机器人充电方法、装置、计算机设备和存储介质与流程
本申请涉及机器人充电,特别是涉及一种机器人充电方法、装置、计算机设备和存储介质。
背景技术:
1、机器人在执行任务时,需要满足一定的电量,在执行任务中如果电量不足以支持机器人继续执行任务,机器人需要去补充电量。现有的机器人充电方式主要是由云端分配充电桩给机器人,而云端无法分辨分配的充电桩的状态;如果分配到坏的充电桩、充电存在故障的充电柱、易发生骑桩的充电桩等有问题的充电桩,则直接导致机器人无法及时的完成充电,进一步影响机器人执行任务。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高机器人充电效率的机器人充电方法、装置、计算机设备和存储介质。
2、一种机器人充电方法,应用于机器人,所述方法包括:
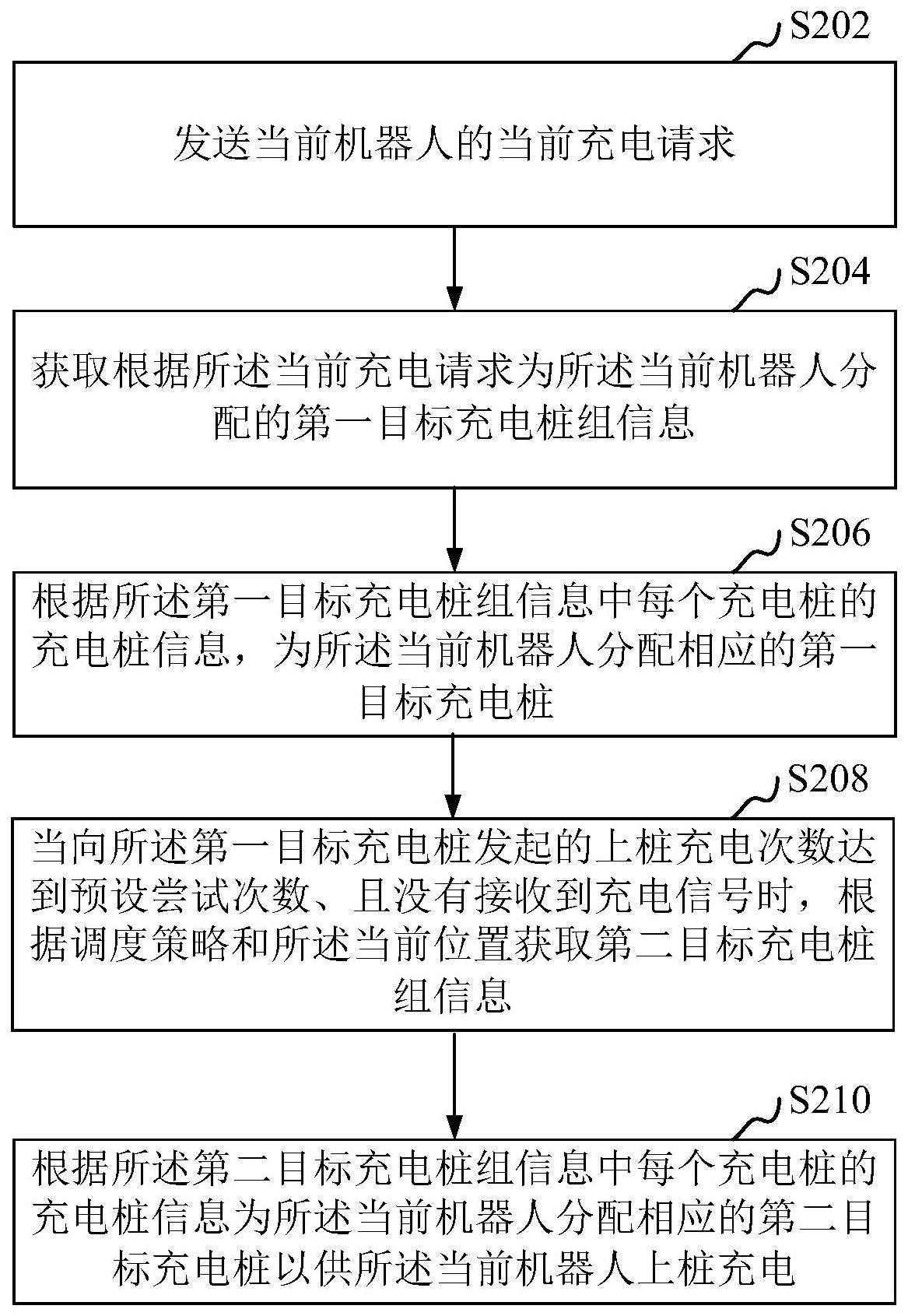
3、发送当前机器人的当前充电请求;所述当前充电请求携带当前机器人的当前位置;
4、获取根据所述当前充电请求为所述当前机器人分配的第一目标充电桩组信息;
5、根据所述第一目标充电桩组信息中每个充电桩的充电桩信息,为所述当前机器人分配相应的第一目标充电桩;
6、当向所述第一目标充电桩发起的上桩充电次数达到预设尝试次数、且没有接收到充电信号时,根据调度策略和所述当前位置获取第二目标充电桩组信息;
7、根据所述第二目标充电桩组信息中每个充电桩的充电桩信息为所述当前机器人分配相应的第二目标充电桩以供所述当前机器人上桩充电。
8、在一个实施例中,所述方法还包括:
9、响应所述当前机器人的当前充电请求;
10、获取距离所述当前位置预设范围内的第一目标充电桩组信息;所述第一目标充电桩组信息包括一个或多个充电桩信息。
11、在一个实施例中,所述根据调度策略和所述当前位置获取第二目标充电桩组信息包括:
12、根据调度策略将云端通信调度切换为近场通信调度;
13、通过近场通信获取所述当前机器人位于第一目标充电桩组时所获取到的所有待选充电桩信息;
14、从所述待选充电桩信息中获取距离所述当前位置预设范围内的第二目标充电桩组信息。
15、在一个实施例中,所述充电桩信息包括充电桩位置、充电桩占用状态、充电桩评分;所述根据所述第二目标充电桩组信息中每个充电桩的充电桩信息为所述当前机器人分配相应的第二目标充电桩以供所述当前机器人上桩充电包括:
16、根据所述第二目标充电桩组信息中每个充电桩的充电桩评分和充电桩占用状态,为所述当前机器人分配相应的第二目标充电桩;
17、向所述第二目标充电桩发送是否接受当前机器人的当前充电请求的问询信息;
18、当所述第二目标充电桩接受所述当前充电请求时,向距离所述当前位置预设范围内广播所述当前机器人和所述第二目标充电桩的充电状态。
