无位置传感器永磁电机、其起动控制方法和可读存储介质与流程
本发明涉及电机控制领域,更具体地,本发明主要涉及一种无位置传感器永磁电机的起动控制方法。
背景技术:
1、永磁电机被广泛地应用于无人机、电动汽车和变频压缩机等领域,其控制方式包括:有位置传感器控制和无位置传感器控制。在有位置传感器控制中,基于位置传感器的信号对电机进行控制,然而位置传感器的探测精度有限,并且位置传感器增加了电机的成本且存在失效风险。
2、在无位置传感器控制中,高频注入法是一种常见的获取电机转子位置的方法,例如在中国专利公开号cn113497530b和cn113489277a中均有描述。高频注入法主要通过施加已知的高频电压信号,并通过对高频感应电流进行分析处理来获得转子位置信息,由此实时监测电机转子的角度位置和转速等。然而,高频注入法所识别的转子位置信息可能存在180度的偏差,即极性不能确定,因此在电机起动前需要执行极性检测步骤。在cn113497530b和cn1 13489277a中,极性检测步骤通过施加两个相位相差180度的电压脉冲来实现,该方法需要单独设计方案逻辑,代码相对复杂。
技术实现思路
1、本申请的目的在于解决或至少缓解现有技术中所存在的问题。
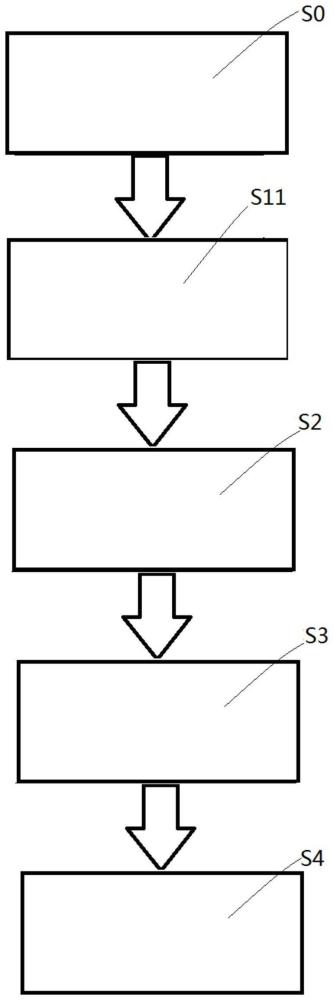
2、根据一方面,本发明提供了一种无位置传感器永磁电机的起动控制方法,所述方法包括;
3、s11使电机转子定位至第一角度位置,并且记录所述第一角度位置;
4、s2在电机转子稳定后,将通过高频注入法获取的电机转子的角度位置记录为第二角度位置;
5、s3判断所述第一角度位置和所述第二角度位置之差是否落入预定范围,并且基于判断结果和所述第二角度位置确定起动电机时所述电机转子的初始角度;以及s4起动电机。
6、可选地,在所述起动控制方法的实施例中,在所述步骤s3中,当所述第一角度位置和所述第二角度位置之差落入所述预定范围之内,则以所述第二角度位置作为初始角度,当所述第一角度位置和所述第二角度位置之差在所述预定范围之外,则以所述第二角度位置修正180度作为初始角度。
7、可选地,在所述起动控制方法的实施例中,所述预定范围为±60°,可选地,所述预定范围为±45°。
8、可选地,在所述起动控制方法的实施例中,所述步骤s11进一步包括利用磁定位法对所述转子进行初始定位。
9、可选地,在所述起动控制方法的实施例中,所述磁定位法包括施加电流矢量,并且通过所述电流矢量产生的磁场将转子吸引至所述第一角度位置。
10、可选地,在所述起动控制方法的实施例中,所述起动控制方法进一步包括:s12在电机转子稳定前使用高频注入法实时地监测电机转子的角度位置。
11、可选地,在所述起动控制方法的实施例中,所述步骤s11先于所述步骤s12执行,或者所述步骤s11与所述步骤s12同时执行。
12、可选地,在所述起动控制方法的实施例中,在所述步骤s2中,在使用高频注入法实时地监测到的电机转子的角度位置的变化率小于预定值或者在所述步骤s11执行超过预定时间后判定所述电机转子稳定。
13、根据另一方面,提供了一种可读存储介质,所述可读存储介质中存储有计算机程序,该计算机程序在被执行时根据本发明的实施例所述的方法。
