道以及滑设于所述横向滑道上的伸缩机械臂;
23、所述间隔棒夹持机构可转动的安装于所述伸缩机械臂的末端。
24、本发明架空线路阻尼间隔棒自动安装及拆卸机器人的进一步改进在于,所述间隔棒存放机构包括可移动调节的设于所述底座上的限位框架、与所述限位框架相对设置的限位板以及支撑连接在所述限位框架和所述基座之间的支撑弹簧,所述支撑弹簧对所述限位框架施加作用力以使得所述限位框架向所述限位板的方向移动,从而实现所述限位框架和所述限位板夹住对应的间隔棒。
25、本发明架空线路阻尼间隔棒自动安装及拆卸机器人的进一步改进在于,所述行走装置包括立设于所述基座上的多个支架,所述支架上对应架空线路设有间距可调节的一对滚轮,所述的一对滚轮通过调节间距可实现夹持在对应的架空线路上或者从对应的架空线路上脱离。
26、本发明架空线路阻尼间隔棒自动安装及拆卸机器人的进一步改进在于,所述的一对滚轮可转动的安装在对应的安装座上,相对的两个安装座之间连接有双向伸缩电缸,所述双向伸缩电缸可调节一对滚轮之间的间距。
技术特征:
1.一种架空线路阻尼间隔棒自动安装及拆卸机器人,其特征在于,包括:
2.如权利要求1所述的架空线路阻尼间隔棒自动安装及拆卸机器人,其特征在于,所述部件装卸机构包括可移动调节的安装在所述基座上的安装架、可转动调节的安装在所述安装架上的开口销调向组件、可移动调节的安装在所述安装架上的开口销取出组件、设于所述安装架上的开口销存放结构、设于所述安装架上的销轴存放结构以及位置可调节的安装在所述安装架上的销轴取出组件;
3.如权利要求2所述的架空线路阻尼间隔棒自动安装及拆卸机器人,其特征在于,所述部件装卸机构还包括设于所述安装架上并与所述开口销取出组件相对设置的开口销展开组件,用于将开口销的尾部展开以实现开口销与销轴的固定。
4.如权利要求2所述的架空线路阻尼间隔棒自动安装及拆卸机器人,其特征在于,所述开口销取出组件包括旋转结构、设于所述旋转结构上的一对伸缩夹具以及设于所述伸缩夹具端部处的限位杆;
5.如权利要求2所述的架空线路阻尼间隔棒自动安装及拆卸机器人,其特征在于,所述销轴取出组件包括伸缩调节件以及设于所述伸缩调节件端部的电磁铁块,所述伸缩调节件可伸缩调节,所述电磁铁块在通电后可吸附对应的销轴。
6.如权利要求1所述的架空线路阻尼间隔棒自动安装及拆卸机器人,其特征在于,所述间隔棒安拆机构包括固定架、可转动调节的设于所述固定架上并与间隔棒上的箍板相对应设置的吸附板以及可伸缩调节的安装在所述固定架上的夹紧钳;
7.如权利要求1所述的架空线路阻尼间隔棒自动安装及拆卸机器人,其特征在于,所述基座上立设有竖向滑道、滑设于所述竖向滑道上的横向滑道以及滑设于所述横向滑道上的伸缩机械臂;
8.如权利要求1所述的架空线路阻尼间隔棒自动安装及拆卸机器人,其特征在于,所述间隔棒存放机构包括可移动调节的设于所述底座上的限位框架、与所述限位框架相对设置的限位板以及支撑连接在所述限位框架和所述基座之间的支撑弹簧,所述支撑弹簧对所述限位框架施加作用力以使得所述限位框架向所述限位板的方向移动,从而实现所述限位框架和所述限位板夹住对应的间隔棒。
9.如权利要求1所述的架空线路阻尼间隔棒自动安装及拆卸机器人,其特征在于,所述行走装置包括立设于所述基座上的多个支架,所述支架上对应架空线路设有间距可调节的一对滚轮,所述的一对滚轮通过调节间距可实现夹持在对应的架空线路上或者从对应的架空线路上脱离。
10.如权利要求1所述的架空线路阻尼间隔棒自动安装及拆卸机器人,其特征在于,所述的一对滚轮可转动的安装在对应的安装座上,相对的两个安装座之间连接有双向伸缩电缸,所述双向伸缩电缸可调节一对滚轮之间的间距。
技术总结
本发明涉及一种架空线路阻尼间隔棒自动安装及拆卸机器人,包括:基座;设于基座上的行走装置,可沿架空线路进行行走;设于基座上的间隔棒存放机构,用于放置待安装的间隔棒和/或拆卸下来的间隔棒;以位置可调节的方式安装在基座上的间隔棒夹持机构,用于夹持待安装的间隔棒和/或拆卸下来的间隔棒;滑设在间隔棒夹持机构上的间隔棒安拆机构,用于控制间隔棒上的箍板进行打开或闭合;设于基座上的部件装卸机构,用于安装或拆卸对应的间隔棒的箍板上的销轴及开口销。本发明可实现在高空中自动安装或更换阻尼间隔棒,避免了人工高空作业,降低作业风险,既能保证作业安全又具有较高的作业效率。
技术研发人员:许少利,冷冬,徐滨,郑存强,秦四娟,李鲲,李铭,高会民,蔡云赵,杨军,王立军,吴海涛,徐之皓,赵爽,李蕾,齐云鹤,刘林林,张孟琛,冯伟,朱帅,侯世昌,叶鞠,孟菁,郝亮,刘照拯,李春超
受保护的技术使用者:国网冀北电力有限公司秦皇岛供电公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!