一种基于北方苍鹰算法的光伏并网三相逆变器控制方法与流程
本发明属于电力电子,具体涉及一种基于北方苍鹰算法的光伏并网三相逆变器控制方法。
背景技术:
1、新能源发电需求飞速增加,逆变器市场需求急速增长,智能领域的发展推动逆变器朝着更高效率的方向优化。对于逆变器来说,控制环节的控制参数紧密影响着输出波形,波形的好坏展示着输出的电能质量的好坏。其输出电流为更好地跟随电网相位、满足并网需求,需严格遵循注入电网电流thd要求。群体智能算法对于逆变控制环节的应用表现出良好作用,但并不是所有群体智能算法均适合于所研究的光伏系统。北方苍鹰算法具有强大的全局搜索能力和局部搜索能力,对于多目标决策问题具有良好的表现。由此,使用合适的算法应用于逆变器控制环节来保证并网电流谐波含量较小,得到高质量输出电能是本领域技术人员关心的问题。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种基于北方苍鹰算法的光伏并网三相逆变器控制方法。
2、具体技术方案如下:
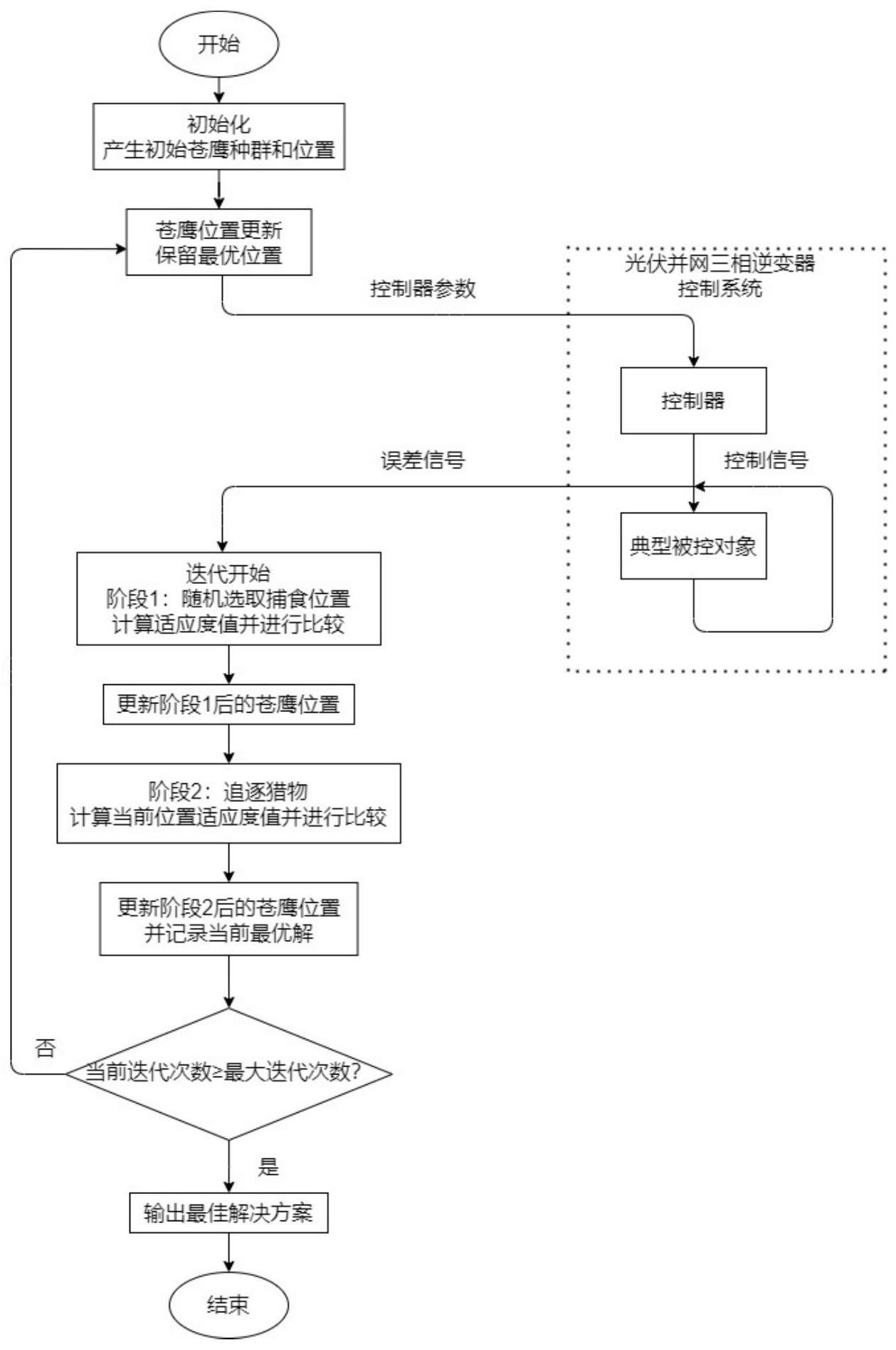
3、一种基于北方苍鹰算法的光伏并网三相逆变器控制方法,包括如下步骤:
4、s1:初始化苍鹰种群和位置,随机生成n个苍鹰种群的初始位置其中为第i只苍鹰所在的初始位置,设置问题求解维数d和最大迭代次数m;
5、s2:设计北方苍鹰算法的最佳位置和适应度值的计算方法,利用北方苍鹰算法的两个阶段对苍鹰位置和状态进行更新;
6、s3:建立光伏并网三相逆变器控制结构模型,所述模型中逆变器控制结构选择功率-电流双闭环控制结构,该部分均采用基于pi控制的双闭环控制结构;
7、s4:根据s2求得的最优解,将其传递给光伏并网三相逆变器整定模型。
8、进一步地,步骤s2的具体过程包括如下步骤:
9、s21:由初始位置p0确定最佳种群位置和最佳适应度值fmin;
10、s22:第一阶段随机选择一只苍鹰进行搜寻,第二阶段更新种群位置和适应度值,利用第一阶段得到一组新的苍鹰位置其中为第一阶段第i只苍鹰产生的新位置,将新的苍鹰位置与上一组产生的苍鹰位置进行对比,其中为上一组第i只苍鹰的位置,用适应度值较好的苍鹰位置替换适应度较差的苍鹰位置,得到一组较优的苍鹰位置记录为当前最优解,其中为第i只苍鹰较优的位置;
11、s23:判断是否满足终止条件,若算法迭代次数达到最大迭代次数m,则算法结束,输出当前最优解,否则转到步骤s22继续进行迭代。
12、进一步地,步骤s21中北方苍鹰的初始种群位置矩阵的数学表达式为:
13、
14、式中,x为北方苍鹰种群的位置,xi为第i个苍鹰的位置即问题的解,xi,j为第i个解指定的第j个变量的值;
15、适应度值矩阵的数学表达式为:
16、
17、式中,f为获得的适应度值的向量,fi为第i个解对应的适应度值。
