永磁同步电机低分辨率位置传感器容错控制方法及系统
本发明涉及永磁同步电机控制,具体涉及一种永磁同步电机低分辨率位置传感器容错控制方法及系统。
背景技术:
1、随着电动助力车的发展,其作为一种便捷、环保的交通工具在国内外有着广大的市场前景,低分辨率位置传感器,如开关型霍尔位置传感器凭借其价格低廉,响应迅速,可满足矢量控制要求等优点,常被应用于电动助力车的永磁同步电机矢量控制中。
2、在日常使用中,安装于电机转子轴末端或轮毂内侧的霍尔位置传感器,会因恶劣的路况与各类碰撞造成传感器线路或结构损坏,导致控制系统无法正常工作,危害行车安全。
3、因此,如何及时转换转子位置检测策略,以应对特殊情况下位置传感器失效导致控制系统无法正常工作,成为目前亟待解决的问题。
技术实现思路
1、有鉴于此,本发明实施例提供了一种永磁同步电机低分辨率位置传感器容错控制方法及系统,以解决现有技术中缺少及时转换转子位置检测策略研究,导致的特殊情况下位置传感器失效导致控制系统无法正常工作的问题。
2、本发明实施例提供了一种永磁同步电机低分辨率位置传感器容错控制方法,包括:
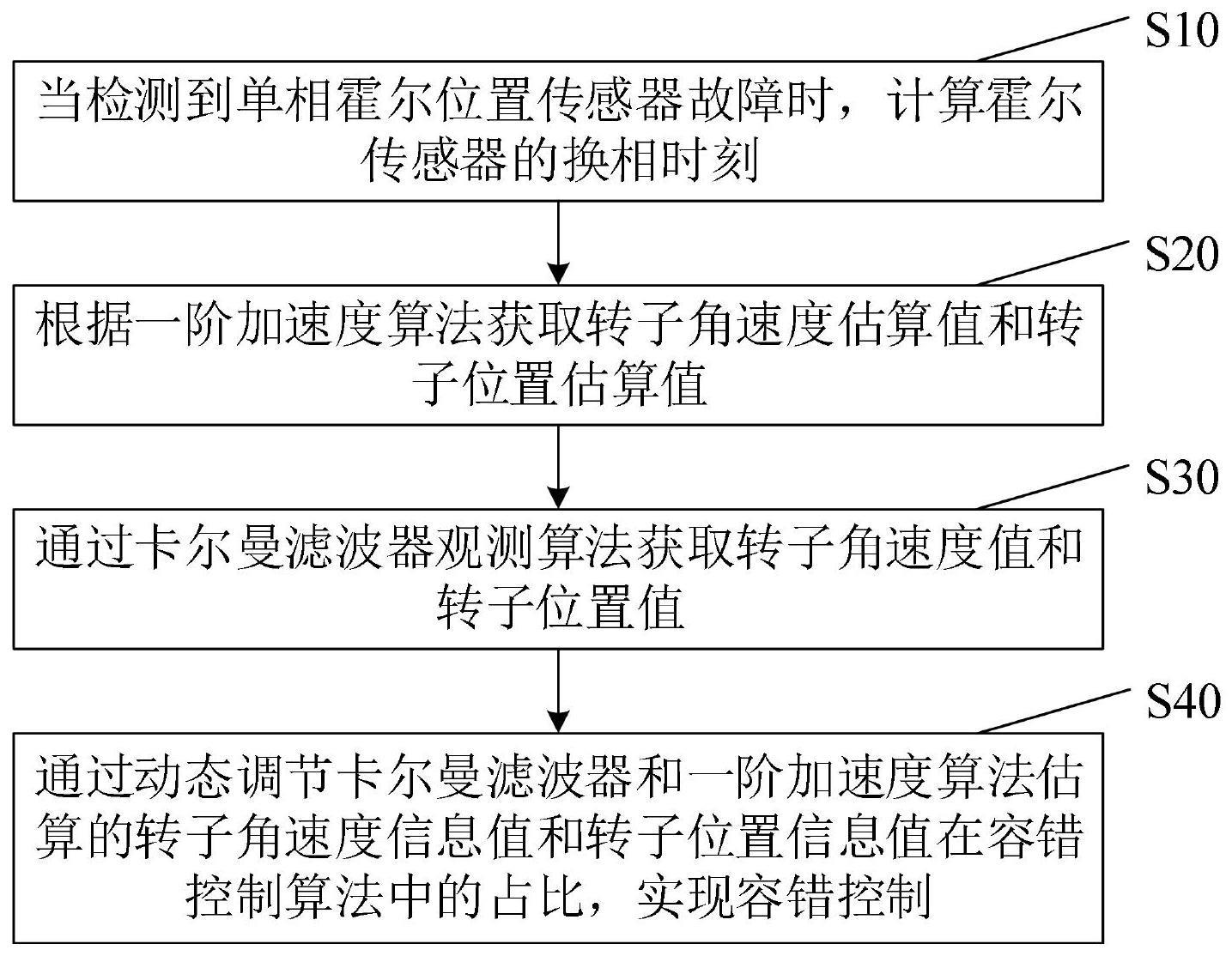
3、当检测到单相霍尔位置传感器故障时,计算霍尔传感器的换相时刻;
4、根据一阶加速度算法获取转子角速度估算值和转子位置估算值;
5、通过卡尔曼滤波器观测算法获取转子角速度值和转子位置值;
6、通过动态调节卡尔曼滤波器和一阶加速度算法估算的转子角速度信息值和转子位置信息值在容错控制算法中的占比,实现容错控制。
7、可选地,还包括:
8、对霍尔传感器进行故障检测;
9、若发生故障,则获取故障特征值;
10、根据故障特征值获取故障类型,确定故障霍尔。
11、可选地,根据故障特征值获取故障类型,确定故障霍尔,包括:
12、通过比对霍尔传感器理想输出状态与其余两路正常霍尔传感器输出信号,诊断当前霍尔输出信号是否发生故障。
13、可选地,计算霍尔传感器的换相时刻,包括:
14、根据τ时刻的转子位置、机械角速度、机械角加速度和相邻三相霍尔周期信号的开始时刻,获取相邻周期区间内的加速度、t时刻下的转子位置和角速度;
15、根据换相三相霍尔信号周期之间的电角度差、电机极对数、相邻周期区间内的加速度获取时刻差;
16、根据时刻差获取关于电角度的霍尔信号跳变补偿时刻估算函数。
17、可选地,根据一阶加速度算法获取转子角速度估算值和转子位置估算值,包括:
18、通过传统加速度估算转子位置算法获取第一估算角加速度;
19、将第一估算角加速度与通过霍尔区间位置估算的一阶加速度相合,得到第二估算角加速度;
20、将第二估算角加速度代入到传统一阶加速度算法中角度估算方程中,获得转子角速度估算值和转子位置估算值。
21、可选地,通过卡尔曼滤波器观测算法获取转子角速度值和转子位置值,包括:
22、根据表贴式永磁同步电机的定子方程和机械运动方程,以定子dq轴电流、转速、转子位置和负载转矩为状态变量,获取转子信号状态方程。
23、可选地,还包括:
24、根据转子信号状态方程获取转子位置信号;
25、对转子位置信号进行去噪处理,恢复位置信号。
26、可选地,通过动态调节卡尔曼滤波器和一阶加速度算法估算的转子角速度信息值和转子位置信息值在容错控制算法中的占比,实现容错控制,包括:
27、分别对卡尔曼滤波器和一阶加速度算法设置权重系数。
