一种基于电流状态估计的PMSM无参数预测控制方法
本发明涉及一种基于电流状态估计的pmsm无参数预测控制方法,应用于属于电机驱动及控制领域。
背景技术:
1、在电动汽车电机驱动的各种类型中,永磁同步电机(pmsm)因其效率高、结构简单和控制性能持久而成为发展最快的电机之一。就其控制而言,与传统矢量控制、直接转矩控制相比,模型预测电流控制(mpcc)具有响应速度快、多目标优化、原理简单等突出优点。一般来说,经典mpcc直接通过最小化代价函数来跟踪电流参考值以选择最优输出。但是,它的跟踪精度主要取决于精确的电机参数,包括定子电阻、dq轴电感和永磁体磁链。因此,基于模型的方案具有有限的参数鲁棒性。由于参数的不确定性和干扰,控制性能下降是不可避免的。
2、为了克服电机参数的不确定性,发展了一种无模型预测电流控制。传统的无模型预测电流控制采用电流差查找表来存储与8个基电压矢量中的每一个相关的电流变化,再将该信息用于未来电流值预测,输入价值函数求取最佳应用电压矢量。但传统方法存在一个停滞问题,即因为如果一个电压矢量没有应用许多连续的采样周期,存储的相关电流变化的信息就会得不到更新,从而严重影响未来电流的预测结果,影响控制性能。
技术实现思路
1、发明目的:针对上述现有技术,提出一种基于电流状态估计的pmsm无参数预测控制方法,克服现有的基于查找表的无参数预测电流控制技术存在停滞的缺陷。
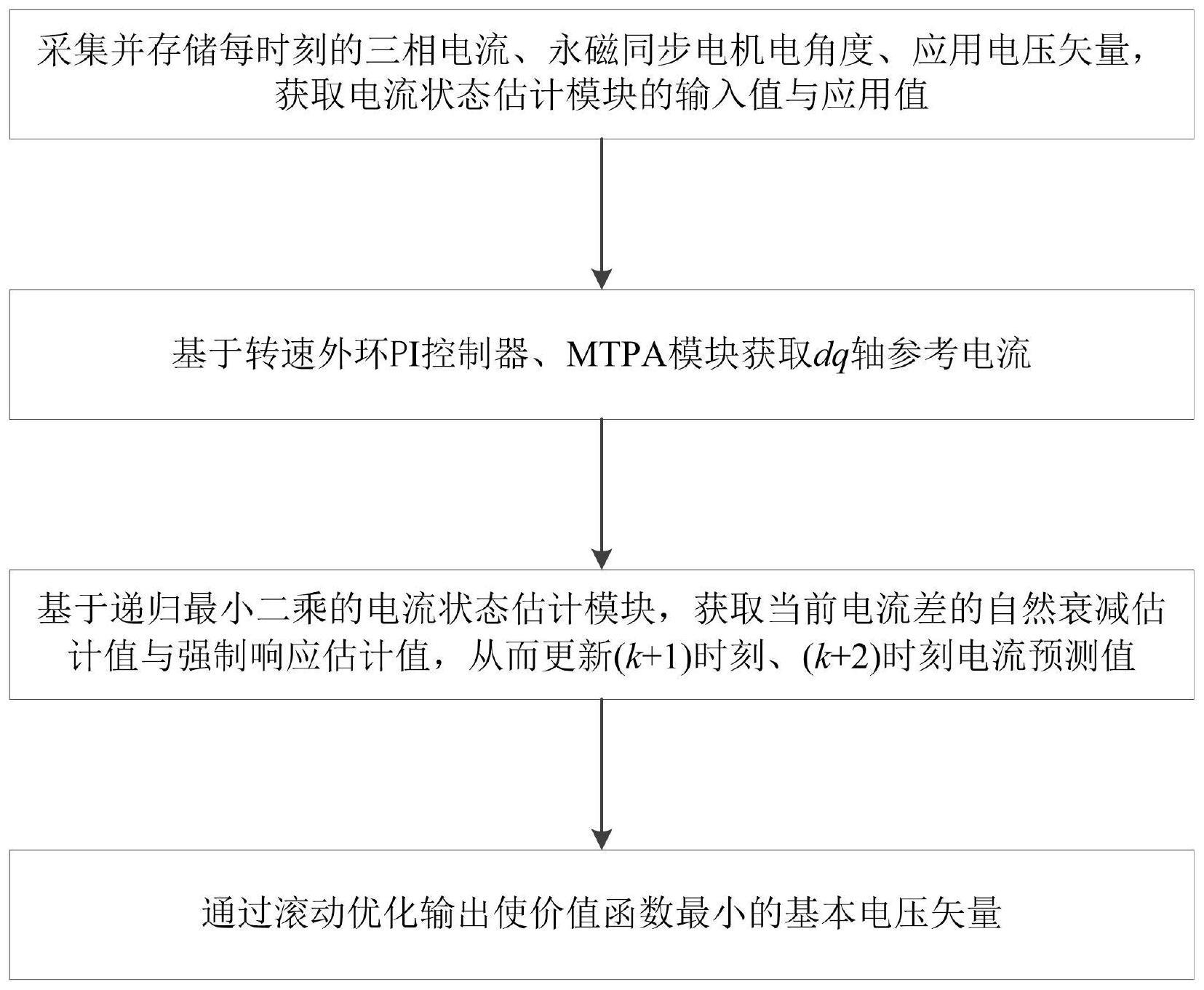
2、技术方案:一种基于电流状态估计的pmsm无参数预测控制方法,包括如下步骤:
3、步骤s1:采集并存储每时刻的三相电流、永磁同步电机电角度、应用电压矢量,获取电流状态估计模块的输入值与应用值yx,其中x=d,q;
4、步骤s2:基于转速外环pi控制器获取q轴参考电流iqref(k+2),并通过mtpa模块获取d轴参考电流idref(k+2);
5、步骤s3:基于递归最小二乘的电流状态估计模块,获取当前电流差的自然衰减估计值与强制响应估计值,从而更新(k+1)时刻、(k+2)时刻的电流预测值;
6、步骤s4:通过滚动优化,输出使价值函数g最小的基本电压矢量;其中id(k+2)为(k+2)时刻d轴电流预测值,iq(k+2)为(k+2)时刻q轴电流预测值。
7、进一步的,所述步骤s1中包括如下具体步骤:定义八个电压矢量对应开关状态为v1(0,0,1),v2(0,1,0),v3(0,1,1),v4(1,0,0),v5(1,0,1),v6(1,1,0),v7(0,0,0),v8(1,1,1),采集并存储每时刻的应用电压矢量vn,并判断出与(k-1)时刻开始处施加的电压矢量不同的电压矢量开始的时刻,即(k-m)时刻,采集(k-m)时刻的永磁同步电机电角度θ、dq轴定子电流值,根据式(1)、式(2)分别获得对应时刻电流状态估计模块的输入值与应用值yx;
8、
9、
10、其中,n表示电压矢量数,n=1,2,…8;m的值等于从施加与(k-1)开始处施加的电压矢量不同的电压矢量开始的时间步数;ix为永磁同步电机定子电流;δix为定子电流差。
