间隔棒安装机器人的制作方法
本发明涉及间隔棒安装,尤其涉及一种间隔棒安装机器人。
背景技术:
1、在进行高压导线组架设时,通常会使用到间隔棒,间隔棒用于安装在导线组之间,其主要作用是将多根导线组分开,并限制导线组之间的相对运动,避免了导线组之间的碰撞,从而保证电力的正常传输。
2、传统的间隔棒安装方式,多采用人工走线或人力飞车的方式进行安装,因此需要作业人员高空作业,作业安全风险较大。
3、相关技术中出现了一种间隔棒的安装装置,可以解决解决上述问题,但其在作业过程中,存在间隔棒的安装位置无法准确定位等问题。
技术实现思路
1、本发明提供一种间隔棒安装机器人,用以解决现有的间隔棒的安装装置所存在的缺陷,实现间隔棒的精准定位安装。
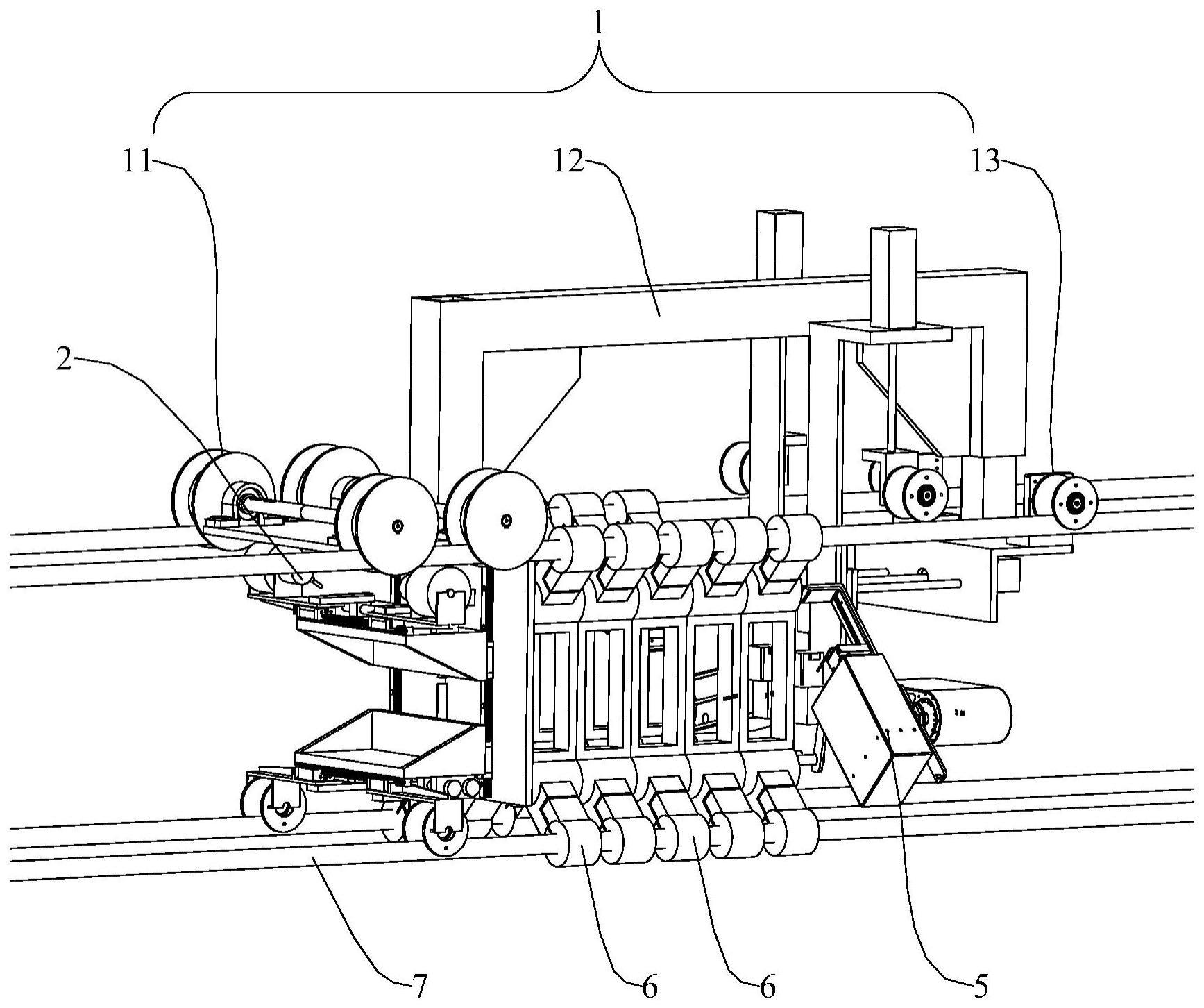
2、本发明提供一种间隔棒安装机器人,包括:行走装置、定位装置、存放装置、移载装置及金具装配装置;所述行走装置用于沿导线组的延伸方向在所述导线组上行走;定位装置设于所述行走装置上,用于计量所述行走装置的行走距离;所述存放装置设于所述行走装置上,所述存放装置用于存放待安装的间隔棒;所述移载装置可移动地设于所述行走装置上,所述移载装置用于将所述存放装置上的间隔棒移载至所述导线组上的安装位;所述金具装配装置可移动地设于所述行走装置上,所述金具装配装置用于将所述安装位上的间隔棒的金具与所述导线组连接。
3、根据本发明提供的一种间隔棒安装机器人,所述行走装置包括:主动组件、支撑架及从动组件,所述主动组件用于沿第一方向在所述导线组上行走,所述主动轮组沿第二方向位于所述导线组的上方;所述支撑架沿所述第二方向位于所述导线组的上方,所述支撑架的一端与所述主动组件连接;所述从动组件沿所述第二方向位于所述导线组的上方,所述从动组件与所述支撑架的另一端连接,所述从动组件能够沿第二方向升降;其中,所述第一方向为所述导线组的延伸方向,所述第二方向与所述第一方向垂直。
4、根据本发明提供的一种间隔棒安装机器人,所述从动组件包括相独立的第一从动轮组和第二从动轮组;所述第一从动轮组和所述第二从动轮组沿第三方向间隔设置,所述第一从动轮组和所述第二从动轮组均能够沿所述第二方向升降。
