一种转子单片、转子、电机以及机器人的制作方法
本申请涉及电机领域,具体而言,涉及一种转子单片,还涉及一种转子,还有一种电机,以及一种机器人。
背景技术:
1、电机一般包括定子和转子,通过在转子上设置永磁体,并向定子通电产生可变磁场,利用电磁原理可实现转子的旋转。
2、其中对于永磁体而言,现有技术中的永磁体通常设于转子的外圆周面上,所采用的连接方法一般是直接利用胶水等材料将永磁体与转子向贴合。这种方案所具有的问题是在高速电机中,转子在旋转时永磁体在离心作用下易脱落,轻则电机被损毁,重则造成人员伤亡。为了防止永磁体脱落,部分现有技术选择在转子外套设一个防护装置用于阻挡永磁体,但是设置防护装置会导致永磁体与定子之间的间隙较大,导致磁漏也随之增加,影响电机性能。
3、有鉴于此,现有技术中还提供了一种内嵌式的转子,这种转子中永磁体是嵌在转子内的,有效防止了永磁体受离心作用影响而脱落。但是,这种内嵌式的电机同样存在其问题。在实际应用中发现,内嵌式的转子需要由弱磁控制算法才能有效进行控制,但是弱磁控制算法较为复杂,显著增加了电机的控制难度,因此导致电机的受众面大打折扣。
技术实现思路
1、本申请的目的是提供一种用于电机的转子,该用于电机的转子用于解决现有技术中内嵌式转子必须使用弱磁控制算法进行控制的问题,有助于简化使用了内嵌式转子的电机的控制算法。
2、为了实现上述目的,本申请所提供的技术方案如下:
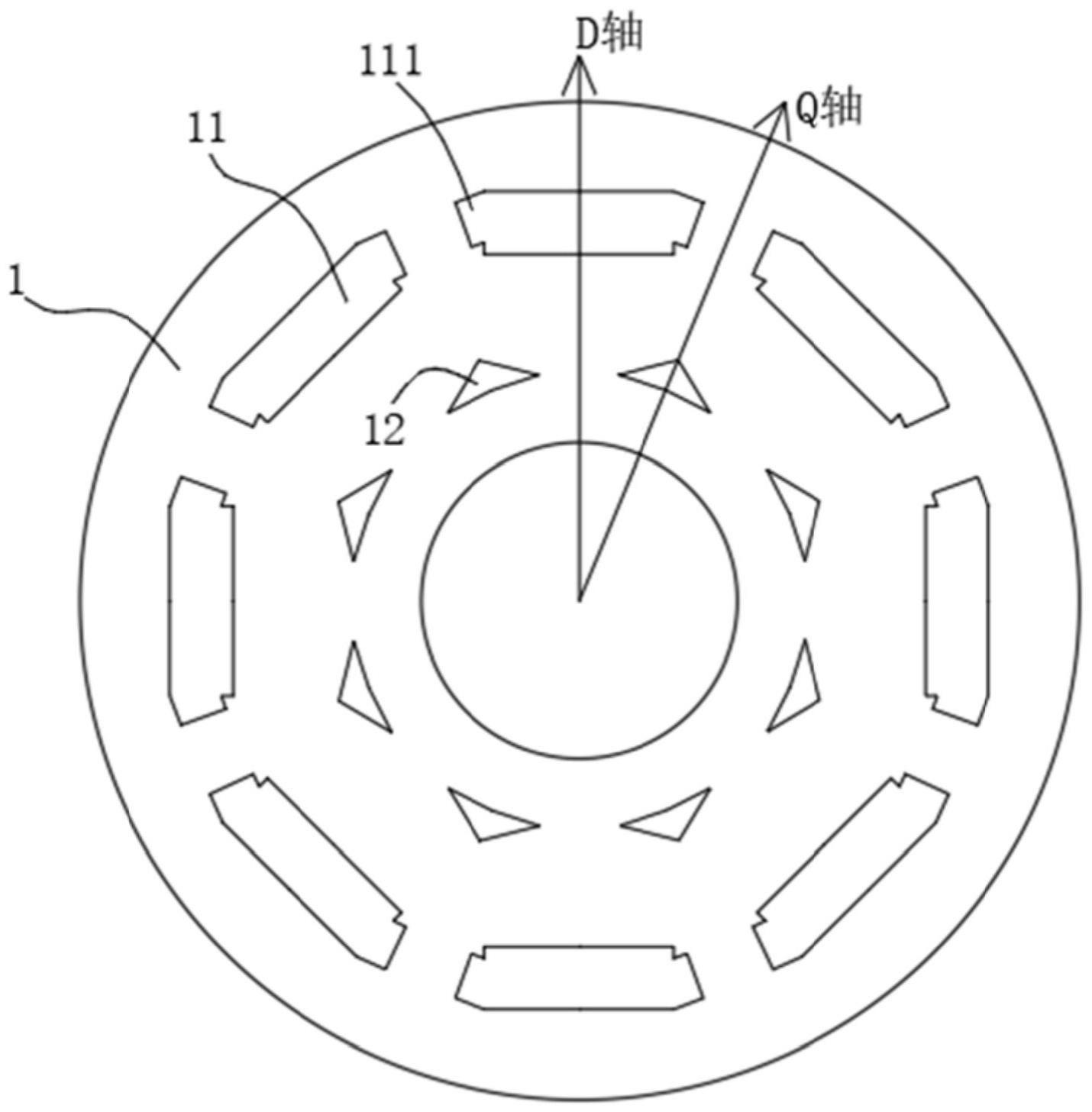
3、本申请提供了一种转子单片的优选实施例,所述转子单片上围绕中心轴线间隔设有多个用于将永磁体内嵌于所述转子单片的第一孔;其中,所述转子单片上还设有第二孔,所述第二孔位于所述转子单片的交轴上。
4、在上述技术方案中,通过在交轴上设置第二孔,有助于增大交轴的磁阻,从而有助于缩小交轴与直轴方向上磁阻之间的差值,进而缩小直轴和交轴两个方向上由于磁阻所附加的磁阻转矩之间的差别,从而简化电机控制难度。
5、并且根据电机相关理论知识可知,v=l*di/dt,其中v指电压,l指磁阻系数,di/dt指电流变化。当电压出现波动,如果具有较大的磁阻系数l,则di/dt的变化较小,即电流波动较小,那么波动所消耗的能耗较小,这就更容易达到磁饱和。本方案中,直轴和交轴方向的磁阻显著增加,从而转子单片电流波动较小,波动所消耗的能耗较小,从而具有更节能的优点。
6、作为一种优选的方案,所述第二孔具有多个,且多个所述第二孔围绕所述中心轴线间隔设置,以使控制算法更加简单。
