一种分布式光伏清洗机器人的制作方法
本发明涉及光伏板清洗机器人,具体涉及一种分布式光伏清洗机器人。
背景技术:
1、光伏组件长时间置于空气中,空气中的尘埃会大量覆盖在光伏组件表面,减少光照吸收,减少发电量,并且还会阻止热量向外传递,温度严重过高时光伏组件表面会出现烧坏的热斑;分布式场景的特殊性:分布式光伏,通常为彩钢瓦屋顶或水泥屋顶,因电量消纳快,尤其需要注重运维,保障/提升发电量;又由于分布式屋顶人工清洗,具有坠落、误踩、清洁效率低等问题,现在普遍采用机器人自动化清洗;
2、目前市面的分布式光伏清洗机器人普遍采用履带式或者吸盘式,一方面机器人本身依靠与光伏板的摩擦行走,灰尘多,摩擦附着力本身就有影响;其次,机器人本体直接在光伏板行走,尤其在跨越板面时,因板面与边框高差产生的动负载,使光伏板发生板裂的风险急剧增加;而且,为保证本体不至于过重,其毛刷尺寸相对受限,因此清扫效率普遍偏低;再者,机器人需要定位算法、自主规划路径,研发技术复杂,技术使用稳定性低,因此亟需一种分布式光伏清洗机器人来解决上述问题。
技术实现思路
1、本发明的目的是提供一种分布式光伏清洗机器人,以解决现有技术中的上述不足之处。
2、为了实现上述目的,本发明提供如下技术方案:
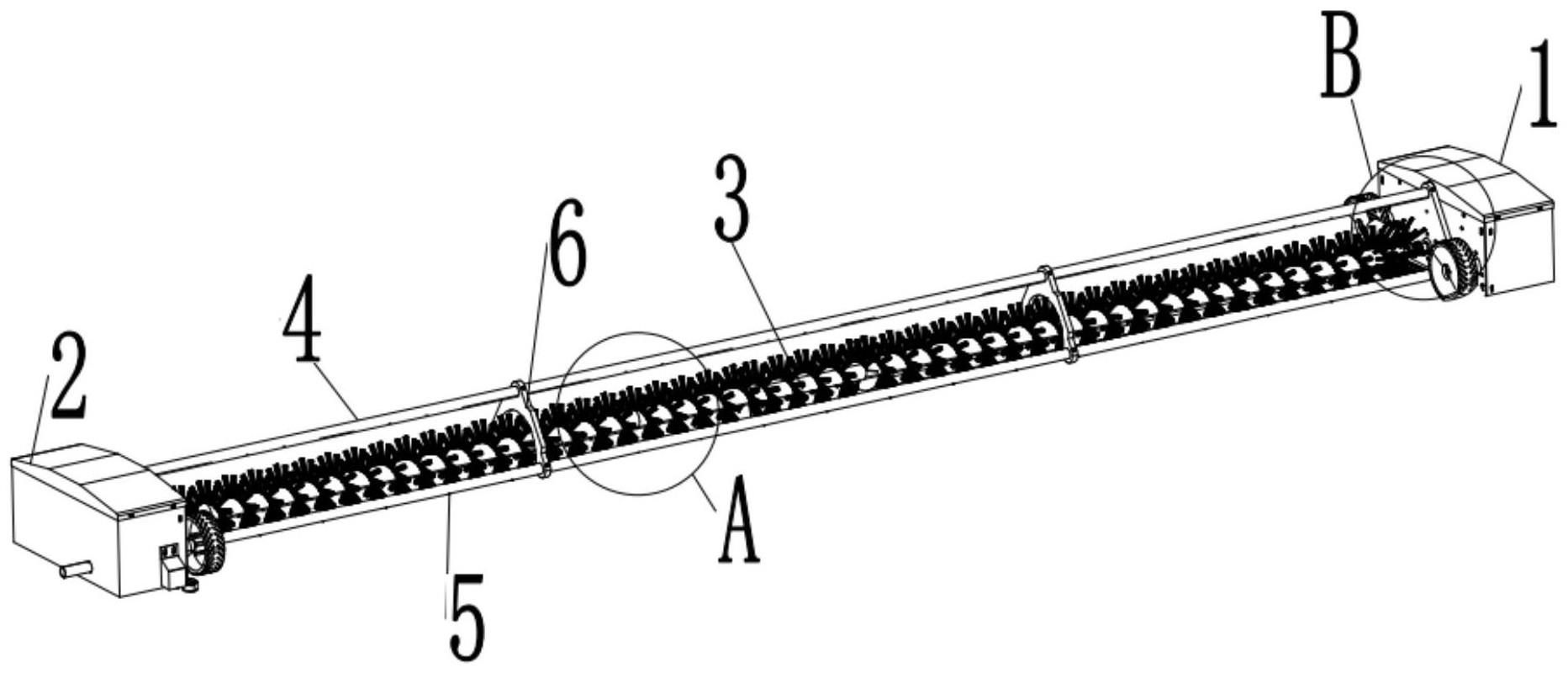
3、一种分布式光伏清洗机器人,包括上驱动箱体和下驱动箱体,所述上驱动箱体和下驱动箱体的内部均设置有驱动组件,所述上驱动箱体和下驱动箱体之间设置有快装连接组件和清扫滚刷组件,所述清扫滚刷组件位于快装组件的下方,且清扫滚刷组件与驱动组件连接,驱动组件转动带动清扫滚刷组件转动清洗光伏板。
4、本发明提供的再一个实施中,所述快装连接组件包括加强锁板和两个端部锁板,两个所述端部锁板分别设置在上驱动箱体和下驱动箱体相视的一侧。
5、本发明提供的再一个实施中,所述快装组件包括快装连接管一、快装连接管二和快装连接管三,所述加强锁板开设有插接孔,所述快装连接管插接在插接孔的内部,紧定螺钉固定。
6、本发明提供的再一个实施中,所述快装连接管三,一端贯穿上驱动箱体并延伸至上驱动箱体的外侧,末端带有高压喷水枪,具备增压喷水功能,另一端与下驱动箱体一侧的端部锁板连接。
7、本发明提供的再一个实施中,所述驱动组件包括驱动电机,所述驱动电机输出轴的一端设置有主动轮,所述主动轮与清扫滚刷连接。
8、本发明提供的再一个实施中,所述清扫滚刷包括毛刷轴,所述毛刷轴的外部螺旋状设置有尼龙毛丝。
9、本发明提供的再一个实施中,所述上驱动箱体和下驱动箱体的一侧内壁均转动设置有从动轮,所述从动轮连接有行走轮。
10、本发明提供的再一个实施中,所述上驱动箱体和下驱动箱体的一侧内壁均设置有第一涨紧轮和第二涨紧轮,所述主动轮、从动轮、第一涨紧轮和第二涨紧轮缠结有同步带。
11、本发明提供的再一个实施中,上驱动箱体的内部设置有移动快换电池,所述电池位于电机的一侧位置。
12、在上述技术方案中,本发明提供的一种分布式光伏清洗机器人,
13、1、采用铝边框切边行走驱动,行走稳定,无惧多尘打滑,并且保障对光伏板板面0压损;
14、2、可根据光伏板规格定制毛刷长度,无毛刷尺寸及重量限制性,清扫效率可成倍提高;
15、3、整机切边框直线行走,采用传统电感或光电开关,即可实现设备的行走感应和判断,技术稳定、使用成本低;