19、在一个实施例中,所述方法还包括:
20、根据所述第二目标充电桩的充电信息按照预设评分规则进行打分,得到所述第二目标充电桩的当前充电桩评分和评分时间;
21、将所述当前充电桩评分和评分时间广播至距离所述当前位置预设范围内的机器人和充电桩。
22、在一个实施例中,所述方法还包括:
23、将所述当前充电桩评分和评分时间传输至服务器;
24、服务器用于接收所述当前机器人对所述第二目标充电桩的当前充电桩评分和评分时间;
25、基于所述当前充电桩评分按照预设评分更新规则对所述第二目标充电桩的评分进行更新,得到更新后的充电桩评分;
26、将所述第二目标充电桩对应的下一评分时间顺序的机器人作为当前机器人;
27、返回所述接收所述当前机器人对所述第二目标充电桩的当前充电桩评分和评分时间的步骤,直至更新后的充电桩评分满足充电桩禁止充电条件,按照预设禁止充电规则对所述第二目标充电桩进行处理。
28、在一个实施例中,充电桩禁止充电条件包括充电桩评分为负数;所述按照预设禁止充电规则对所述第二目标充电桩进行处理包括:
29、当所述第二目标充电桩更新后的充电桩评分从正数变为负数时,将所述第二目标充电桩进行拉黑处理;
30、当所述第二目标充电桩的连续拉黑次数满足预设次数时,将所述第二目标充电桩进行永久拉黑处理。
31、一种机器人充电装置,所述装置包括:
32、充电请求接收模块,用于发送当前机器人的当前充电请求;所述当前充电请求携带当前机器人的当前位置;
33、第一目标充电桩组确定模块,用于接收根据所述当前充电请求为所述当前机器人分配的第一目标充电桩组信息;
34、第一目标充电桩确定模块,用于根据所述第一目标充电桩组中每个充电桩的充电桩信息,为所述当前机器人分配相应的第一目标充电桩;
35、第二目标充电桩组确定模块,用于当向所述第一目标充电桩发起的上桩充电次数达到预设尝试次数、且没有接收到充电信号时,根据调度策略和所述当前位置获取第二目标充电桩组信息;
36、第二目标充电桩确定模块,用于根据所述第二目标充电桩组信息中每个充电桩的充电桩信息为所述当前机器人分配相应的第二目标充电桩以供所述当前机器人上桩充电。
37、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述机器人充电方法的步骤。
38、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述机器人充电方法的步骤。