18、进一步地,步骤s22中所指的第一阶段为猎物识别阶段,包括猎物选择和攻击,随机选择一个猎物,然后迅速攻击它,由于在搜索空间中随机选择猎物,该阶段增加了全局搜索能力,以识别最佳区域,该阶段的数学表达式如下:
19、pi=xk,(i=1,2,...,n,k=1,2,...i-1,i,i+1,...,n)
20、
21、
22、式中,pi为第i只北方苍鹰的猎物位置,fpi为其适应度函数值,k为区间(1,n)中随机自然数,为第一阶段产生的新解,为第一阶段的适应度函数值,r为区间(0,1)中的随机数,i为1或2的随机数,r和i用于搜索和更新产生随机苍鹰行为;
23、第二阶段为追逐阶段,北方苍鹰攻击猎物后,猎物试图逃跑,北方苍鹰在该阶段继续追逐猎物,北方苍鹰凭借高速度,能在任何情况下追逐猎物,并最终狩猎,对这种行为的模拟增加了算法对搜索空间的局部搜索的开发能力,该阶段的数学表达式为:
24、
25、
26、
27、式中,t为当前迭代次数,r为苍鹰狩猎时靠近攻击位置的半径,为第二阶段产生的新解,为第二阶段的适应度函数值。
28、进一步地,步骤s3中所述的pi控制由比例调节和积分调节两部分组合而成,比例调节主要是根据偏差的大小成比例的调节输出,积分调节主要根据偏差进行积分累计来调节输出,直至消除稳态误差,pi控制器的输出关系表达式为:
29、u(t)=kpe(t)+ki∫e(t)dt
30、式中,u(t)为pi控制器的输出量,kp和ki为pi控制器的比例调节参数和积分调节参数,偏差信号e(t)为pi控制器的输入量;
31、pi控制器的传递函数表达式为:
32、
33、式中,s为复变量。
34、进一步地,步骤s3采用均匀加权法,将数据量化,解决多目标决策,当逆变器采用pi控制时,将三相abc静止坐标系下的交流量进行park变换到两相dq同步旋转坐标系下,此时两相dq静止坐标系下控制量为直流,分别选取双闭环中功率环和电流环对应电流的itae,加权之后作为逆变器控制参数整定的目标函数,itae的表达式为:
35、
36、式中,t为系统时间,|e(t)|为误差绝对值;
37、总谐波畸变表达式为:
38、
39、式中,vhn为n次谐波,vho1为基波有效值,总谐波畸变率thd越小交流量谐波含量越低,总谐波失真越小。
40、进一步地,对于pi控制器参数整定,分别选取双闭环中功率和电流环对应电流的itae,加权之后作为参考整定的目标函数,则目标函数公式为:
41、
42、式中,a、b为权重系数,均为常数,并满足a+b=1,e1(t)、e2(t)分别为功率外环和电流内环输入pi控制器的误差。
43、本发明的有益效果在于:
44、基于北方苍鹰算法的pi控制参数整定方法,并将其运用到光伏并网三相逆变器参数整定模型上,极大地利用了算法的全局搜索能力、准确性和效率,保证了收敛速度,提升了光伏系统鲁棒性和功率因数,这对光伏并网三相逆变器控制参数整定工程应用具有重大意义。
