一种基于无模型参考自适应的转子位置估算方法
本发明涉及一种电机控制方法,特别涉及一种电机的转子位置的估算方法。
背景技术:
1、无位置传感器控制技术采样电机中相关电信号用以估算转子位置和速度信息,除去了机械式位置传感器,从而减小了系统体积和重量,降低了成本和硬件复杂度,提高了系统运行性能。
2、基波模型法利用电机基波激励的反电动势或者磁链信息进行位置估计,可以较好地实现电机无位置传感器控制。基波模型法主要包括滑模观测器法、磁链观测器法、扩展卡尔曼滤波器法、模型参考自适应法等。其中模型参考自适应法具有控制相对简单、不需要额外的信号注入、稳定性好等特点,在无位置传感器控制中得到较好的实际应用。
3、该方法中的可调模型中包含了较多的电机参数,因此,该方法下的控制系统对电机参数的精度具有较高的依赖性。然而,在实际运行过程中,电机的参数是时变的,导致电机的实际模型与可调模型不相匹配,从而使控制系统精度和稳定性降低。
技术实现思路
1、发明目的:针对上述现有技术,提出一种基于无模型参考自适应的转子位置估算方法,解决传统的模型参考自适应法受参数精度影响所带来的控制精度不高、系统稳定性差的问题。
2、技术方案:一种基于无模型参考自适应的转子位置估算方法,包括:读取混合励磁轴向磁通切换电机的dq轴电压ud、uq以及励磁电压uf,dq轴电流id、iq以及励磁电流if,通过带遗忘因子的最小二乘法实现对电机参数的辨识,并基于辨识结果构建电机的可调模型以及自适应律,从而得到估计的转子角速度和估计转子位置
3、进一步的,通过带遗忘因子的最小二乘法实现对电机参数的辨识,包括以下步骤:
4、分别读入(k-1)时刻的遗忘因子λ(k-1)、电感辨识模型中的待辨识参数矩阵及其协方差矩阵p1(k-1),以及电阻和互感辨识模型中的待辨识参数矩阵及其协方差矩阵p2(k-1);
5、根据电感辨识模型,调用带遗忘因子λ(k-1)的递推最小二乘法,计算k时刻电感辨识模型的增益矩阵k1(k)和待辨识参数矩阵并更新k时刻电感辨识模型中的协方差矩阵p1(k):
6、
7、式中,0<λ(k-1)≤1,i是单位矩阵;y1(k)是电感辨识模型的输出矩阵,φ1(k)是电感辨识模型的输入矩阵,是φ1(k)的转置,并满足:
8、
9、根据dq坐标系下的永磁同步电机电压离散方程得到:
10、
11、
12、式中,ψm为永磁体磁链,ωe为转子角速度,为电枢绕组阻值辨识值,为励磁绕组阻值辨识值,为励磁绕组与三相绕组间的互感辨识值,为直轴电感辨识值,为交轴电感辨识值,为励磁电感辨识值,t为采样周期;参数下标的(k-1)、(k)及(k+1)分别表示对应参数在(k-1)时刻、k时刻、(k+1)时刻的值;
13、根据式(5)得到直轴电感辨识值交轴电感辨识值励磁电感辨识值
14、根据电阻和互感辨识模型,再次调用带遗忘因子λ(k-1)的递推最小二乘法,计算k时刻电阻和互感辨识模型的增益矩阵k2(k)和待辨识参数矩阵并更新电阻和互感辨识模型中的协方差矩阵p2(k);
15、
16、式中,y2(k)是电阻和磁链辨识模型的输出矩阵,φ2(k)是电阻和磁链辨识模型的输入矩阵,是φ2(k)的转置,并满足:
17、
18、根据dq坐标系下的永磁同步电机电压离散方程得到:
19、
20、
21、根据式(7)计算得到辨识值和
22、进一步的,电机参数的辨识中,遗忘因子的更新包括如下具体步骤:
23、计算模型辨识误差,模型的误差表示为:
24、
