一种隔离型DC/DC变流器的鲁棒状态反馈控制方法与流程
本发明电力电子,尤其涉及一种隔离型dc/dc变流器的鲁棒状态反馈控制方法。
背景技术:
1、在生态环境不断恶化和化石能源不断枯竭的大背景下,太阳能、风电等新能源发电形式在电网中的占比不断增大,其发出的电能可以用直流的形式汇集到直流母线上。新能源系统的直流母线上往往可以带一些本地的直流负载,其中一些负载对工作条件的要求颇为苛刻,因此需要选择合适的dc/dc变流器来进行稳定优质的控制。
2、针对上述场景,多采用隔离型dc/dc变流器,常用的和经典的控制器则主要还是基于负反馈串联补偿的比例积分(pi)控制器。pi控制器由于其对模型参数精度要求不高,容易实现的特点获得了广泛的应用,尤其是电压电流双闭环的控制结构。但是,电压电流双环pi控制器不仅需要外环与内环解耦配合,传递函数推算过程复杂,而且缺乏设计控制器参数的具体且有针对性的方法,设计过程中只能根据系统的波特图判断系统的性能,闭环系统的零极点配置复杂且受限。针对pi控制器的以上问题,一些学者提出将模型预测控制,状态反馈控制等现代控制方法应用于电力电子变流器。但这些控制方法取得良好的控制效果的前提是对被控系统的精确建模上。因此,针对无法精确建模的系统设计出具有良好鲁棒性能的控制器,具有显著意义。
技术实现思路
1、为实现上述目的,本发明提供了如下方案:一种隔离型dc/dc变流器的鲁棒状态反馈控制方法,包括:
2、基于并联在新能源系统直流母线难以建模的直流负载,划分为线性部分和非线性部分;
3、针对所述线性部分建立系统的线性简化模型,在所述线性简化模型的基础上应用状态反馈方法改善系统控制特性;
4、将所述非线性部分看作外部扰动,通过h∞控制方法降低非线性部分对系统性能的影响,实现对隔离型dc/dc变流器的鲁棒状态反馈控制。
5、优选地,针对所述线性部分建立系统的线性简化模型的过程包括,
6、在建模过程中将难以建模的直流负载等效为一个线性电阻,电阻与实际模型的误差考虑为电流扰动,同时考虑输入电压的扰动,采用前馈的方法补偿输入电压的扰动,建立所述线性简化模型。
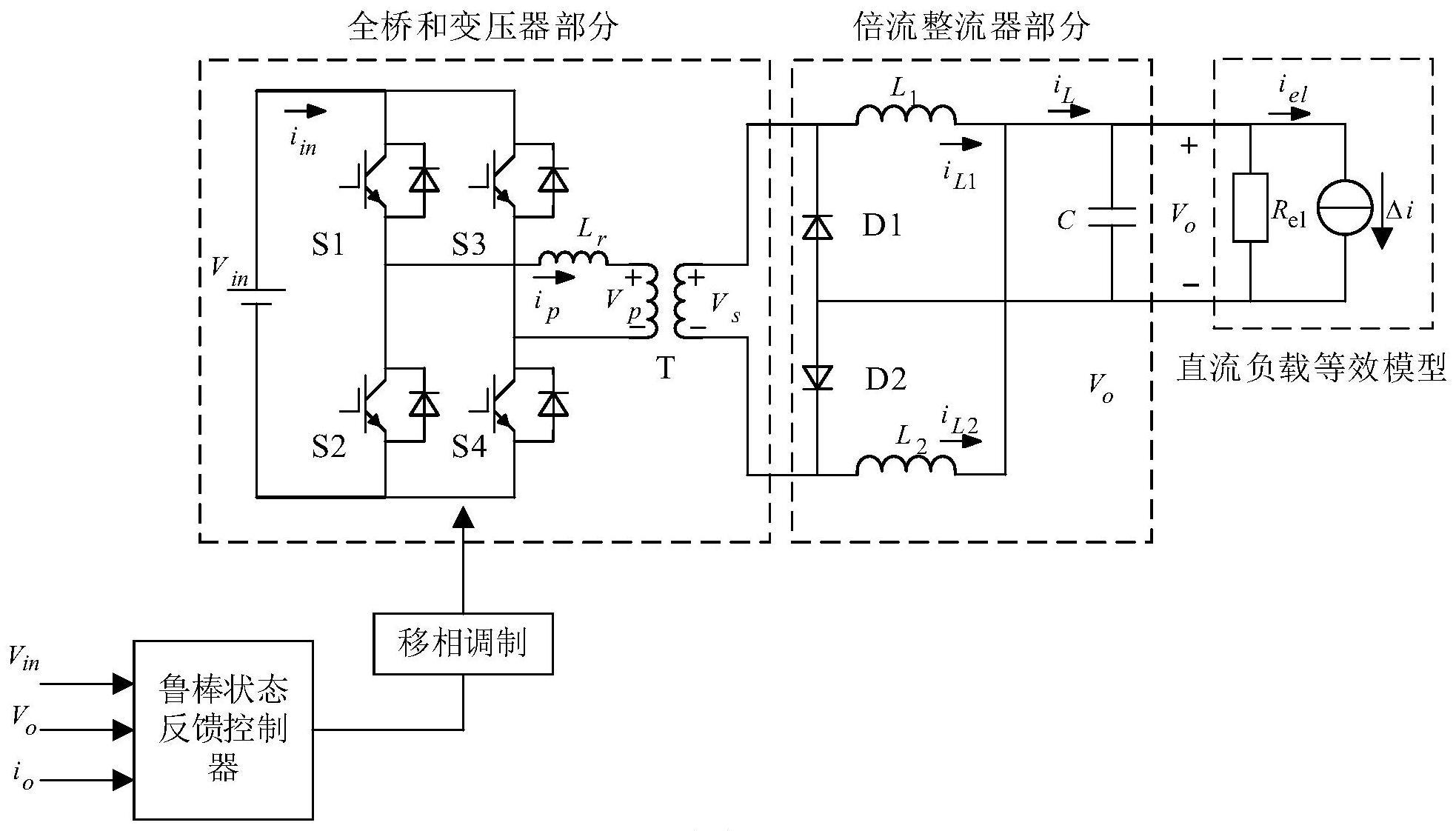
7、优选地,所述线性简化模型包括psfb_cdr并网变流器、新能源系统直流母线和直流负载;
8、其中,所述直流负载被简化为一个线性电阻rel与非线性电流扰动δi的组合;