39、上述机器人充电方法、装置、计算机设备和存储介质,通过发送当前机器人的当前充电请求,进而服务器或当前机器人响应当前充电请求为当前机器人分配第一目标充电桩组;进而当前机器人根据第一目标充电桩组中每个充电桩的充电桩信息为当前机器人分配第一目标充电桩,当前机器人向第一目标充电桩发起上桩充电,并在上桩充电次数达到预设尝试次数且没有接收到充电信号时,根据调度策略和当前位置获取第二目标充电桩组,然后根据第二目标充电桩组中每个充电桩的充电桩信息分配第二目标充电桩以供当前机器人上桩充电,通过获取机器人附近位置的所有充电桩,并根据充电桩的评分分配充电桩,避免了服务器盲目分配有问题的充电桩给机器人进行充电,由此导致的机器人不能及时充电的问题。并且在云端分配的充电桩不可以提供充电时及时切换调度策略,采用机器人的近场通信获取当前机器人周围的所有充电桩的充电桩信息,通过置信度更高的近场通信采集的充电桩信息,可以在云端调度失败的情况下更加准确的调度到合适的充电桩为当前机器人进行充电。进一步,本方案还提供了一种评价充电桩有效的评分体系,对充电桩的充电状态进行评价,从而可以在机器人请求充电时,根据充电桩的评分选取充电状态较好、同时又靠近机器人的充电桩给机器人充电,使得机器人可以获取到有效的充电桩进行充电。
技术特征:
1.一种机器人充电方法,应用于机器人,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述根据调度策略和所述当前位置获取第二目标充电桩组信息包括:
4.根据权利要求1所述的方法,其特征在于,所述充电桩信息包括充电桩位置、充电桩占用状态、充电桩评分;所述根据所述第二目标充电桩组信息中每个充电桩的充电桩信息为所述当前机器人分配相应的第二目标充电桩以供所述当前机器人上桩充电包括:
5.根据权利要求1所述的方法,其特征在于,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,充电桩禁止充电条件包括充电桩评分为负数;所述按照预设禁止充电规则对所述第二目标充电桩进行处理包括:
8.一种机器人充电装置,其特征在于,所述装置包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请涉及机器人充电领域,提供了一种机器人充电方法、装置、计算机设备和存储介质。所述方法包括:发送当前机器人的当前充电请求;获取根据所述当前充电请求为所述当前机器人分配的第一目标充电桩组信息;根据所述第一目标充电桩组信息中每个充电桩的充电桩信息,为所述当前机器人分配相应的第一目标充电桩;当向所述第一目标充电桩发起的上桩充电次数达到预设尝试次数、且没有接收到充电信号时,根据调度策略和所述当前位置获取第二目标充电桩组信息;根据所述第二目标充电桩组信息中每个充电桩的充电桩信息为所述当前机器人分配相应的第二目标充电桩以供所述当前机器人上桩充电。采用本方法能够提高机器人充电效率。
技术研发人员:朱捷
受保护的技术使用者:上海有个机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!