5、根据本发明提供的一种间隔棒安装机器人,所述行走装置还包括:定位组件,所述定位组件与所述支撑架的一端连接;所述定位组件包括第一夹紧轮组和第二夹紧轮组,所述第一夹紧轮组和所述第二夹紧轮组沿所述第二方向上、下设置,所述第一夹紧轮组和所述第二夹紧轮组能够沿所述第二方向相靠近或相远离;所述第一夹紧轮组和所述第二夹紧轮组均包括第三轮部和第四轮部,所述第三轮部和所述第四轮部沿第三方向左、右设置,所述第三轮部和所述第四轮部能够沿所述第三方向相靠近或相远离;其中,所述第三方向分别与所述第一方向、所述第二方向垂直。
6、根据本发明提供的一种间隔棒安装机器人,所述行走装置还包括安装部,所述安装部与所述支撑架的一端连接,所述安装部沿所述第二方向设置,所述第一夹紧轮组和所述第二夹紧轮组沿所述第二方向可移动地设置于所述安装板。
7、根据本发明提供的一种间隔棒安装机器人,所述存放装置包括至少两个相平行的导向杆,所述导向杆沿所述第二方向位于所述导线组之间,所述导向杆沿所述第一方向延伸;所述导向杆的一端与所述安装部连接,所述间隔棒穿设于所述导向杆。
8、根据本发明提供的一种间隔棒安装机器人,所述移载装置包括升降组件与钩板组件;所述升降组件的固定端与所述支撑架连接,所述升降组件的伸缩端与所述钩板组件的一端转动连接;所述钩板组件包括第一钩板和第二钩板,所述第一钩板和所述第二钩板的另一端部设置有凹口,所述第一钩板和所述第二钩板的所述凹口相对设置,所述凹口适于与所述导向杆的另一端部连接或分离;在所述升降组件靠近所述导向杆的情况下,所述凹口与所述导向杆的另一端部分离;在所述升降组件远离所述导向杆的情况下,所述凹口与所述导向杆的另一端部连接。
9、根据本发明提供的一种间隔棒安装机器人,所述金具装配装置包括金具闭合机构;所述金具闭合机构包括闭合夹具与第一驱动件,所述闭合夹具包括第一夹持模与第二夹持模,所述第一夹持模与所述第二夹持模相对设置,所述移载装置用于将间隔棒的金具移载至所述第一夹持模与所述第二夹持模之间,所述第一驱动件用于驱动所述第一夹持模与所述第二夹持模相靠近以闭合所述金具,在所述金具闭合的情况下,所述金具用于夹持所述导线组。
10、根据本发明提供的一种间隔棒安装机器人,所述金具装配装置还包括第二驱动件;所述金具闭合机构通过所述第二驱动件可移动地设于所述行走装置上,所述第二驱动件能够驱动所述金具闭合机构沿所述第一方向上、下移动。
11、根据本发明提供的一种间隔棒安装机器人,所述第一夹持模与所述第二夹持模所形成的夹持口的朝向与所述行走装置的行走方向相反,所述安装位形成于所述夹持口;在所述行走装置沿第一方向行走的情况下,所述夹持口朝向第二方向;所述移载装置用于将间隔棒沿所述第二方向移载至待安装位,所述待安装位沿所述第一方向位于所述安装位的后侧,所述移载装置还用于将所述待安装位的间隔棒沿所述第一方向移载至所述夹持口内。