9、所述psfb_cdr并网变流器的主电路包括h桥、高频变压器、倍流整流电路、滤波电感l1、滤波电感l2以及滤波电容c。
10、优选地,在所述线性简化模型的基础上应用状态反馈方法改善系统控制特性的过程包括,
11、根据所述线性简化模型设计状态反馈控制器,利用状态反馈方法任意配置极点使系统获得更好的动态和稳态特性。
12、优选地,根据所述线性简化模型设计状态反馈控制器的过程包括,
13、选择两个滤波电感电流之和与输出电容电压为状态量,并构建输出电压误差量的积分作为第三个状态量以消除输出稳态误差;将三个状态量乘以反馈系数反馈到系统输入量占空比d构成状态反馈控制器;
14、其中,所述状态反馈控制器反馈系数的求取同时满足将系统极点配置在指定区域和电流扰动到输出量的传递函数的无穷范数最小。
15、优选地,通过h∞控制方法降低非线性部分对系统性能的影响的过程包括,
16、通过h∞控制方法使直流负载模型误差等效出的电流扰动对系统的影响降到最小,通过线性矩阵不等式方法求解具有极点约束和h∞约束的状态反馈控制器;
17、优选地,通过线性矩阵不等式方法求解具有极点约束和h∞约束的状态反馈控制器的公式表达式为:
18、
19、其中,第一个式子是优化问题的目标函数,式中,γ为电流扰动到输出量的传递函数的无穷范数,也叫做扰动抑制度;
20、第二个式子和第三个式子是使闭环系统满足扰动抑制度的线性矩阵不等式约束;
21、第四个式子是使闭环系统极点落在给定圆形区域的线性矩阵不等式约束;式中q为圆形区域的圆心坐标,r为圆形区域半径。
22、优选地,所述第二个式子和第三个式子中的w和x为待求矩阵,且k=wx-1;
23、其余各矩阵来自系统的状态空间描述:
24、
25、z=c1x+d11w+d12u
26、y=c2x+d21w+d22u
27、式中:x为状态变量;w为广义扰动输入,表示外部扰动及内部未建模动态;u为系统的控制输入,也是控制器的输出;z为评价输出信号;y为量测输出,通常具有明确的物理意义;a、b1、b2、c1、c2、d11、d12、d21、d22分别为具有相应维数的常系数矩阵。
28、与现有技术相比,本发明具有如下优点和技术效果:
29、本发明通过将难以建模的直流负载分解为线性电阻与非线性电流扰动两部分,得到系统的线性简化模型,在此模型基础上应用状态反馈方法实现了系统极点的任意配置,解决了pi控制难以兼顾动态和抗扰特性的问题。采用h∞控制方法将非线性电流扰动对系统的影响降到最小,即线性简化模型与实际模型之间的误差对系统的影响最小,增强了系统的鲁棒性。
技术特征:
1.一种隔离型dc/dc变流器的鲁棒状态反馈控制方法,其特征在于,包括:
2.根据权利要求1所述的隔离型dc/dc变流器的鲁棒状态反馈控制方法,其特征在于,针对所述线性部分建立系统的线性简化模型的过程包括,
3.根据权利要求2所述的隔离型dc/dc变流器的鲁棒状态反馈控制方法,其特征在于,
4.根据权利要求1所述的隔离型dc/dc变流器的鲁棒状态反馈控制方法,其特征在于,在所述线性简化模型的基础上应用状态反馈方法改善系统控制特性的过程包括,
5.根据权利要求4所述的隔离型dc/dc变流器的鲁棒状态反馈控制方法,其特征在于,根据所述线性简化模型设计状态反馈控制器的过程包括,
6.根据权利要求1所述的隔离型dc/dc变流器的鲁棒状态反馈控制方法,其特征在于,通过h∞控制方法降低非线性部分对系统性能的影响的过程包括,
7.根据权利要求6所述的隔离型dc/dc变流器的鲁棒状态反馈控制方法,其特征在于,通过线性矩阵不等式方法求解具有极点约束和h∞约束的状态反馈控制器的公式表达式为:
8.根据权利要求7所述的隔离型dc/dc变流器的鲁棒状态反馈控制方法,其特征在于,
技术总结
本发明公开了一种隔离型DC/DC变流器的鲁棒状态反馈控制方法,包括利用状态反馈可以任意配置极点的优点来设计控制器,使系统能获得更优的动态性能,同时考虑了输入输出对系统的影响,采用前馈的方法减小输入电压波动对系统的影响。针对负载模型不确定性,本发明提出一种方法将其分解成线性和非线性两部分,采用鲁棒控制方法使系统的线性模型满足控制要求,将非线性部分看作外部扰动,采用<supgt;H</supgt;<subgt;∞</subgt;控制的方法减小难以建模的非线性部分对系统性能的影响。用线性矩阵不等式方法求解了上述控制器设计问题,此控制器设计方法同时具有良好的动态特性和优秀的抗扰特性。
技术研发人员:刘黎,段天元,詹志雄,周健科,王勇,马浩鹏,戴杰,饶友元,赵勋范,徐金昊
受保护的技术使用者:国网浙江省电力有限公司舟山供电公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!