16、4、整机采用模块化设计,快拆快装,搬运、维护简单,有些分布式垂直爬钢梯上屋顶的,搬运比较方便,不需要吊装。
技术特征:
1.一种分布式光伏清洗机器人,其特征在于,包括上驱动箱体(2)和下驱动箱体(1),所述上驱动箱体(2)和下驱动箱体(1)的内部均设置有驱动组件,所述上驱动箱体(2)和下驱动箱体(1)之间设置有快装连接组件和清扫滚刷组件(3),所述清扫滚刷组件(3)位于快装组件的下方,且清扫滚刷组件与驱动组件连接,驱动组件转动带动清扫滚刷组件转动清洗光伏板。
2.根据权利要求1所述的一种分布式光伏清洗机器人,其特征在于,所述快装连接组件包括加强锁板(14)和两个端部锁板(10),两个所述端部锁板(10)分别设置在上驱动箱体(2)和下驱动箱体(1)相视的一侧。
3.根据权利要求1所述的一种分布式光伏清洗机器人,其特征在于,所述快装连接组件包括快装连接管一(4)、快装连接管二(7)和快装连接管三(5),所述加强锁板14开设有插接孔(15),所述快装连接管一(4)、快装连接管二(7)和快装连接管三(5)插接在插接孔(15)的内部,再通过加强锁板上的紧定螺钉快锁固定。
4.根据权利要求3所述的一种分布式光伏清洗机器人,其特征在于,所述快装连接管三(5),一端贯穿上驱动箱体(2)并延伸至上驱动箱体(2)的外侧,端部带有高压喷水枪,具备增压喷水功能,所述快装连接管三(5)的另一端与下驱动箱体(1)一侧的端部锁板(10)连接。
5.根据权利要求1所述的一种分布式光伏清洗机器人,其特征在于,所述驱动组件包括驱动电机(8),所述驱动电机(8)输出轴的一端设置有主动轮(17),所述主动轮(17)与清扫滚刷组件连接。
6.根据权利要求1所述的一种分布式光伏清洗机器人,其特征在于,所述清扫滚刷组件(6)为螺旋式毛刷,包括毛刷轴(12),所述毛刷轴(12)的外部设置有尼龙毛丝(13),尼龙毛丝沿毛刷轴外周螺旋式分布。
7.根据权利要求1所述的一种分布式光伏清洗机器人,其特征在于,所述上驱动箱体(2)和下驱动箱体(1)的一侧内壁均转动设置有从动轮(18),所述从动轮(18)连接有行走轮(11)。
8.根据权利要求7所述的一种分布式光伏清洗机器人,其特征在于,所述上驱动箱体(1)和下驱动箱体(2)的一侧内壁均设置有第一涨紧轮(16)和第二涨紧轮(19),所述主动轮(17)、从动轮(18)、第一涨紧轮(16)和第二涨紧轮(19)缠结有同步带(20)。
9.根据权利要求1所述的一种分布式光伏清洗机器人,其特征在于,上驱动箱体(2)内部设置有移动快换电池(21),所述备用电池(21)位于电机的一侧位置。
技术总结
本发明公开了一种分布式光伏清洗机器人,包括上驱动箱体和下驱动箱体,所述上驱动箱体和下驱动箱体的内部均设置有驱动组件,所述上驱动箱体和下驱动箱体之间设置有快装连接组件和清扫滚刷组件,所述清扫滚刷组件位于快装连接组件的下方,且快装连接组件和清扫滚刷组件与驱动组件连接整机采用模块化设计,快拆快装,搬运、维护简单,有些分布式垂直爬钢梯上屋顶的,搬运比较方便,不需要吊装。
技术研发人员:袁燕,黄令
受保护的技术使用者:袁燕
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!