28、本发明实施例还提供了一种永磁同步电机低分辨率位置传感器容错控制系统,应用前述任一的永磁同步电机低分辨率位置传感器容错控制方法,包括:
29、霍尔传感器故障诊断模块,用于在电机霍尔传感器故障情况下,通过检测各区间霍尔信号结合故障状态并输出故障特征值,从而判断霍尔传感器故障类型,实现对电机位置传感器故障情况下的实时监测和诊断;
30、一阶加速度算法模块,用于获取转子角速度估算值和转子位置估算值;
31、卡尔曼滤波算法模块,用于获取转子角速度值和转子位置值;
32、加权计算模块,用于将一阶加速度算法模块和卡尔曼滤波算法模块的估算结果进行加权计算;
33、容错控制模块,用于将加权计算模块计算得到的转子位置估算结果与传感器检测位置结果替换。
34、本发明实施例的有益效果:
35、本发明提供了一种永磁同步电机的容错控制方法,在对加速度算法估算转子子位置在电机速度变化快时噪声干扰大的情况,提出了利用卡尔曼滤波器原理对系统信号进行降噪处理,在原有估算方法上进行改进,解决了永磁同步电机在霍尔传感器故障后难以精确估算转子位置问题。此外,针对霍尔传感器故障的各种情况进行总结,并针对情况赋予特征值,能够及时准确的判断霍尔传感器故障情况。
技术特征:
1.一种永磁同步电机低分辨率位置传感器容错控制方法,其特征在于,包括:
2.根据权利要求1所述的永磁同步电机低分辨率位置传感器容错控制方法,其特征在于,还包括:
3.根据权利要求2所述的永磁同步电机低分辨率位置传感器容错控制方法,其特征在于,根据所述故障特征值获取故障类型,确定故障霍尔,包括:
4.根据权利要求1所述的永磁同步电机低分辨率位置传感器容错控制方法,其特征在于,计算所述霍尔传感器的换相时刻,包括:
5.根据权利要求1所述的永磁同步电机低分辨率位置传感器容错控制方法,其特征在于,根据一阶加速度算法获取转子角速度估算值和转子位置估算值,包括:
6.根据权利要求1所述的永磁同步电机低分辨率位置传感器容错控制方法,其特征在于,通过卡尔曼滤波器观测算法获取转子角速度值和转子位置值,包括:
7.根据权利要求6所述的永磁同步电机低分辨率位置传感器容错控制方法,其特征在于,还包括:
8.根据权利要求1所述的永磁同步电机低分辨率位置传感器容错控制方法,其特征在于,通过动态调节所述卡尔曼滤波器和所述一阶加速度算法估算的转子角速度信息值和转子位置信息值在容错控制算法中的占比,实现容错控制,包括:
9.一种永磁同步电机低分辨率位置传感器容错控制系统,应用如权利要求1~8任一所述的永磁同步电机低分辨率位置传感器容错控制方法,其特征在于,包括:
技术总结
本发明公开了一种永磁同步电机低分辨率位置传感器容错控制方法及系统,其中方法包括:当检测到单相霍尔位置传感器故障时,计算霍尔传感器的换相时刻;根据一阶加速度算法获取转子角速度估算值和转子位置估算值;通过卡尔曼滤波器观测算法获取转子角速度值和转子位置值;通过动态调节卡尔曼滤波器和一阶加速度算法估算的转子角速度信息值和转子位置信息值在容错控制算法中的占比,实现容错控制。本实施例在对加速度算法估算转子子位置在电机速度变化快时噪声干扰大的情况,提出了利用卡尔曼滤波器原理对系统信号进行降噪处理,在原有估算方法上进行了改进,解决了永磁同步电机在霍尔传感器故障后难以精确估算转子位置问题。
技术研发人员:孟智超,魏海峰,李垣江,王浩陈
受保护的技术使用者:江苏科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!