本发明涉及一种步进电机,尤其是涉及一种三相9极步进电机。
背景技术:
1、步进电机具有价格便宜,控制简单的优势,但步进电机在运行时震动噪音比较大,所以市场常见的降低噪音方法是细分控制、增加齿数、增加相数,常规的混合步进电机多为两相1.8°步进电机,增加控制精度的例如增加齿数的两相0.9°的步进电机,增加相数的三相1.2°步进电机、五相0.72°步进电机,但由于尺寸结构的限制,电机无法无限增加相数和齿数,例如42mm电机,定子极数增加到9极还可以,再增大极数电机的出力会大幅下降,即使控制精度再高也没有太大意义,但常规的三相9极电机有一个致命的缺陷,就是每相的三个极分布不均匀,导致电机运行时电机噪音比较大。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种三相9极步进电机。
2、本发明的目的可以通过以下技术方案来实现:
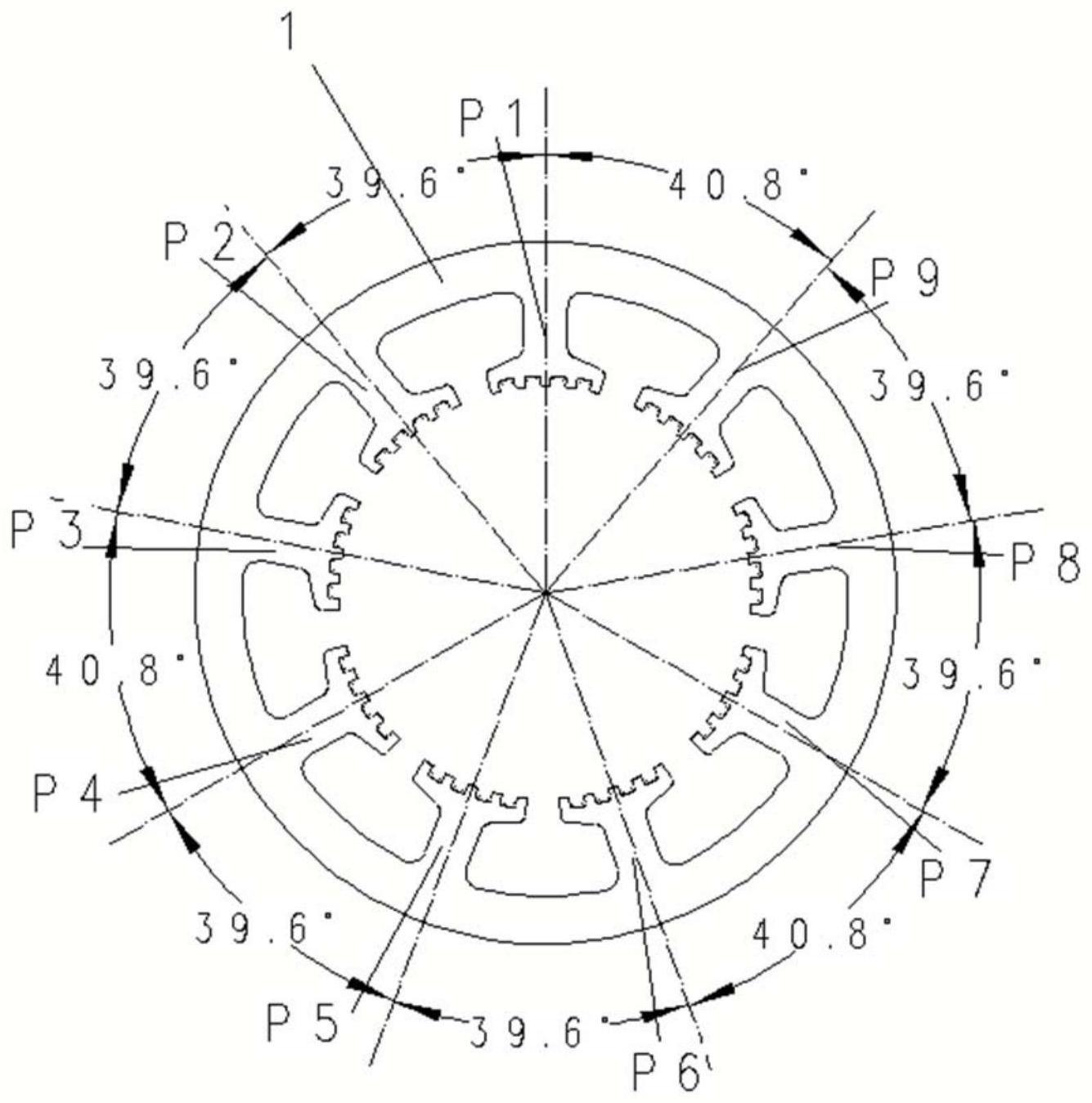
3、根据本发明的一个方面,提供了一种三相9极步进电机,包括定子冲片、绕组、转子冲片和磁条,所述定子冲片包括九个主极,分别为p1、p2、p3、p4、p5、p6、p7、p8和p9,其中主极p1、p2、p3分为a相,主极p4、p5、p6分为b相,主极p7、p8、p9分为c相,其中同相之间的相邻极夹角为39.6°,非同相且相邻极之间的夹角为40.8°。
4、作为优选的技术方案,所述定子冲片的外圆为44mm。
5、作为优选的技术方案,所述定子冲片的每个主极上的定子小齿齿数为5个。
6、作为优选的技术方案,所述绕组包括a相绕组、b相绕组和c相绕组,其中所述a相绕组在主极p1上顺时针绕线,在主极p2上逆时针绕线,在主极p3上顺时针绕线,或者三个主极同时反向绕线;
7、所述b相绕组在主极p4上顺时针绕线,在主极p5上逆时针绕线,在主极p6上顺时针绕线,或者三个主极同时反向绕线;
8、所述c相绕组在主极p7上顺时针绕线,在主极p8上逆时针绕线,在主极p9上顺时针绕线,或者三个主极同时反向绕线。
9、作为优选的技术方案,所述绕组的三相绕制方式相同,其中引出线a+、b+、c+引出接电源,引出线a-、b-、c-焊接在一起。
10、作为优选的技术方案,所述转子冲片的转子齿数为50齿,转子齿中间的槽放入磁条,其中磁条的放置为n极全部朝外或s极全部朝外。
11、作为优选的技术方案,所述转子冲片的外圆n极和s极沿轴向贯通。
12、作为优选的技术方案,该电机步距角为1.2°,采用通电方式是三相6拍的通电方式。
13、作为优选的技术方案,该电机三相同时通电,构成循环。
14、作为优选的技术方案,该电机采用电流控制的方法,输入电机的电流为相差120°电角度的正弦电流。
