一种智慧电机、电机控制方法以及超大规模电机控制系统
本发明属于机电控制领域,尤其涉及一种智慧电机、智慧电机控制方法以及基于智慧电机的超大规模控制系统。
背景技术:
1、伺服电机系统是由多个伺服电机组成的电机系统,广泛使用在工程领域,其应用场景包括但不限于电动汽车、仿生机器人、隧道盾构机、报纸印刷机、万向传送带等。上述领域要求对系统中的多个电机做到实时驱动与协调控制。
2、在现有的伺服电机系统中,伺服电机单元通常采用驱动模块与控制模块分离的方式。这种分布式的设计思路使得系统中伺服电机单元需要单独外接控制器,才能实现功能控制,虽然这样也能满足伺服电机系统的控制要求,但增大了整个伺服电机系统的接线难度以及空间尺寸,同时增加了整个系统设计的复杂性,特别是对于传统伺服电机系统中一个主控制器控制多个电机单元,大大增加了主控制器算法实现的难度以及代码的冗余性。
3、进一步的,为了满足伺服电机系统在隧道盾构机、万向传送带以及工业自动化等大型工业领域对若干个伺服电机单元的控制要求,保证对伺服电机系统中伺服电机单元的实时控制,传统伺服电机系统中采用的线性通信拓扑结构受到总线负载率的影响,使得伺服电机系统中伺服电机单元的数目也受到了限制,这大大阻碍了伺服电机系统在大型工业领域的应用。
技术实现思路
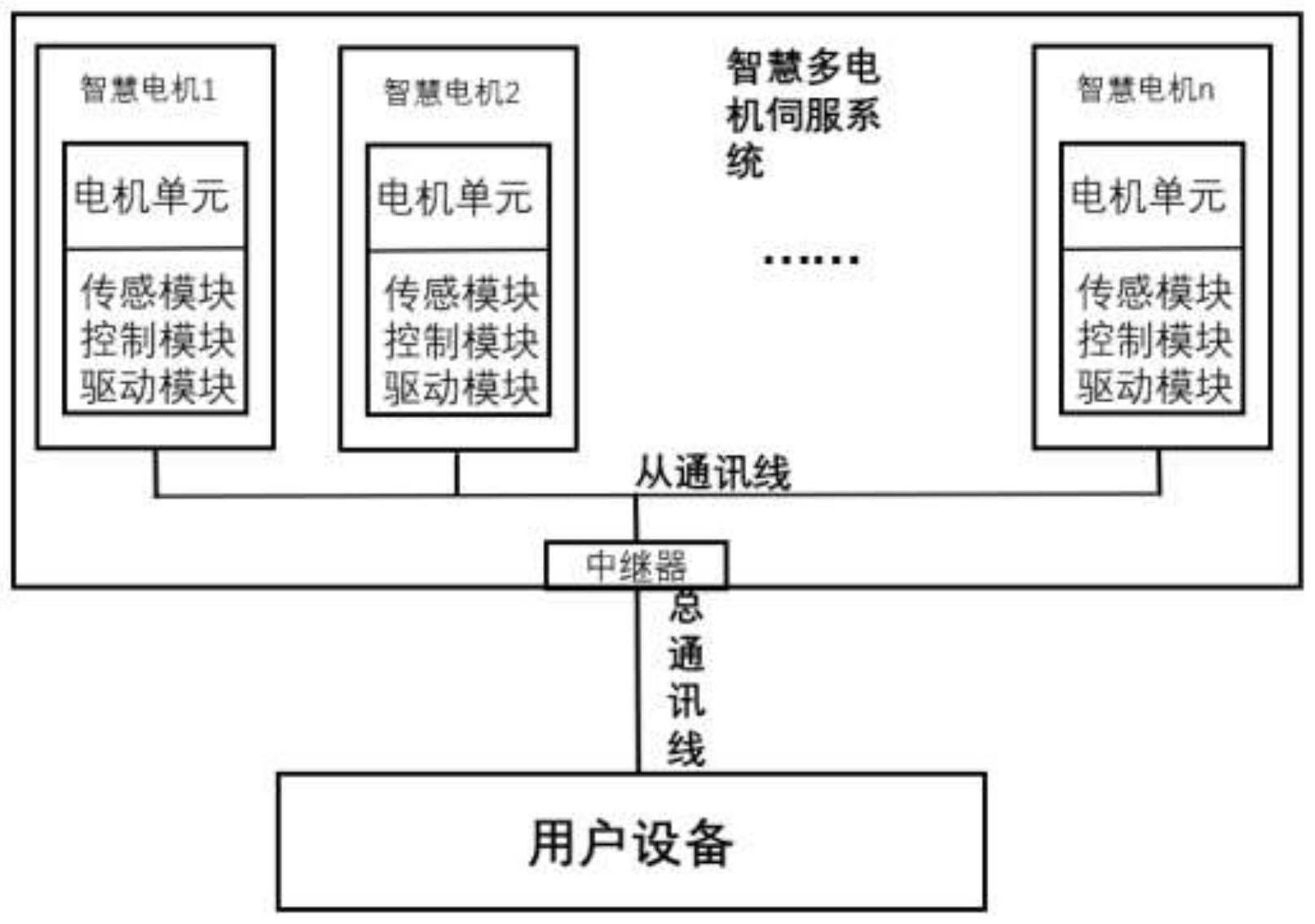
1、本发明伺服电机采用驱动模块、控制模块一体化的方式,将驱动模块与控制模块全部集成到了电机单元中,不用外接控制器,而且减少了伺服电机单元的空间尺寸。进一步的,采用的混合式树状通信拓扑结构,通过中继转发的方式,拓展了网络下的通信节点数目,在保证高实时性的同时,使得伺服电机系统中电机单元数目可以进一步得到提升,实现了对超大规模智慧电机的同步并行通信并完成对应电机的控制。
2、为解决上述问题,本发明提出的技术方案是,
3、一种智慧电机,包括
4、电机模块,包括电机轴、电机和磁环;
5、控制模块,所述控制模块接收控制信号,根据所述控制信号控制所述电机模块工作;
6、驱动模块,所述驱动模块用于将输入信号转变为所述控制信号;
7、传感模块,所述传感模块用于收集所述电机模块的实时工作状态,将所述实时工作状态传给所述控制模块,为所述控制模块调整所述电机模块工作状态提供依据。
8、进一步的,所述控制模块包括,
9、复位模块,所述复位模块用于重置控制器中程序,防止控制器功能异常;
10、时钟模块,所述时钟模块用以给控制器提供稳定的时钟信号;
11、电源模块,所述电源模块用于给控制器提供工作电压;
12、调试模块,所述调试模块用以向控制模块中烧录程序,并调试程序;
13、控制器,所述控制器为微控制芯片mcu,用以执行电机相应的控制算法,协调各功能模块。
14、进一步的,所述驱动模块包括,
15、驱动器,所述驱动器用于转换输入信号;
16、驱动电源模块,所述驱动电源模块为所述驱动器提供基础工作电压与参考电压,其中,
17、所述参考电压既驱动器输出信号的电压值。
18、进一步的,所述传感模块包括
19、传感器,所述传感器通过其自带的通信接口,将电机的转动情况实时传输给所述控制模块;
20、传感电源模块,所述传感电源模块用于给所述传感器提供基础工作电压。
21、一种电机控制方法,
22、接收控制指令,判断所述控制指令类型;
23、解析所述控制指令,根据指令类型执行相应的功能;结合所述指令类型从数据段中取出控制参数;
24、将取出的所述控制参数放入相应的寄存器中,执行电机控制算法产生相应的驱动信号;