14、根据另一方面,提供了一种无位置传感器永磁电机,尤其是用于车载压缩机的无位置传感器永磁电机,其包括:转子,定子,磁定位模块和高频注入模块以及控制器,所述控制器在起动所述无位置传感器永磁电机时执行如下步骤:
15、s1利用所述磁定位模块使电机转子定位至第一角度位置,并且记录所述第一角度位置,起动所述高频注入模块实时地监测电机转子的角度位置;
16、s2在电机转子稳定后,将所述高频注入模块探测的电机转子的角度位置记录为第二角度位置;
17、s3判断所述第一角度位置和所述第二角度位置之差是否落入预定范围,并且基于判断结果和所述第二角度位置确定起动电机时所述电机转子的初始角度;以及s4起动电机。
18、根据本发明的装置和方法能够在电机起动时更容易地确定电机转子位置。
技术特征:
1.一种无位置传感器永磁电机的起动控制方法,所述方法包括;
2.根据权利要求1所述的起动控制方法,其特征在于,在所述步骤s3中,当所述第一角度位置和所述第二角度位置之差落入所述预定范围之内,则以所述第二角度位置作为初始角度,当所述第一角度位置和所述第二角度位置之差在所述预定范围之外,则以所述第二角度位置修正180度作为初始角度。
3.根据权利要求2所述的起动控制方法,其特征在于,所述预定范围为±60°,可选地,所述预定范围为±45°。
4.根据权利要求1所述的起动控制方法,其特征在于,所述步骤s11进一步包括利用磁定位法对所述转子进行初始定位。
5.根据权利要求4所述的起动控制方法,其特征在于,所述磁定位法包括施加电流矢量,并且通过所述电流矢量产生的磁场将转子吸引至所述第一角度位置。
6.根据权利要求1所述的起动控制方法,其特征在于,所述起动控制方法进一步包括:s12在电机转子稳定前使用高频注入法实时地监测电机转子的角度位置。
7.根据权利要求6所述的起动控制方法,其特征在于,所述步骤s11先于所述步骤s12执行,或者所述步骤s11与所述步骤s12同时执行。
8.根据权利要求6所述的起动控制方法,其特征在于,在所述步骤s2中,在使用高频注入法实时地监测到的电机转子的角度位置的变化率小于预定值或者在所述步骤s11执行超过预定时间后判定所述电机转子稳定。
9.一种可读存储介质,其特征在于,所述可读存储介质中存储有计算机程序,该计算机程序在被执行时执行如权利要求1-8中任一项所述的方法。
10.一种无位置传感器永磁电机,尤其是用于车载压缩机的无位置传感器永磁电机,其包括:转子,定子,磁定位模块和高频注入模块以及控制器,所述控制器在起动所述无位置传感器永磁电机时执行如下步骤:
技术总结
本发明提供了一种无位置传感器永磁电机、其起动控制方法和可读存储介质。一种无位置传感器永磁电机的起动控制方法,所述方法包括;S11使电机转子定位至第一角度位置,并且记录所述第一角度位置;S2在电机转子稳定后,将通过高频注入法获取的电机转子的角度位置记录为第二角度位置;S3判断所述第一角度位置和所述第二角度位置之差是否落入预定范围,并且基于判断结果和所述第二角度位置确定起动电机时所述电机转子的初始角度;以及S4起动电机。根据本发明的装置和方法能够在电机起动时更容易地确定电机转子位置。
技术研发人员:杨凯旋,胡敬伟,王俊,赵浩
受保护的技术使用者:罗伯特·博世有限公司
技术研发日:
技术公布日:2024/10/21
- 还没有人留言评论。精彩留言会获得点赞!