技术特征:
1.一种基于北方苍鹰算法的光伏并网三相逆变器控制方法,其特征在于包括如下步骤:
2.根据权利要求1所述的一种基于北方苍鹰算法的光伏并网三相逆变器控制方法,其特征在于步骤s2的具体过程包括如下步骤:
3.根据权利要求2所述的一种基于北方苍鹰算法的光伏并网三相逆变器控制方法,其特征在于步骤s21中北方苍鹰的初始种群位置矩阵的数学表达式为:
4.根据权利要求3所述的一种基于北方苍鹰算法的光伏并网三相逆变器控制方法,其特征在于步骤s22中所指的第一阶段为猎物识别阶段,包括猎物选择和攻击,随机选择一个猎物,然后迅速攻击它,由于在搜索空间中随机选择猎物,该阶段增加了全局搜索能力,以识别最佳区域,该阶段的数学表达式如下:
5.根据权利要求1到4任一所述的一种基于北方苍鹰算法的光伏并网三相逆变器控制方法,其特征在于步骤s3中所述的pi控制由比例调节和积分调节两部分组合而成,比例调节主要是根据偏差的大小成比例的调节输出,积分调节主要根据偏差进行积分累计来调节输出,直至消除稳态误差,pi控制器的输出关系表达式为:
6.根据权利要求5所述的一种基于北方苍鹰算法的光伏并网三相逆变器控制方法,其特征在于步骤s3采用均匀加权法,将数据量化,解决多目标决策,当逆变器采用pi控制时,将三相abc静止坐标系下的交流量进行park变换到两相dq同步旋转坐标系下,此时两相dq静止坐标系下控制量为直流,分别选取双闭环中功率环和电流环对应电流的itae,加权之后作为逆变器控制参数整定的目标函数,itae的表达式为:
7.根据权利要求6所述的一种基于北方苍鹰算法的光伏并网三相逆变器控制方法,其特征在于对于pi控制器参数整定,分别选取双闭环中功率和电流环对应电流的itae,加权之后作为参考整定的目标函数,则目标函数公式为:
技术总结
本发明公开了一种基于北方苍鹰算法的光伏并网三相逆变器控制方法,包括以下步骤:S1:初始化种群和苍鹰位置;S2:设计北方苍鹰算法的最佳位置和适应度值的计算方法;S3:建立光伏并网三相逆变器控制结构模型;S4:根据S2求得的最优解,将其传递给光伏并网三相逆变器整定模型。本发明提出一种基于北方苍鹰算法的PI控制参数整定方法,并将其运用到光伏并网三相逆变器参数整定模型上,极大地利用了算法的全局搜索能力、准确性和效率,保证了收敛速度,提升了光伏系统鲁棒性和功率因数,这对光伏并网三相逆变器控制参数整定工程应用具有重大意义。
技术研发人员:韩欣朔,严文生,曾子斌,谢光淋,马胜杰,张震,颜刚强,康慧丽
受保护的技术使用者:浙江科鼐尔机电制造有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!