25、式中,eld(k)是直轴电感辨识误差的绝对值;elq(k)是交轴电感辨识误差的绝对值;efd(k)是励磁电感辨识误差的绝对值;ers(k)是电阻辨识误差的绝对值,erf(k)是励磁电阻识误差的绝对值;emf(k)是互感辨识误差的绝对值;
26、最大辨识误差e_max(k)表示为:
27、e_max(k)=max{eld(k)、elq(k)、elf(k)、ers(k)、erf(k)、emf(k)} (9)
28、根据最大辨识误差e_max(k),对参数辨识过程中的遗忘因子λ(k)进行更新:
29、
30、式中,δ为误差阈值,α是可调系数;
31、进一步的,基于辨识结果构建电机的可调模型以及自适应律,从而得到估计的转子角速度和估计转子位置包括如下具体步骤:
32、定义广义误差则误差表示为:
33、
34、式中,i’q=iq,i’f=if,分别为下i'd、i'q、i'f的估计形式,ed为参考模型中的i'd与可调模型中的的误差,eq为参考模型中的i'q与可调模型中的的误差,ef为参考模型中的i'f与可调模型中的的误差;
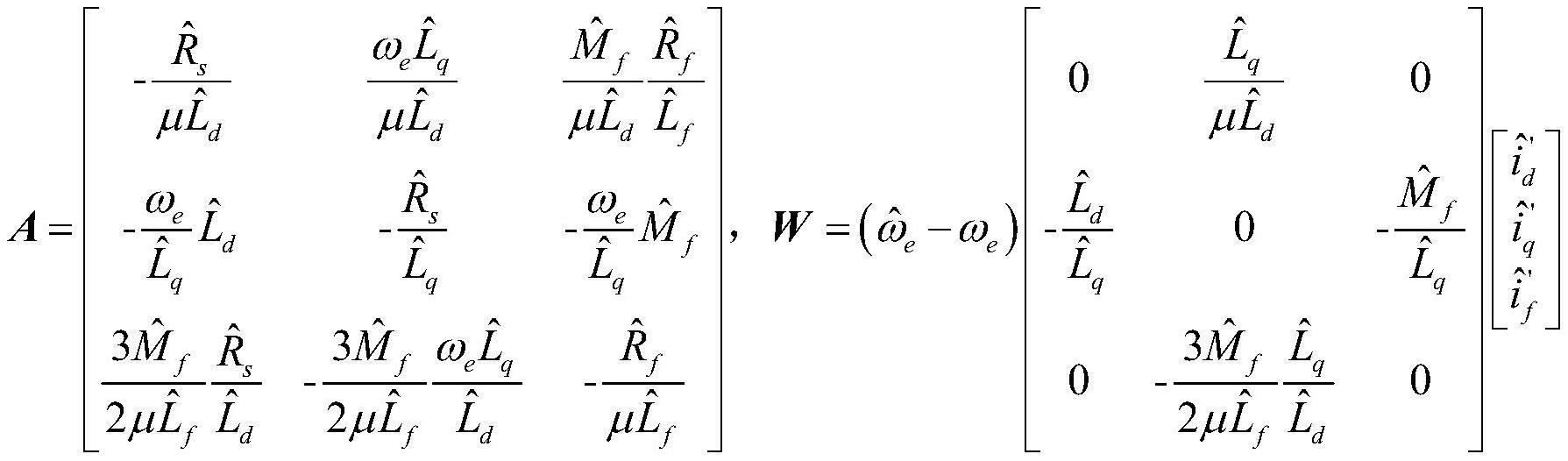
35、在广义误差e下,电机的误差模型简化为:
36、
37、
38、式中,中间量
39、根据popov超稳定性理论,自适应律旨在使模型可调有效地接近参考模型并确保系统稳定性,则表示为:
40、
41、
42、式中,kp、ki分为自适应律的比例、积分系数;分别为id、iq、if的估计形式。
43、有益效果:本发明提出了一种基于无模型参考自适应的转子位置估算方法,通过采集相关的电信号,辨识出电机的相关参数,并基于辨识结果构建电机的可调模型以及自适应律,从而实现电机的转子位置估算。本发明设计的转子位置估算方法,能够根据采集的相关电信号,自适应调节转子位置观测器中可调模型的电机参数,提高可调模型与参考模型的一致性,解决了传统模型参考自适应法受参数影响所带来的控制精度不高、系统稳定性差的问题。
技术特征:
1.一种基于无模型参考自适应的转子位置估算方法,其特征在于,包括:读取混合励磁轴向磁通切换电机的dq轴电压ud、uq以及励磁电压uf,dq轴电流id、iq以及励磁电流if,通过带遗忘因子的最小二乘法实现对电机参数的辨识,并基于辨识结果构建电机的可调模型以及自适应律,从而得到估计的转子角速度和估计转子位置
2.根据权利要求1所述的一种基于无模型参考自适应的转子位置估算方法,其特征在于,通过带遗忘因子的最小二乘法实现对电机参数的辨识,包括以下步骤:
3.根据权利要求2所述的一种基于无模型参考自适应的转子位置估算方法,其特征在于,电机参数的辨识中,遗忘因子的更新包括如下具体步骤:
4.根据权利要求2所述的一种基于无模型参考自适应的转子位置估算方法,其特征在于,基于辨识结果构建电机的可调模型以及自适应律,从而得到估计的转子角速度和估计转子位置包括如下具体步骤:
技术总结
本发明公开了一种基于无模型参考自适应的转子位置估算方法,通过采集两组不同时刻的电压方程在线辨识出混合励磁轴向磁通切换电机中的相关参数信息,并基于辨识结果构建电机的可调模型以及自适应律,从而得到估计的转子位置本发明设计的转子位置估算方法,能够根据采集的相关电信号,自适应调节转子位置观测器中可调模型的电机参数,保持可调模型与参考模型的一致性,解决了传统的模型参考自适应法受参数影响所带来的控制精度不高、系统稳定性差的问题。
技术研发人员:张蔚,金华洋,蒲云豪,凡昊洁
受保护的技术使用者:南通大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!