15、与现有技术相比,本发明具有以下优点:
16、1)本发明三相分布更均匀,提高了电机空间利用率;
17、2)本发明减小了电机运行时的波动和降低噪音。
技术特征:1.一种三相9极步进电机,包括定子冲片(1)、绕组(2)、转子冲片(3)和磁条(4),其特征在于,所述定子冲片(1)包括九个主极,分别为p1、p2、p3、p4、p5、p6、p7、p8和p9,其中主极p1、p2、p3分为a相,主极p4、p5、p6分为b相,主极p7、p8、p9分为c相,其中同相之间的相邻极夹角为39.6°,非同相且相邻极之间的夹角为40.8°。
2.根据权利要求1所述的一种三相9极步进电机,其特征在于,所述定子冲片(1)的外圆为44mm。
3.根据权利要求1所述的一种三相9极步进电机,其特征在于,所述定子冲片(1)的每个主极上的定子小齿齿数为5个。
4.根据权利要求1所述的一种三相9极步进电机,其特征在于,所述绕组(2)包括a相绕组、b相绕组和c相绕组,其中所述a相绕组在主极p1上顺时针绕线,在主极p2上逆时针绕线,在主极p3上顺时针绕线,或者三个主极同时反向绕线;
5.根据权利要求4所述的一种三相9极步进电机,其特征在于,所述绕组(2)的三相绕制方式相同,其中引出线a+、b+、c+引出接电源,引出线a-、b-、c-焊接在一起。
6.根据权利要求1所述的一种三相9极步进电机,其特征在于,所述转子冲片(3)的转子齿数为50齿,转子齿中间的槽放入磁条(4),其中磁条(4)的放置为n极全部朝外或s极全部朝外。
7.根据权利要求6所述的一种三相9极步进电机,其特征在于,所述转子冲片(3)的外圆n极和s极沿轴向贯通。
8.根据权利要求1所述的一种三相9极步进电机,其特征在于,该电机步距角为1.2°,采用通电方式是三相6拍的通电方式。
9.根据权利要求1所述的一种三相9极步进电机,其特征在于,该电机三相同时通电,构成循环。
10.根据权利要求1所述的一种三相9极步进电机,其特征在于,该电机采用电流控制的方法,输入电机的电流为相差120°电角度的正弦电流。
技术总结本发明涉及一种三相9极步进电机,包括定子冲片、绕组、转子冲片和磁条,所述定子冲片包括九个主极,分别为P1、P2、P3、P4、P5、P6、P7、P8和P9,其中主极P1、P2、P3分为A相,主极P4、P5、P6分为B相,主极P7、P8、P9分为C相,其中同相之间的相邻极夹角为39.6°,非同相且相邻极之间的夹角为40.8°。与现有技术相比,本发明具有提高了电机空间利用率,减小了电机运行时的波动和降低噪音等优点。
技术研发人员:李文亮
受保护的技术使用者:上海安浦鸣志自动化设备有限公司
技术研发日:技术公布日:2024/1/11