一种马达的定位组装方法及马达的定位组装系统与流程
本发明涉及组装,尤其涉及一种马达的定位组装方法及马达的定位组装系统。
背景技术:
1、随着技术的进步,马达得到广泛的应用。马达一般包括振子和定子。现有的马达振子和定子组装一般是通过治具定位,由于在马达的振子和定子之间进行定位时,需要在磁钢干扰的状态下完成。现有的马达的振子和定子的组装方法存在定位误差,影响马达的振子和定子组装的精度的问题。
技术实现思路
1、本发明提供一种马达的定位组装方法及马达的定位组装系统,以解决现有的马达的振子和定子的组装方法存在定位误差,影响马达的振子和定子组装的精度的问题。
2、为实现上述技术问题,本发明采用以下技术方案:
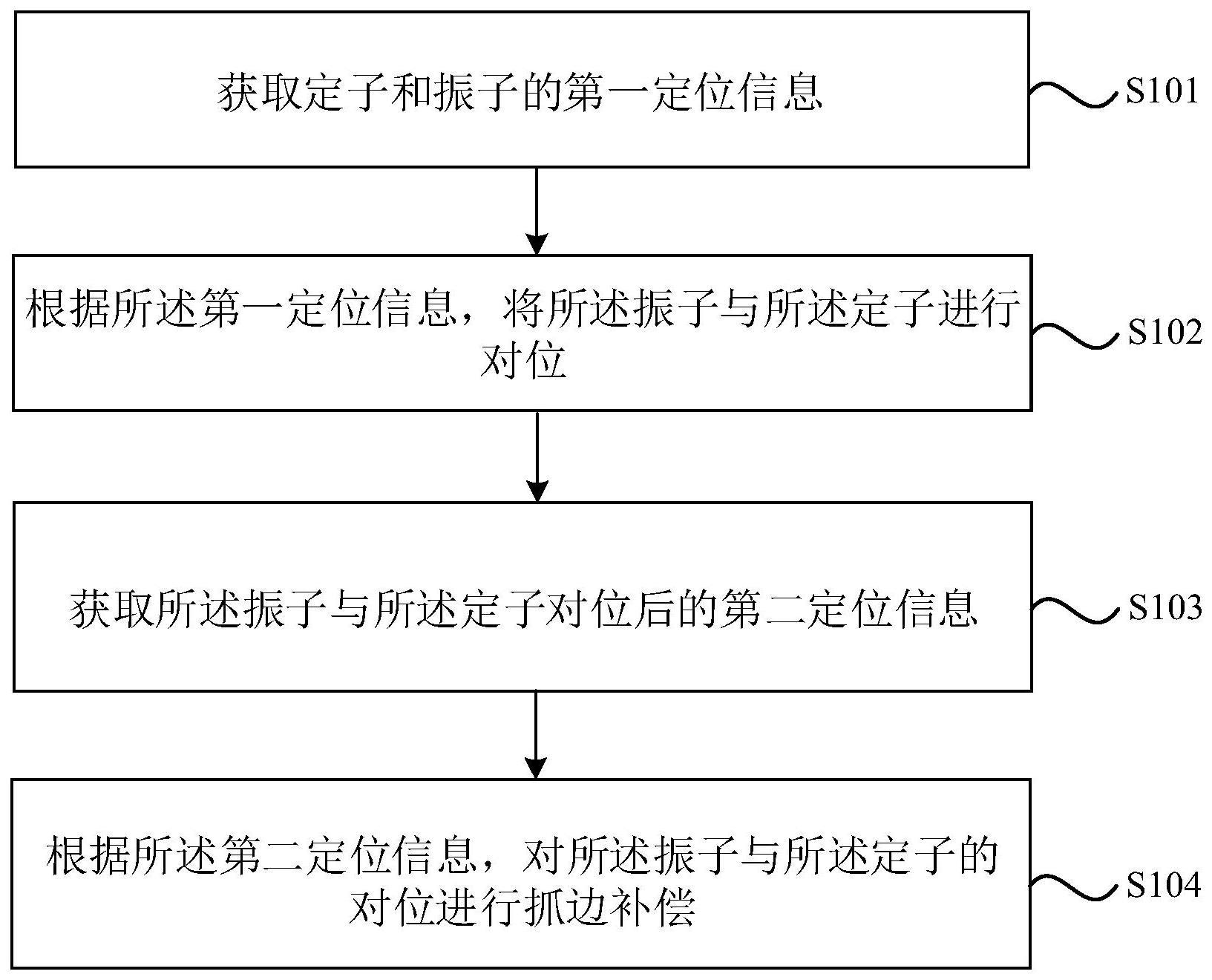
3、本发明提供了一种马达的定位组装方法,包括:
4、获取定子和振子的第一定位信息;
5、根据所述第一定位信息,将所述振子与所述定子进行对位;
6、获取所述振子与所述定子对位后的第二定位信息;
7、根据所述第二定位信息,对所述振子与所述定子的对位进行抓边补偿。
8、可选的,所述获取所述定子与所述振子的第一定位信息,包括:
9、获取所述定子的第一位置信息;
10、获取所述振子的第二位置信息。
11、可选的,所述根据所述第一定位信息,将所述振子与所述定子进行对位,包括:
12、根据所述定子的第一位置信息和所述振子的第二位置信息,将定子中心和振子中心进行对位,并将所述振子与所述定子沿水平方向进行对位。
13、可选的,所述获取所述振子与所述定子对位后的第二定位信息,包括:
14、获取所述振子与所述定子对位后的所述定子的第三位置信息;
15、获取所述振子与所述定子对位后的所述振子的第四位置信息。
16、可选的,所述根据所述第二定位信息,对所述振子与所述定子的对位进行抓边补偿,包括:
17、根据所述定子的第三位置信息,对所述定子进行抓边,得到所述定子的边缘距离所述定子中心的尺寸;
18、根据所述振子的第四位置信息,对所述振子进行抓边,得到所述振子的边缘距离所述振子中心的尺寸;
19、根据所述定子的边缘距离所述定子中心的尺寸与所述振子的边缘距离所述振子中心的尺寸,对所述振子在所述定子中的水平位置进行补偿,得到补偿后的所述振子的位置信息。
20、可选的,在所述根据所述第二定位信息,对所述振子与所述定子的对位进行抓边补偿之后,还包括:
21、根据补偿后的所述振子的位置信息,控制所述振子沿z方向组装至所述定子。
22、可选的,所述根据所述定子的边缘距离所述定子中心的尺寸与所述振子的边缘距离所述振子中心的尺寸,对所述振子在所述定子中的水平位置进行补偿,得到补偿后的所述振子的位置信息,包括:
23、根据所述定子的各边缘至所述定子中心的尺寸与对应的所述振子的边缘至所述振子中心的尺寸的差值,确定待补偿参数;
24、根据所述待补偿参数,对所述振子在所述定子中的水平位置进行调节,得到补偿后的所述振子的位置信息。
25、可选的,所述根据所述定子的各边缘至所述定子中心的尺寸与对应的所述振子的边缘至所述振子中心的尺寸的差值,确定待补偿参数,包括:
26、将所述定子的各边缘距离所述定子中心的尺寸与对应的所述振子的边缘距离所述振子中心的尺寸的作差,得到实际差值;
27、将所述实际差值与预设阈值进行比较,生成比较结果;