11、进一步的,所述步骤s3包括如下具体步骤:
12、步骤s31:电流状态估计模块初始化;
13、步骤s32:迭代电流状态估计模块中的矩阵计算,直到达到判断依据ed<=0.00001,则输出d轴电流差的估计值pd;
14、步骤s33:以同样的步骤估计q轴电流差pq,从而得到(k+1)时刻的电流预测值;
15、步骤s34:预测(k+1)时刻的角速度,将(k+1)时刻的电流预测值再次进行s31-s33的步骤,得到(k+2)时刻的电流预测值,确定电流预测模型。
16、进一步的,所述步骤s31包括:给定协方差矩阵的初始值q0如式(3)所示,再由式(4)获得增益矩阵的初始值g0;
17、
18、g0=q0ψd0t(ψd0q0ψd0t+μi)-1 (4)
19、其中ψd0为当前时刻采集的电角度根据式(1)获得的输入初始值,μ为模块遗忘因子参数;i为一个2*2的单位矩阵。
20、进一步的,所述步骤s32包括:将协方差矩阵的初始值q0、增益矩阵的初始值g0输入式(5)至(7),进行迭代计算,每次获取到d轴电流差的估计值之后根据式(8)进行判断依据ed的计算,一旦满足ed<=0.00001,输出最终估计的d轴电流差的两个部分估计值
21、gd(k)=qd(k-1)ψdt(k)(ψdqd(k-1)ψdt(k)+μi)-1 (5)
22、
23、pd(k)=pd(k-1)+gd(k)(yd(k)-ψd(k)pd(k-1)) (7)
24、
25、其中qd(k)为第k次迭代计算的协方差矩阵,gd(k)为第k次迭代计算的增益矩阵。
26、进一步的,所述步骤s33中,最终估计的q轴电流差的两个部分估计值pq1为自然衰减估计值,pq2为强制响应估计值。从而根据式(9)、式(10)得到定子电流差的未来估计值,最后根据式(11)获得(k+1)时刻电流的预测值ix(k+1);
27、
28、
29、ix(k+1)=ix(k)+δix(k+1) (11)
30、其中δid(k+1)为(k+1)时刻定子d轴电流差估计值,δiq(k+1)为(k+1)时刻定子q轴电流差估计值。
31、进一步的,所述步骤s34包括:根据式(12)预测(k+1)时刻的永磁同步电机电角度θ(k+1),再根据步骤s31到步骤s33获得(k+2)时刻电流的预测值ix(k+2),如式(13)所示。
32、θ(k+1)=θ(k)+ω(k)ts (12)
33、ix(k+2)=ix(k+1)+δix(k+2) (13)
34、其中ts为采样周期,ω为角频率。
35、有益效果:本发明提供的一种基于电流状态估计的pmsm无参数预测控制方法,利用已知电压矢量引起的过去测量电流差中嵌套的信息来估计未来电流状态,采用递归最小二乘算法对模型参数运行时间进行自适应控制,实现了无参数控制,提升了系统的参数鲁棒性,解决了电流差更新停滞的问题,大大降低了电流对工作点和速度的预测灵敏度。同时该控制自适应算法适用于任何同步电机,从而减轻了电机与来自不同厂商的逆变器的匹配问题。
技术特征:
1.一种基于电流状态估计的pmsm无参数预测控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于电流状态估计的pmsm无参数预测控制方法,其特征在于,所述步骤s1中包括如下具体步骤:定义八个电压矢量对应开关状态为v1(0,0,1),v2(0,1,0),v3(0,1,1),v4(1,0,0),v5(1,0,1),v6(1,1,0),v7(0,0,0),v8(1,1,1),采集并存储每时刻的应用电压矢量vn,并判断出与(k-1)时刻开始处施加的电压矢量不同的电压矢量开始的时刻,即(k-m)时刻,采集(k-m)时刻的永磁同步电机电角度θ、dq轴定子电流值,根据式(1)、式(2)分别获得对应时刻电流状态估计模块的输入值与应用值yx;
3.根据权利要求2所述的基于电流状态估计的pmsm无参数预测控制方法,其特征在于,所述步骤s3包括如下具体步骤:
4.根据权利要求3所述的基于电流状态估计的pmsm无参数预测控制方法,其特征在于,所述步骤s31包括:给定协方差矩阵的初始值q0如式(3)所示,再由式(4)获得增益矩阵的初始值g0;
5.根据权利要求4所述的基于电流状态估计的pmsm无参数预测控制方法,其特征在于,所述步骤s32包括:将协方差矩阵的初始值q0、增益矩阵的初始值g0输入式(5)至(7),进行迭代计算,每次获取到d轴电流差的估计值之后根据式(8)进行判断依据ed的计算,一旦满足ed<=0.00001,输出最终估计的d轴电流差的两个部分估计值
6.根据权利要求5所述的基于电流状态估计的pmsm无参数预测控制方法,其特征在于,所述步骤s33中,最终估计的q轴电流差的两个部分估计值pq1为自然衰减估计值,pq2为强制响应估计值。从而根据式(9)、式(10)得到定子电流差的未来估计值,最后根据式(11)获得(k+1)时刻电流的预测值ix(k+1);
7.根据权利要求6所述的基于电流状态估计的pmsm无参数预测控制方法,其特征在于,所述步骤s34包括:根据式(12)预测(k+1)时刻的永磁同步电机电角度θ(k+1),再根据步骤s31到步骤s33获得(k+2)时刻电流的预测值ix(k+2),如式(13)所示。
技术总结
本发明公开了一种基于电流状态估计的PMSM无参数预测控制方法,包括如下步骤:采集并存储每时刻的三相电流、永磁同步电机电角度、应用电压矢量,获取电流状态估计模块的输入值与应用值;基于转速外环PI控制器、MTPA模块获取dq轴参考电流;基于递归最小二乘的电流状态估计模块,获取当前电流差的自然衰减估计值与强制响应估计值,从而更新(k+1)时刻、(k+2)时刻电流预测值;通过滚动优化输出使价值函数最小的基本电压矢量。本发明实现了无参数控制,提升了系统的参数鲁棒性,解决了电流差更新停滞的问题,大大降低了电流对工作点和速度的预测灵敏度。
技术研发人员:於锋,周陈辉,王子诺
受保护的技术使用者:南通大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!