7、作为一种优选的方案,所述第二孔与所述中心轴线之间的距离小于所述第一孔与所述中心轴线之间的距离,以使第二孔对转子单片旋转时产生的影响足够小。
8、作为一种优选的方案,所述第二孔的宽度在沿所述转子单片的径向朝外的方向上逐渐减小。
9、作为一种优选的方案,所述第二孔呈三角形,进一步缩小第二孔对转子单片旋转时产生的影响。
10、作为一种优选的方案,所述第二孔沿所述转子单片的厚度方向贯穿所述转子单片,以便控制算法进一步简单化。
11、作为一种优选的方案,所述转子单片的直轴方向的磁阻等于所述转子单片的交轴方向的磁阻。
12、本申请还提供了一种转子,包括:层叠设置的多个前述任意方案的转子单片;永磁体,安装于所述第一孔。
13、本申请还提供了一种电机,包括:定子,包括主体以及绕设于所述主体上的线圈;如前所述的转子,所述转子设置于所述定子内。
14、本申请还提供了一种机器人,包括如前所述的电机。
15、本申请的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种转子单片,其特征在于,所述转子单片上围绕中心轴线间隔设有多个用于将永磁体内嵌于所述转子单片的第一孔;
2.如权利要求1所述的转子单片,其特征在于,所述第二孔具有多个,且多个所述第二孔围绕所述中心轴线间隔设置。
3.如权利要求1所述的转子单片,其特征在于,所述第二孔与所述中心轴线之间的距离小于所述第一孔与所述中心轴线之间的距离。
4.如权利要求1所述的转子单片,其特征在于,所述第二孔的宽度在沿所述转子单片的径向朝外的方向上逐渐减小。
5.如权利要求4所述的转子单片,其特征在于,所述第二孔呈三角形。
6.如权利要求1所述的转子单片,其特征在于,所述第二孔沿所述转子单片的厚度方向贯穿所述转子单片。
7.如权利要求1-6任意一项所述的转子单片,其特征在于,所述转子单片的直轴方向的磁阻等于所述转子单片的交轴方向的磁阻。
8.一种转子,其特征在于,包括:
9.一种电机,其特征在于,包括:
10.一种机器人,其特征在于,包括如权利要求9所述的电机。
技术总结
本申请涉及一种转子单片,转子单片上围绕中心轴线间隔设有多个用于将永磁体内嵌于转子单片的第一孔。其中,转子单片上还设有第二孔,第二孔位于转子单片的交轴上。
技术研发人员:许雄,邵威,朱春晓,杨帆,刘博峰
受保护的技术使用者:节卡机器人股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!