28、当所述实际差值大于或等于所述预设阈值时,生成待补偿参数。
29、根据本发明的另一方面,本发明提供一种马达的定位组装系统,包括:
30、第一图像采集模块,用于获取定子和振子的第一定位信息;
31、对位模块,用于根据所述第一定位信息,将所述振子与所述定子进行对位;
32、第二图像获取模块,用于获取所述振子与所述定子对位后的第二定位信息;
33、补偿模块,用于根据所述第二定位信息,对所述振子与所述定子的对位进行抓边补偿。
34、可选的,本实施例提供的马达的定位组装系统还包括:
35、机械臂,用于根据补偿后的所述振子的位置信息,控制所述振子沿z方向组装至所述定子。
36、本发明提供的马达的定位组装方法,通过获取定子和振子的第一定位信息,并根据第一定位信息,将振子与定子进行对位。然后获取所述振子与所述定子对位后的第二定位信息,根据第二定位信息,对振子与定子的对位进行抓边补偿。通过两次获取振子和定子之间的相对位置信息,可以较好的将对位后的振子与定子的对位信息进行补偿,从而以补偿后的振子与定子的位置信息进行对位组装,提高了振子与定子之间的对位精度。
技术特征:
1.一种马达的定位组装方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述获取所述定子与所述振子的第一定位信息,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述第一定位信息,将所述振子与所述定子进行对位,包括:
4.根据权利要求1所述的方法,其特征在于,所述获取所述振子与所述定子对位后的第二定位信息,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述第二定位信息,对所述振子与所述定子的对位进行抓边补偿,包括:
6.根据权利要求5所述的方法,其特征在于,在所述根据所述第二定位信息,对所述振子与所述定子的对位进行抓边补偿之后,还包括:
7.根据权利要求5所述的方法,其特征在于,所述根据所述定子的边缘距离所述定子中心的尺寸与所述振子的边缘距离所述振子中心的尺寸,对所述振子在所述定子中的水平位置进行补偿,得到补偿后的所述振子的位置信息,包括:
8.根据权利要求7所述的方法,其特征在于,所述根据所述定子的各边缘至所述定子中心的尺寸与对应的所述振子的边缘至所述振子中心的尺寸的差值,确定待补偿参数,包括:
9.一种马达的定位组装系统,其特征在于,包括:
10.根据权利要求9所述的系统,其特征在于,还包括:
技术总结
本发明公开一种马达的定位组装方法及马达的定位组装系统。该马达的定位组装方法包括:获取定子和振子的第一定位信息;根据所述第一定位信息,将所述振子与所述定子进行对位;获取所述振子与所述定子对位后的第二定位信息;根据所述第二定位信息,对所述振子与所述定子的对位进行抓边补偿。本实施例提供的技术方案通过两次获取振子和定子之间的相对位置信息,可以较好的将对位后的振子与定子的对位信息进行补偿,从而以补偿后的振子与定子的位置信息进行对位组装,提高了振子与定子之间的对位精度。
技术研发人员:朱红军,杨一乔,孙成林
受保护的技术使用者:昆山联滔电子有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!