12、本发明提供的间隔棒安装机器人,通过间隔棒安装机器人实现间隔棒的自动化安装,以代替人工作业,减轻作业人员劳动强度的同时降低了人工作业的安全风险;定位装置设于所述行走装置上,可以计量行走装置的行走距离,以精确确定安装棒的安装位,当行走装置移动至导线组上需要安装间隔棒的位置时,移载装置将存放装置上的间隔棒取出并移动至导线组上的安装位,以使得间隔棒四角的固定扣搭接在导线组上,金具装配装置开启并推动活动扣朝向固定扣的一侧转动,以通过固定扣与活动扣的扣合夹持导线组,从而将间隔棒安装在导线组上,通过间隔棒的自动化安装,无需通过人工作业的方式安装间隔棒,既能实现间隔棒在安装位的精准安装,又减轻了作业人员的劳动强度,降低了人工作业的安全风险。
技术特征:
1.一种间隔棒安装机器人,其特征在于,包括:
2.根据权利要求1所述的间隔棒安装机器人,其特征在于,所述行走装置包括:
3.根据权利要求2所述的间隔棒安装机器人,其特征在于,
4.根据权利要求3所述的间隔棒安装机器人,其特征在于,
5.根据权利要求4所述的间隔棒安装机器人,其特征在于,
6.根据权利要求5所述的间隔棒安装机器人,其特征在于,
7.根据权利要求6所述的间隔棒安装机器人,其特征在于,
8.根据权利要求2至7任一项所述的间隔棒安装机器人,其特征在于,所述金具装配装置包括金具闭合机构;
9.根据权利要求8所述的间隔棒安装机器人,其特征在于,
10.根据权利要求8所述的间隔棒安装机器人,其特征在于,
技术总结
本发明提供一种间隔棒安装机器人,包括:行走装置、定位装置、存放装置、移载装置及金具装配装置;所述行走装置用于沿导线组的延伸方向在所述导线组上行走;定位装置设于所述行走装置上,用于计量所述行走装置的行走距离;所述存放装置设于所述行走装置上;所述移载装置可移动地设于所述行走装置上,所述移载装置用于将所述存放装置上的间隔棒移载至所述导线组上的安装位;所述金具装配装置可移动地设于所述行走装置上,所述金具装配装置用于将所述安装位上的间隔棒的金具与所述导线组连接。本发明通过间隔棒安装机器人实现间隔棒的精准的自动化安装,以代替人工作业,减轻作业人员劳动强度的同时降低了人工作业的安全风险。
技术研发人员:张贝,彭苗,毕俊,吴攀,郑涛,李嘉,赵敏,董先军,熊兰
受保护的技术使用者:武汉楚前电力技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!