25、处理所述驱动信号,对其进行相应的信号转换,所述转换后的驱动信号驱动电机转动;
26、获取电机的转动变化,根据所述电机的转动变化情况,实现对电机的控制进行调整。
27、进一步的,所述控制指令包括,通信自检、电机自检、电机转角、电机转圈、电机调速。
28、一种超大规模智慧电机控制系统,包括智慧伺服电机、通讯总线和中继器,所述中继器与若干智慧伺服电机之间采用并行通信方式实现通信。
29、进一步的,所述通讯总线在多电机控制器与中继器之间选择为can通信线。
30、进一步的,所述通讯总线在中继器与智慧伺服电机之间采用i2c通讯线。
31、进一步的,所述中继器为无线中继模块,所述无线中继器模块用于将输入指令信号转变为所述控制信号,并通过zigbee无线网络传输给智慧电机单元,实现对电机单元的无线控制。
32、本发明有益效果是:
33、设计的智慧电机,使用者不需要进行额外的控制程序设计,只需要通过预留通信线输入相应的指令,即可完成对电机系统的控制,使得每个电机系统有着单独处理数据,执行功能的能力。
34、相较于传统的电机单元,本发明所设计的智慧电机使用过程中布线简单,使用更加便捷,操作难度更低。进一步的,本发明所采用的混合式树状通信拓扑结构,采用中继转发的方式,拓展了网络下的通信节点数目,在保证高实时性的同时,使得电机系统中电机单元数目可以进一步得到提升,实现了对大规模,尤其是数量在102~104左右的智慧电机的同步并行控制。
技术特征:
1.一种智慧电机,其特征在于,包括
2.根据权利要求1所述的一种智慧电机,其特征在于,所述控制模块包括
3.根据权利要求1所述的一种智慧电机,其特征在于,所述驱动模块包括
4.根据权利要求1所述的一种智慧电机,其特征在于,所述传感模块包括
5.一种电机控制方法,其特征在于,
6.根据权利要求5所述的电机控制方法,其特征在于,所述控制指令包括,通信自检、电机自检、电机转角、电机转圈、电机调速。
7.一种超大规模电机控制系统,包括权利要求1-6所述的智慧伺服电机、通讯总线和中继器,其特征在于,所述中继器与若干智慧伺服电机之间采用并行通信方式实现通信。
8.根据权利要求7所述的超大规模电机控制系统,其特征在于,所述通讯总线在多电机控制器与中继器之间选择为can通信线。
9.根据权利要求7所述的超大规模电机控制系统,其特征在于,所述通讯总线在中继器与智慧伺服电机之间采用i2c通讯线。
10.根据权利要求7-9任一所述超大规模电机控制系统,其特征在于,所述中继器为无线中继模块,所述无线中继器模块用于将输入指令信号转变为所述控制信号,并通过zigbee无线网络传输给智慧电机单元,实现对电机单元的无线控制。
技术总结
本发明公开了一种智慧电机、电机控制方法以及超大规模电机控制系统。设计的智慧电机,使用者不需要进行额外的控制程序设计,只需要通过预留通信线输入相应的指令,即可完成对伺服电机系统的控制。相较于传统的普通电机单元,本发明所设计的智慧伺服电机使用过程中布线简单,使用更加便捷,操作难度更低。进一步的,本发明所采用的混合式树状通信拓扑结构,采用中继转发的方式,拓展了网络下的通信节点数目,在保证高实时性的同时,使得伺服电机系统中电机单元数目可以进一步得到提升。
技术研发人员:黄志超,邱嵩,王邦继,刘庆想
受保护的技术使用者:西南交通大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!